太阳观测二维指向机构热变形在轨辨识方法及系统与流程
本发明涉及空间飞行器总体,具体地,涉及太阳观测二维指向机构热变形在轨辨识方法及系统。
背景技术:
1、在空间天气中,源于冕洞的太阳风构成了空间天气的基本环境,而太阳大气中的剧烈活动事件如耀斑和日冕物质抛射则是导致空间天气异常的主要因素,这类剧烈活动多发生于太阳上层大气,特别是过渡区和日冕。利用极紫外(euv)波段成像仪器对太阳进行成像观测,可以获得太阳耀斑、日冕物质抛射等剧烈活动信息,对太阳活动进行早期预报,进而预报灾害性空间天气事件,为人类的空间活动和国防建设提供准确预报。
2、由于卫星轨道运动的影响,太阳在卫星星体坐标系下会出现周期性运动。为了保证太阳观测仪在曝光时间范围内获取满足要求得太阳观测图像,需要采用二维指向机构实时调节太阳观测仪光轴的空间指向以精确对日指向跟踪。星上通常采用小视场高精度数字式太阳敏感器作为测量部件,其测量结果作为二维指向机构的控制输入。但在卫星地影期或月影期,高精度数字太敏无法提供信号,卫星出影后太阳观测仪器需要重新捕获太阳,严重影响仪器使用效率。此外,数字太敏一旦出现故障失效,太阳观测仪器将无法正常对准太阳成像,存在重大安全隐患。星上多采用卫星轨道、姿态及指向机构转角数据来实时解算太阳指向位置作为备份策略,但由于二维指向机构本身变形误差的存在,计算得到的太阳矢量指向存在较大偏差,无法满足太阳观测仪器成像要求。
3、专利文献cn102788234a(申请号:201210278883.3)公开了一种星载精密太阳指向机构,涉及精密机械跟踪测量技术领域,解决了现有的地面用太阳跟踪转台无锁紧机构而易使机构损害的问题,详细描述了该机构的组成和功能,但未阐述指向机构各关节误差建模及辨识方法。
4、专利文献cn107607070a(申请号:201710897408.7)公开了一种关节臂式坐标测量机热变形误差辨识校正方法,介绍了一种实验室条件下在关节臂上设置热监测点,采用最小二乘法确定变形参数,并对关节臂式坐标测量机的测量结果进行补偿的方法,但未阐述关节臂变形误差建模及辨识方法。
5、专利文献cn103234496a(申请号:201310106750.2)公开了一种三坐标测量机二维平台误差的高精度校正方法,介绍了利用刚性栅格板作为辅助测量装置,基于最小二乘法的自校正算法将待测二维平台误差以及所使用的栅格板标尺误差从原始测量数据中分离出来,实现对三坐标测量机二维平台的高精度校正,但未阐述二维平台误差建模及辨识方法。
6、专利文献cn103471563b(申请号:201310449960.1)公开了分布式相控阵天线的子阵波束指向角度校正方法,详细描述了该方法的工作原理及步骤,利用机身姿态参数计算卫星在地球坐标系中的坐标,利用子阵上的姿态参数计算卫星在子阵坐标系中的坐标,并将卫星在子阵坐标系上的坐标转换为卫星相对于该子阵的俯仰角和方位角。该校正方法适用于机载卫星通信中的分布式相控阵天线,工程实现简单,但未阐述热变形数学建模及辨识方法。
