一种目标跟踪方法、终端及计算机可读存储介质与流程
本发明涉及目标跟踪,特别是涉及一种目标跟踪方法、终端及计算机可读存储介质。
背景技术:
1、在智慧交通建设过程中,对道路监控而言,检测到的目标运动状态是对实时道路进行感知、分析、预测、控制和决策的重要考量因素。
2、各道路拥有的传感器仅有摄像头,而没有雷达等传感器,因此大多数目标状态仅能依靠目标检测和目标跟踪以及后续的逻辑判断所决定,而在目标处在遮挡状态下,目标检测的目标位置会发生较大误差和波动,会造成目标跟踪过程中目标发生丢失情况,会对后续的事件判断造成极大干扰。
技术实现思路
1、本发明主要解决的技术问题是提供一种目标跟踪方法、终端及计算机可读存储介质,解决现有技术中目标跟踪准确率低的问题。
2、为解决上述技术问题,本发明采用的第一个技术方案是:提供一种目标跟踪方法,目标跟踪方法包括:
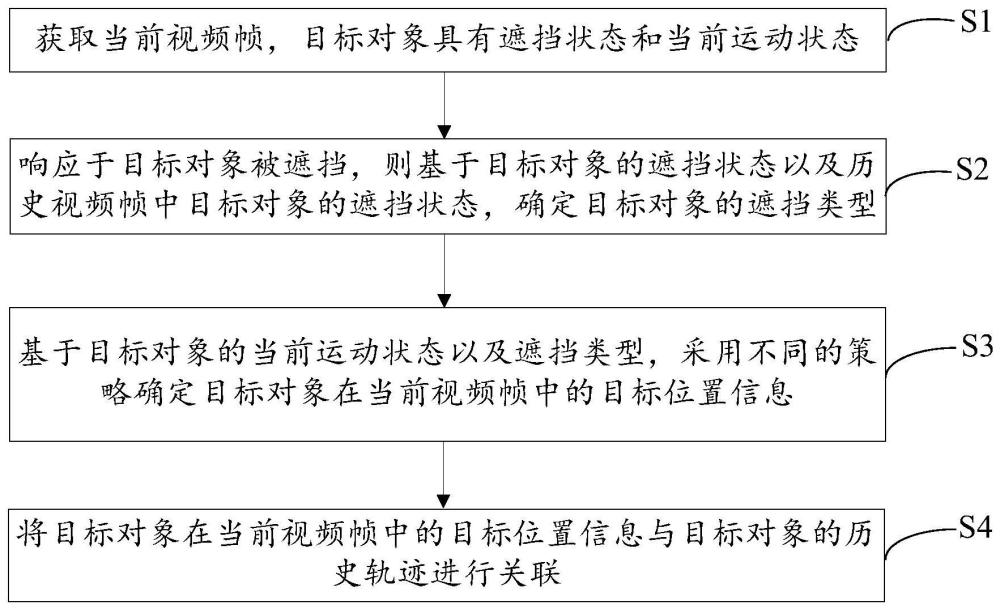
3、获取当前视频帧,目标对象具有遮挡状态和当前运动状态;
4、响应于目标对象被遮挡,则基于目标对象的遮挡状态以及历史视频帧中目标对象的遮挡状态,确定目标对象的遮挡类型;
5、基于目标对象的当前运动状态以及遮挡类型,采用不同的策略确定目标对象在当前视频帧中的目标位置信息;
6、将目标对象在当前视频帧中的目标位置信息与目标对象的历史轨迹进行关联。
7、其中,当前视频帧包括包含目标对象的检测框;
8、获取目标对象的遮挡状态的步骤包括:
9、基于当前视频帧中当前目标对象的检测框与另一目标对象的检测框之间的重叠度,确定当前目标对象是否被另一目标对象遮挡;
10、响应于当前目标对象被另一目标对象遮挡,则基于当前目标对象的检测框的位置信息与另一目标对象的检测框的位置信息确定当前目标对象的遮挡状态。
11、其中,基于当前目标对象的检测框的位置信息与另一目标对象的检测框的位置信息确定当前目标对象的遮挡状态,包括:
12、响应于当前视频帧中当前目标对象的检测框的左边线与另一目标对象的左边线之间的距离小于未遮挡状态的当前目标对象的检测框的宽度,则确定目标对象的遮挡状态为右遮挡;
13、响应于当前视频帧中当前目标对象的检测框的右边线与另一目标对象的右边线之间的距离小于未遮挡状态的当前目标对象的检测框的宽度,则确定目标对象的遮挡状态为左遮挡;
14、响应于当前视频帧中当前目标对象的检测框的上边线与另一目标对象的上边线之间的距离小于未遮挡状态的当前目标对象的检测框的长度,则确定目标对象的遮挡状态为下遮挡;
15、响应于当前视频帧中当前目标对象的检测框的下边线与另一目标对象的下边线之间的距离小于未遮挡状态的当前目标对象的检测框的长度,则确定目标对象的遮挡状态为上遮挡;
16、响应于当前视频帧中当前目标对象的检测框的任意边线与另一目标对象的近邻边线之间的距离不大于零,则确定目标对象的遮挡状态为全遮挡。
17、其中,获取目标对象的当前运动状态的步骤包括:
