一种采集图像的校准处理方法、装置及介质与流程
本发明涉及图像处理,特别是涉及一种采集图像的校准处理方法、装置及介质。
背景技术:
1、现有的裁切设备在进行图像信息采样时,控制相机拍照的信号由机器上的编码器输出的触发信号,在材料输送时,柔性材料运动带动机器上从动滚轮转动,安装在从动滚轴上的编码器每旋转一周可以推送一定数量的脉冲信息。
2、在整个运动过程中,由于柔性材料与裁切设备的滚轴的摩擦程表以及外部其他电信号的干扰造成整个图像采集过程中的信号缺失,从而使得机器发出相同长度的送料信号,每次采集到的图像行数不同,且行数缺失伴有随机性,导致波动随机分布,产生的误差也随机。
3、因此,如何对采集到的图像进行图像处理以减少误差是本领域技术人员亟需要解决的。
技术实现思路
1、本发明的目的是提供一种采集图像的校准处理方法、装置及介质,在一次采集的基础上,进行二次校准,通过定位标签为依据,针对定位标签之间的图像区分分段式精度补偿,每个图像区域对应的补偿值不同,实现精准补偿以减少动态随机误差。
2、为解决上述技术问题,本发明提供一种采集图像的校准处理方法,包括:
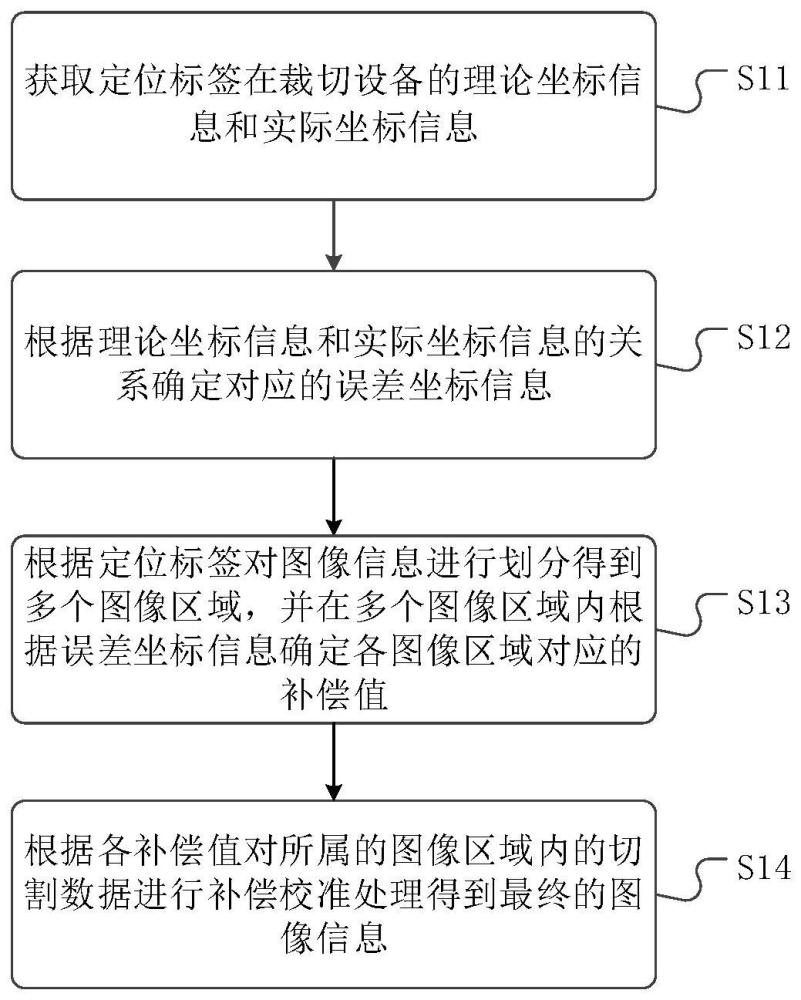
3、获取定位标签在裁切设备的理论坐标信息和实际坐标信息,其中,所述理论坐标信息通过线阵相机采集的图像信息与裁切设备的映射关系确定得到,所述实际坐标信息通过面阵相机采集得到,所述图像信息包括所述定位标签和待切割图像,所述定位标签位于所述待切割图像的一侧且垂直所述图像信息的坐标轴的x轴;
4、根据所述理论坐标信息和所述实际坐标信息的关系确定对应的误差坐标信息;
5、根据所述定位标签对所述图像信息进行划分得到多个图像区域,并在多个图像区域内根据所述误差坐标信息确定各图像区域对应的补偿值;
6、根据各补偿值对所属的图像区域内的切割数据进行补偿校准处理得到最终的图像信息,其中,所述切割数据由所述图像信息分析处理得到。
7、优选地,在所述获取定位标签在裁切设备的理论坐标信息和实际坐标信息之前,还包括:
8、获取所述裁切设备的目标对象的材质类型;
9、判断所述材质类型是否为变形类型;
10、若否,则根据所述定位标签对应的定位标签编码策略对所述目标对象在所述裁切设备处的图像信息进行补偿校准;
11、若是,则进入所述获取定位标签在裁切设备的理论坐标信息和实际坐标信息的步骤。
12、优选地,所述定位标签编码策略的确定过程,包括:
13、将多个定位标签在所述裁切设备处的所述目标对象的周围均匀放置,且设定唯一的定位标签编码;
14、对应地,所述根据所述定位标签对应的定位标签编码策略对所述目标对象在所述裁切设备处的图像信息进行补偿校准,包括:
15、在对所述目标对象送入所述裁切设备之前,确定各相邻定位标签之间的初始间距值;
16、在对所述目标对象送入所述裁切设备之后,确定各所述相邻定位标签之间的实际间距值,其中,送入所述裁切设备之前与送入所述裁切设备之后的间距值采集设备不同;
17、根据各所述初始间距值、各所述实际间距值与各所述定位标签编码的关系确定偏差定位标签和偏差值,并将所述偏差值作为所述偏差定位标签位于的所述目标对象对应的图像信息的补偿值;
18、根据所述补偿值对所述图像信息进行补偿校准得到最终的所述图像信息。
19、优选地,所述理论坐标信息的确定过程,包括:
20、获取由所述线阵相机进行行扫描采集的含有定位标签和待切割图像的图像信息;