7、专利文献cn106610624a(申请号:201610811513.x)公开了一种校正机器人的手腕部的机构参数的校正装置及校正方法,详细描述了该方法的工作原理:校正装置使用对于离机器人的手前端最近的关节固定在预先决定的位置的目标、设置在机器人周围的摄像装置,来校正表示机器人的手腕部的机构模型的参数,但未阐述腕部机构变形数学模型及变形辨识方法。
8、本发明面向工程实际,提出了一种太阳观测二维指向机构热变形在轨辨识方法及系统,通过数学建模的方式严密描述了太阳观测二维指向机构变形传递过程,并提供了热变形在轨辨识和解算方法。本发明可应用于卫星总体或载荷分系统研制研发过程。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种太阳观测二维指向机构热变形在轨辨识方法及系统。
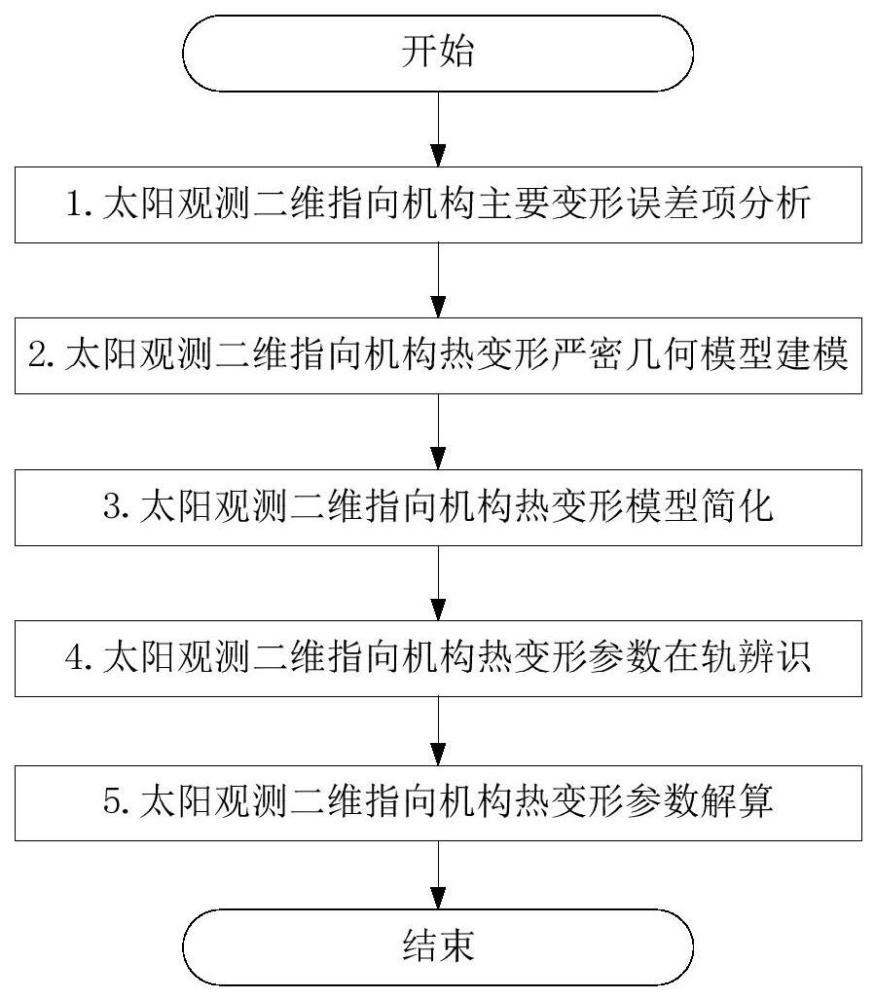
2、根据本发明提供的一种太阳观测二维指向机构热变形在轨辨识方法,包括:
3、步骤s1:太阳观测二维指向机构变形误差项分析;
4、步骤s2:太阳观测二维指向机构热变形严密几何模型建模;
5、步骤s3:简化太阳观测二维指向机构热变形模型简化;
6、步骤s4:太阳观测二维指向机构热变形参数在轨辨识;
7、步骤s5:太阳观测二维指向机构热变形参数解算。
8、优选地,所述步骤s1采用:
9、方位调节机构转轴支撑固连坐标系相对于卫星星体坐标系的变形,表示为:
10、
11、式中,θaz、ψaz分别为x、y、z三个方向的变形量。
12、俯仰调节机构转轴支撑固连坐标系相对于方位调节机构转轴支撑固连坐标系的变形,表示为:
13、
14、式中,θel、ψel分别为x、y、z三个方向的变形量。
15、高精度数字式太阳敏感器cmos探测器坐标系相对于俯仰调节机构转轴支撑固连坐标系的变形,表示为:
16、
17、式中,θcm、ψcm分别为x、y、z三个方向的变形量;
18、所述卫星星体坐标系:原点定义为卫星质心ob,在卫星零姿态时,卫星本体系与卫星轨道坐标系重合;
19、所述方位调节机构转轴支撑固连坐标系:原点oaz位于方位调节机构转轴支撑上,yaz轴与方位调节机构转轴平行,xaz轴与yaz轴垂直并指向俯仰调节机构转轴方向,zaz轴按右手法则确定;当方位调节机构位于0°位置时,在不存在变形的理想情况下,所述方位调节机构转轴支撑固连坐标系oazxazyazzaz与所述卫星星体坐标系obxbybzb三轴平行;
20、所述俯仰调节机构转轴支撑固连坐标系:原点oel位于俯仰调节机构转轴支撑上,xel轴与俯仰调节机构转轴平行,zel轴与xel轴垂直并指向太阳观测载荷尾部方向,yel轴按右手法则确定;当俯仰调节机构位于0°位置时,在不存在变形的理想情况下,所述俯仰调节机构转轴支撑固连坐标系oelxelyelzel与所述方位调节机构转轴支撑固连坐标系oazxazyazzaz三轴平行;
21、所述高精度数字式太阳敏感器cmos探测器坐标系原点ocm定义为太阳敏感器cmos探测器中心处,在未发生热变形时,太阳敏感器cmos探测器坐标系xcm轴,ycm轴,zcm轴分别与俯仰调节机构转轴支撑固连坐标系oelxelyelzel的三轴平行。