18、将当前视频帧中目标对象的位置信息与历史视频帧中的历史目标进行比对,确定目标对象的历史轨迹;
19、基于当前视频帧中目标对象的位置信息以及历史轨迹中目标对象的位置信息,确定目标对象的当前运动状态。
20、其中,目标对象的位置信息包括预设轨迹点的位置信息;
21、基于当前视频帧中目标对象的位置信息以及历史轨迹中目标对象的位置信息,确定目标对象的当前运动状态,包括:
22、响应于至少两个预设轨迹点在当前视频帧中的位置信息与在历史视频帧中的位置信息之间的差值小于预设值,则确定目标对象的当前运动状态为静止状态;
23、响应于最多一个预设轨迹点在当前视频帧中的位置信息与在历史视频帧中的位置信息之间的差值小于预设值,则确定目标对象的当前运动状态为运动状态。
24、其中,预设轨迹点至少包括目标对象的检测框的左上角点、左下角点、右上角点、右下角点和中心点。
25、其中,遮挡状态包括无遮挡、左遮挡、右遮挡、全遮挡、下遮挡和下遮挡中的至少一种;
26、基于目标对象的遮挡状态以及历史视频帧中目标对象的遮挡状态,确定目标对象的遮挡类型,包括:
27、响应于目标对象在历史视频帧至当前视频帧中的遮挡状态依次为无遮挡、左遮挡、全遮挡、右遮挡过程中的任意一段,则确定目标对象的遮挡类型为渐变左遮挡;
28、响应于目标对象在历史视频帧至当前视频帧中的遮挡状态依次为无遮挡、右遮挡、全遮挡、左遮挡过程中的任意一段,则确定目标对象的遮挡类型为渐变右遮挡;
29、响应于目标对象在历史视频帧至当前视频帧中的遮挡状态依次为无遮挡、下遮挡、全遮挡、上遮挡过程中的任意一段,则确定目标对象的遮挡类型为渐变下遮挡;
30、响应于目标对象在历史视频帧至当前视频帧中的遮挡状态依次为无遮挡、上遮挡、全遮挡、下遮挡过程中的任意一段,则确定目标对象的遮挡类型为渐变上遮挡。
31、其中,当前运动状态为静止状态;
32、基于目标对象的当前运动状态以及遮挡类型,采用不同的策略确定目标对象在当前视频帧中的目标位置信息,包括:
33、响应于目标对象的当前运动状态为静止状态,且遮挡类型为渐变左遮挡、渐变右遮挡、渐变下遮挡或渐变上遮挡,则基于历史视频帧中目标对象的检测框的尺寸对当前视频帧中目标对象的检测框进行补全得到目标对象的目标框。
34、其中,当前运动状态为运动状态;
35、基于目标对象的当前运动状态以及遮挡类型,采用不同的策略确定目标对象在当前视频帧中的目标位置信息,包括:
36、响应于目标对象的当前运动状态为运动状态,则基于目标对象在历史视频帧中的位置信息确定目标对象的运行速度和运行加速度;
37、基于目标对象在相邻的历史视频帧中的位置信息以及运行速度、运行加速度,确定目标对象在当前视频帧中的位置信息;
38、基于目标对象的遮挡类型、目标对象在当前视频帧中的位置信息以及目标对象在未遮挡状态的检测框的尺寸预测目标对象在当前视频帧中的目标框。
39、其中,基于目标对象的遮挡类型、目标对象在当前视频帧中的位置信息以及目标对象在未遮挡状态的检测框的尺寸预测目标对象在当前视频帧中的目标框,包括:
