物体方向的确定方法、装置、设备、机器人和存储介质与流程
本申请涉及机器人视觉,尤其涉及物体方向的确定方法、装置、设备、机器人和存储介质。
背景技术:
1、随着科技的发展,技术的进步,机器人已逐渐进入人类社会的各个领域。机器人的自主运动和定位需要借助环境地图来实现,传统的机器人存储的环境地图中只包括环境的几何信息,因此机器人只能执行一些简单的移动,也缺乏理解环境、人机/物机交互等业务逻辑的高层次语义信息。
技术实现思路
1、本申请旨在至少解决相关技术中存在的技术问题之一。为此,本申请提出一种物体方向的确定方法。
2、本申请还提出一种物体方向的确定装置、电子设备、机器人和存储介质。
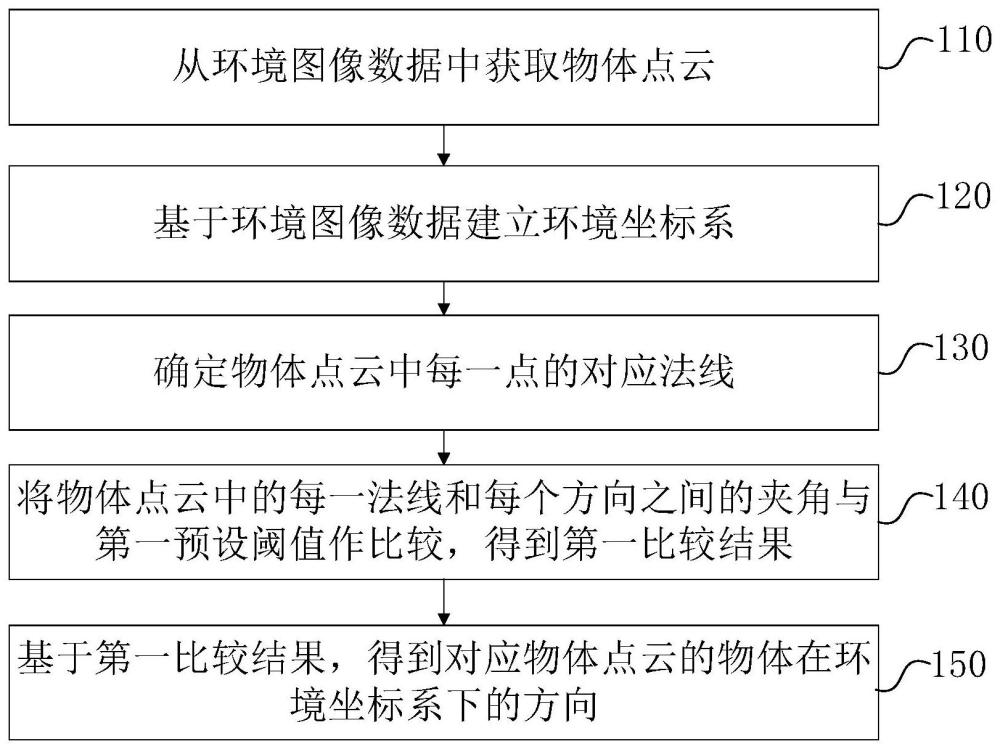
3、根据本申请第一方面实施例的物体方向的确定方法,包括:从环境图像数据中获取物体点云;基于环境图像数据建立环境坐标系;其中环境坐标系包括至少两个方向;确定物体点云中每一点的对应法线;将物体点云中的每一法线和每个方向之间的夹角与第一预设阈值作比较,得到第一比较结果;基于第一比较结果,得到对应物体点云的物体在环境坐标系下的方向。
4、根据本申请实施例的物体方向的确定方法,将物体点云中的每一法线和每个方向之间的夹角与第一预设阈值作比较,基于第一比较结果,得到对应物体在环境坐标系下的方向,使用物体点云的法线和物体方向的关系,提升了物体方向计算的精度,为实现更高层次的智能化操作提供信息支持。
5、根据本申请的一个实施例,基于环境图像数据建立环境坐标系,包括:建立世界坐标系;基于环境图像数据和世界坐标系,生成环境坐标系;基于环境坐标系生成至少两个方向;其中每一方向具有唯一的单位向量。
6、根据本申请的一个实施例,基于环境坐标系生成至少两个方向,包括:基于环境坐标系生成第一方向、第二方向、第三方向和第四方向;其中,环境坐标系的坐标原点位于地面;环境坐标系的z轴垂直于地面向上;环境坐标系的x轴、y轴和z轴两两相互垂直;第一方向的单位向量为(1,0,0),第二方向的单位向量为(-1,0,0),第三方向的单位向量为(0,1,0),第四方向的单位向量为(0,-1,0)。
7、根据本申请的一个实施例,将物体点云中的每一法线和每个方向之间的夹角与第一预设阈值作比较,得到第一比较结果,包括:确定物体点云中的每一法线和每个方向之间的夹角;将每一夹角与第一预设阈值作比较,并将小于或等于第一预设阈值的夹角作为目标夹角;基于所有目标夹角对应的方向的个数,得到第一比较结果。
8、根据本申请的一个实施例,基于第一比较结果,得到对应物体点云的物体在环境坐标系下的方向,包括:基于第一比较结果,确定每一方向对应的目标夹角的数量;基于所有方向对应的目标夹角的数量,将数量最多的目标夹角对应的方向作为物体在环境坐标系下的方向。
9、根据本申请的一个实施例,基于第一比较结果,得到对应物体点云的物体在环境坐标系下的方向,包括:基于第一比较结果,确定每一方向对应的目标夹角的数量;将对应的目标夹角的数量大于或等于第二预设阈值的方向作为目标方向;其中目标方向包括至少两个;基于至少两个目标方向,得到物体在环境坐标系下的方向;其中,物体在环境坐标系下的方向与目标方向不相同。
10、根据本申请第二方面实施例的物体方向的确定装置,包括:物体点云获取模块,用于从环境图像数据中获取物体点云;坐标系建立模块,用于基于环境图像数据建立环境坐标系;其中环境坐标系包括至少两个方向;法线确定模块,用于确定物体点云中每一点的对应法线;阈值比较模块,用于将物体点云中的每一法线和每个方向之间的夹角与第一预设阈值作比较,得到第一比较结果;方向确定模块,用于基于第一比较结果,得到对应物体点云的物体在环境坐标系下的方向。