22、优选地,所述步骤s2采用:建立包含从卫星星体坐标系到高精度数字太敏探测器坐标系全路径热变形传递过程的严密几何模型;
23、
24、式中,θaz、ψaz、θel、ψel、θcm、ψcm为3类共9项热变形误差项,为俯仰调节机构转角,θy为方位调节机构转角,为卫星星体坐标系下的太阳矢量,为高精度数字式太阳敏感器cmos探测器坐标系下的太阳矢量。
25、优选地,所述步骤s3包括:
26、
27、将式中的θaz+θel变形量分别合并为θ1,则模型可简化为:
28、
29、经简化后,模型中共包含θ1、ψaz、ψel、θcm、ψcm7个变形误差项和θy两项二维机构转角,表示为:
30、优选地,所述步骤s4包括:调整二维机构空间指向,选择高精度数字式太阳敏感器视场内4个位置进行太阳矢量测量,对应二维指向机构方位、俯仰指向角得到数字太敏cmos探测器坐标系ocmxcmycmzcm下的4个太阳矢量4个太阳矢量测量位置应在保证精度条件下靠近高精度数字太敏视场边缘以扩大各矢量间夹角。
31、优选地,所述步骤s5包括:在高精度数字式太阳敏感器cmos探测器坐标系下建立方程组,分别将4组二维指向机构方位、俯仰指向角与数字太敏cmos探测器坐标系下4个太阳矢量代入方程(6)建立方程组,表示为:
32、
33、将上式展开,得:
34、
35、将上式改写为rscm=hxd的形式,式中:
36、rscm=[rscm1x,rscm1y,rscm2x,rscm2y,rscm3x,rscm3y,rscm4x,rscm4y]t
37、xd=[φaz,θ1,ψaz,ψel,φ3,θcm,ψcm]t
38、
39、利用最小二乘法解算该方程,有xd=(hth)-1htrscm,获得7个等效热变形参数,完成热变形辨识。
40、根据本发明提供的一种太阳观测二维指向机构热变形在轨辨识系统,包括:
41、模块m1:太阳观测二维指向机构变形误差项分析;
42、模块m2:太阳观测二维指向机构热变形严密几何模型建模;
43、模块m3:简化太阳观测二维指向机构热变形模型简化;
44、模块m4:太阳观测二维指向机构热变形参数在轨辨识;
45、模块m5:太阳观测二维指向机构热变形参数解算。
46、优选地,所述模块m1采用:
47、方位调节机构转轴支撑固连坐标系相对于卫星星体坐标系的变形,表示为:
48、
49、式中,θaz、ψaz分别为x、y、z三个方向的变形量。
50、俯仰调节机构转轴支撑固连坐标系相对于方位调节机构转轴支撑固连坐标系的变形,表示为:
51、
52、式中,θel、ψel分别为x、y、z三个方向的变形量。
53、高精度数字式太阳敏感器cmos探测器坐标系相对于俯仰调节机构转轴支撑固连坐标系的变形,表示为:
54、
55、式中,θcm、ψcm分别为x、y、z三个方向的变形量;
56、所述卫星星体坐标系:原点定义为卫星质心ob,在卫星零姿态时,卫星本体系与卫星轨道坐标系重合;
57、所述方位调节机构转轴支撑固连坐标系:原点oaz位于方位调节机构转轴支撑上,yaz轴与方位调节机构转轴平行,xaz轴与yaz轴垂直并指向俯仰调节机构转轴方向,zaz轴按右手法则确定;当方位调节机构位于0°位置时,在不存在变形的理想情况下,所述方位调节机构转轴支撑固连坐标系oazxazyazzaz与所述卫星星体坐标系obxbybzb三轴平行;