40、响应于目标对象的遮挡类型为渐变左遮挡,则基于当前视频帧中目标对象的右边线与目标对象在未遮挡状态的检测框的尺寸确定目标对象在当前视频帧中的目标框;
41、响应于目标对象的遮挡类型为渐变右遮挡,则基于当前视频帧中目标对象的左边线与目标对象在未遮挡状态的检测框的尺寸确定目标对象在当前视频帧中的目标框;
42、响应于目标对象的遮挡类型为渐变上遮挡,则基于当前视频帧中目标对象的下边线与目标对象在未遮挡状态的检测框的尺寸确定目标对象在当前视频帧中的目标框;
43、响应于目标对象的遮挡类型为渐变下遮挡,则基于当前视频帧中目标对象的上边线与目标对象在未遮挡状态的检测框的尺寸确定目标对象在当前视频帧中的目标框。
44、其中,将目标对象在当前视频帧中的目标位置信息与目标对象的历史轨迹进行关联,包括:
45、将目标对象的目标框与当前视频帧中预设区域内的检测框进行匹配;
46、响应于目标对象的目标框与检测框的匹配度达到阈值,则将匹配度对应的检测框与目标对象的历史轨迹进行关联。
47、为解决上述技术问题,本发明采用的第二个技术方案是:提供一种目标跟踪装置,目标跟踪装置包括:
48、获取模块,用于获取当前视频帧,目标对象具有遮挡状态和当前运动状态;
49、确定模块,用于响应于目标对象被遮挡,则基于目标对象的遮挡状态以及历史视频帧中目标对象的遮挡状态,确定目标对象的遮挡类型;
50、分析模块,用于基于目标对象的当前运动状态以及遮挡类型,采用不同的策略确定目标对象在当前视频帧中的目标位置信息;
51、关联模块,用于将目标对象在当前视频帧中的目标位置信息与目标对象的历史轨迹进行关联。
52、为解决上述技术问题,本发明采用的第三个技术方案是:提供一种终端,终端包括存储器、处理器以及存储于存储器中并在处理器上运行的计算机程序,处理器用于执行程序数据以实现如上述的目标跟踪方法中的步骤。
53、为解决上述技术问题,本发明采用的第四个技术方案是:提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现如上述的目标跟踪方法中的步骤。
54、本发明的有益效果是:区别于现有技术的情况,提供的一种目标跟踪方法、终端及计算机可读存储介质,目标跟踪方法包括:获取当前视频帧,目标对象具有遮挡状态和当前运动状态;响应于目标对象被遮挡,则基于目标对象的遮挡状态以及历史视频帧中目标对象的遮挡状态,确定目标对象的遮挡类型;基于目标对象的当前运动状态以及遮挡类型,采用不同的策略确定目标对象在当前视频帧中的目标位置信息;将目标对象在当前视频帧中的目标位置信息与目标对象的历史轨迹进行关联。本技术通过确定目标对象的当前运动状态和遮挡类型,采用不同的策略确定目标对象在当前视频帧中的目标框,以便于在目标遮挡过程中将目标对象的目标框与目标对象的历史轨迹进行关联,提高目标对象的跟踪准确度。
- 还没有人留言评论。精彩留言会获得点赞!