21、对所述图像信息进行分析得到所述定位标签;
22、根据所述切割图像与所述裁切设备的映射关系确定所述定位标签在所述裁切设备的所述理论坐标信息。
23、优选地,所述根据所述理论坐标信息和所述实际坐标信息的关系确定对应的误差坐标信息,包括:
24、将所述理论坐标信息和所述实际坐标信息进行差值处理得到对应的所述误差坐标信息。
25、优选地,所述根据所述定位标签对所述图像信息进行划分得到多个图像区域,包括:
26、以所述定位标签的中心为参考点,平行于所述图像信息的x轴对所述图像信息进行划分得到多个所述图像区域。
27、优选地,所述定位标签的个数为多个时,所述图像区域的个数比所述定位标签的个数多一个,所述在多个图像区域内根据所述误差坐标信息确定各图像区域对应的补偿值,包括:
28、将首尾的定位标签对应分割的图像区域分别作为首个图像区域和最后一个图像区域;
29、将首个定位标签和最后一个定位标签各自对应的误差坐标信息的y轴信息分别作为首个图像区域和最后一个图像区域对应的补偿值;
30、将第n个定位标签与第n+1个定位标签各自对应的误差坐标信息的y轴信息加和处理并除以2得到的误差信息作为所述第n个定位标签与所述第n+1个标签对应的图像区域的补偿值,其中,所述第n个定位标签和所述n+1个定位标签除所述首个定位标签和最后一个定位标签之外的定位标签。
31、优选地,所述根据各补偿值对所属的图像区域内的切割数据进行补偿校准处理得到最终的图像信息,包括:
32、根据所述误差坐标信息确定待校准图像区域,并根据所述待校准图像区域确定对应的补偿值;
33、将所述补偿值与所述切割数据进行加和处理完成所述切割数据的补偿校准处理。
34、优选地,在所述根据所述理论坐标信息和所述实际坐标信息的关系确定对应的误差坐标信息之后,还包括:
35、获取所述切割数据内的当前采集点的理论坐标信息,其中,所述当前采集点位于以所述图像信息的坐标轴的y轴对所述定位标签的y轴分割的情况下每两个定位标签内采集的点;
36、根据所述当前采集点的理论坐标信息确定以所述当前采集点处的相邻定位标签的理论坐标信息;
37、调用补偿模型,输入所述当前采集点的理论坐标信息和所述当前采集点处的相邻定位标签的理论坐标信息;
38、获取所述补偿模型的输出值作为所述当前采集点的补偿值;
39、根据所述补偿值对所述当前采集点进行补偿校准处理。
40、优选地,所述补偿模型的确定过程,包括:
41、以机器原点为基点,以y轴为参考距离,在相邻所述定位标签内距离所述机器原点最近的确定为第一定位标签,距离所述机器原点最远的确定为第二定位标签;
42、将所述第一定位标签的理论坐标信息的x轴信息与所述第二定位标签的理论坐标信息的x轴信息进行差值处理确定第一差值信息;
43、将所述第一定位标签的误差坐标信息的x轴信息与所述第二定位标签的误差坐标信息的x轴信息进行差值处理确定第一误差信息;
44、将所述当前采集点的理论坐标信息的x轴信息与所述第二定位标签的理论坐标信息的x轴信息进行差值处理确定第二差值信息;
45、将所述第二差值信息对所述第一差值信息进行相除处理得到第一差值比例信息;
46、将所述第一差值比例信息与所述第二差值信息进行相乘处理得到第三差值信息;
47、将所述第三差值信息与所述第二定位标签的误差坐标信息的x轴信息进行相加处理得到所述当前采集点的补偿x轴信息;
48、将所述第一定位标签的理论坐标信息的y轴信息与所述第二定位标签的理论坐标信息的y轴信息进行差值处理确定第四差值信息;