58、所述俯仰调节机构转轴支撑固连坐标系:原点oel位于俯仰调节机构转轴支撑上,xel轴与俯仰调节机构转轴平行,zel轴与xel轴垂直并指向太阳观测载荷尾部方向,yel轴按右手法则确定;当俯仰调节机构位于0°位置时,在不存在变形的理想情况下,所述俯仰调节机构转轴支撑固连坐标系oelxelyelzel与所述方位调节机构转轴支撑固连坐标系oazxazyazzaz三轴平行;
59、所述高精度数字式太阳敏感器cmos探测器坐标系原点ocm定义为太阳敏感器cmos探测器中心处,在未发生热变形时,太阳敏感器cmos探测器坐标系xcm轴,ycm轴,zcm轴分别与俯仰调节机构转轴支撑固连坐标系oelxelyelzel的三轴平行;
60、所述模块m2采用:建立包含从卫星星体坐标系到高精度数字太敏探测器坐标系全路径热变形传递过程的严密几何模型;
61、
62、式中,θaz、ψaz、θel、ψel、θcm、ψcm为3类共9项热变形误差项,为俯仰调节机构转角,θy为方位调节机构转角,为卫星星体坐标系下的太阳矢量,为高精度数字式太阳敏感器cmos探测器坐标系下的太阳矢量;
63、所述模块m3包括:
64、
65、将式中的θaz+θel变形量分别合并为θ1,则模型可简化为:
66、
67、经简化后,模型中共包含θ1、ψaz、ψel、θcm、ψcm7个变形误差项和θy两项二维机构转角,表示为:
68、优选地,所述模块m4包括:调整二维机构空间指向,选择高精度数字式太阳敏感器视场内4个位置进行太阳矢量测量,对应二维指向机构方位、俯仰指向角得到数字太敏cmos探测器坐标系ocmxcmycmzcm下的4个太阳矢量4个太阳矢量测量位置应在保证精度条件下靠近高精度数字太敏视场边缘以扩大各矢量间夹角;
69、所述模块m5包括:在高精度数字式太阳敏感器cmos探测器坐标系下建立方程组,分别将4组二维指向机构方位、俯仰指向角与数字太敏cmos探测器坐标系下4个太阳矢量代入方程(6)建立方程组,表示为:
70、
71、将上式展开,得:
72、
73、将上式改写为rscm=hxd的形式,式中:
74、rscm=[rscm1x,rscm1y,rscm2x,rscm2y,rscm3x,rscm3y,rscm4x,rscm4y]t
75、xd=[φaz,θ1,ψaz,ψel,φ3,θcm,ψcm]t
76、
77、利用最小二乘法解算该方程,有xd=(hth)-1htrscm,获得7个等效热变形参数,完成热变形辨识。
78、与现有技术相比,本发明具有如下的有益效果:本发明提供的太阳观测二维指向机构热变形在轨辨识方法针对太阳观测二维指向机构建立一套热变形严密几何模型,并通过在轨对太阳矢量测量完成等效热变形的辨识和解算,按照本发明提供的诊断方法,能够准确辨识出太阳观测二维指向机构变性参数,保证卫星太阳观测仪器在高精度数字太敏失效的情况下仍能精确指向太阳,确保太阳观测的有效性和卫星任务的完整性。
- 还没有人留言评论。精彩留言会获得点赞!