11、根据本申请第三方面实施例的电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行程序时实现如上述任一种物体方向的确定方法。
12、根据本申请第四方面实施例的机器人,包括控制单元;控制单元用于执行上述任一种物体方向的确定方法。
13、根据本申请第五方面实施例的非暂态计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上述任一种物体方向的确定方法。
14、本申请实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
15、通过使用物体点云的法线和物体方向的关系,将物体点云中的每一法线和每个方向之间的夹角与第一预设阈值作比较,并基于第一比较结果得到对应物体在环境坐标系下的方向,提升了物体方向计算的精度;
16、物体方向是语义地图中重要的语义信息,通过获取准确的物体方向,可以使得机器人在语义层次上理解环境信息,便于完成一些高层次的复杂任务,为实现更高层次的智能化操作提供信息支持。
17、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种物体方向的确定方法,其特征在于,包括:
2.根据权利要求1所述的物体方向的确定方法,其特征在于,所述基于所述环境图像数据建立环境坐标系,包括:
3.根据权利要求2所述的物体方向的确定方法,其特征在于,所述基于所述环境坐标系生成至少两个方向,包括:
4.根据权利要求1-3任一项所述的物体方向的确定方法,其特征在于,所述将所述物体点云中的每一法线和每个方向之间的夹角与第一预设阈值作比较,得到第一比较结果,包括:
5.根据权利要求4所述的物体方向的确定方法,其特征在于,所述基于所述第一比较结果,得到对应所述物体点云的物体在所述环境坐标系下的方向,包括:
6.根据权利要求4所述的物体方向的确定方法,其特征在于,所述基于所述第一比较结果,得到对应所述物体点云的物体在所述环境坐标系下的方向,包括:
7.一种物体方向的确定装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的物体方向的确定方法。
9.一种机器人,其特征在于,包括控制单元;所述控制单元用于执行如权利要求1至6任一项所述的物体方向的确定方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的物体方向的确定方法。
技术总结
本申请涉及机器人视觉技术领域,提供物体方向的确定方法、装置、设备、机器人和存储介质,该方法包括:从环境图像数据中获取物体点云;基于环境图像数据建立环境坐标系;其中环境坐标系包括至少两个方向;确定物体点云中每一点的对应法线;将物体点云中的每一法线和每个方向之间的夹角与第一预设阈值作比较,得到第一比较结果;基于第一比较结果,得到对应物体点云的物体在环境坐标系下的方向。通过上述方式,本申请通过物体点云的法线去确定对应物体的方向,提升了物体方向计算的精度,可以使得机器人在语义层次上理解环境信息,为实现更高层次的智能化操作提供信息支持。
技术研发人员:张智胜,区志财,梅江元,刘三军,李育胜
受保护的技术使用者:美的集团(上海)有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!