49、将所述第一定位标签的误差坐标信息的y轴信息与所述第二定位标签的误差坐标信息的y轴信息进行差值处理确定第二误差信息;
50、将所述当前采集点的理论坐标信息的y轴信息与所述第二定位标签的理论坐标信息的y轴信息进行差值处理确定第五差值信息;
51、将所述第五差值信息对所述第四差值信息进行相除处理得到第二差值比例信息;
52、将所述第二差值比例信息与所述第五差值信息进行相乘处理得到第六差值信息;
53、将所述第六差值信息与所述第二定位标签的误差坐标信息的y轴信息进行相加处理得到所述当前采集点的补偿y轴信息;
54、根据所述当前采集点的补偿x轴信息和所述当前采集点的补偿y轴信息确定所述当前采集点的补偿值以确定所述补偿模型。
55、优选地,所述实际坐标信息的确定过程,包括:
56、预先对所述面阵相机进行标定处理;
57、将所述面阵相机放置于所述裁切设备的横梁处以完成所述面阵相机采集的数据为所述裁切设备的实际坐标信息;
58、控制所述面阵相机采取移动横梁方式采集所述定位标签,以获取所述实际坐标信息。
59、为解决上述技术问题,本发明还提供一种采集图像的校准处理装置,包括:
60、获取模块,用于获取定位标签在裁切设备的理论坐标信息和实际坐标信息,其中,所述理论坐标信息通过线阵相机采集的图像信息与裁切设备的映射关系确定得到,所述实际坐标信息通过面阵相机采集得到,所述图像信息包括所述定位标签和待切割图像,所述定位标签位于所述待切割图像的一侧且垂直所述图像信息的坐标轴的x轴;
61、第一确定模块,用于根据所述理论坐标信息和所述实际坐标信息的关系确定对应的误差坐标信息;
62、第二确定模块,用于根据所述定位标签对所述图像信息进行划分得到多个图像区域,并在多个图像区域内根据所述误差坐标信息确定各图像区域对应的补偿值;
63、补偿处理模块,用于根据各补偿值对所属的图像区域内的切割数据进行补偿校准处理得到最终的图像信息,其中,所述切割数据由所述图像信息分析处理得到。
64、为解决上述技术问题,本发明还提供一种采集图像的校准处理装置,包括:
65、存储器,用于存储计算机程序;
66、处理器,用于执行所述计算机程序时实现如上述所述的采集图像的校准处理方法的步骤。
67、为解决上述技术问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述所述的采集图像的校准处理方法的步骤。
68、本发明提供的一种采集图像的校准处理方法,包括:获取定位标签在裁切设备的理论坐标信息和实际坐标信息,其中,理论坐标信息通过线阵相机采集的图像信息与裁切设备的映射关系确定得到,实际坐标信息通过面阵相机采集得到,图像信息包括定位标签和待切割图像,定位标签位于待切割图像的一侧且垂直图像信息的坐标轴的x轴;根据理论坐标信息和实际坐标信息的关系确定对应的误差坐标信息;根据定位标签对图像信息进行划分得到多个图像区域,并在多个图像区域内根据误差坐标信息确定各图像区域对应的补偿值;根据各补偿值对所属的图像区域内的切割数据进行补偿校准处理得到最终的图像信息,其中,切割数据由图像信息分析处理得到。该方法在第一次采集图像过程中采用线阵相机采集,相对于现有的第一次采集过程使用面阵相机采集,线阵相机采集的图像分辨率和精度较高,减少干扰性。在一次采集的基础上,进行二次校准,通过定位标签为依据,针对定位标签之间的图像区分分段式精度补偿,每个图像区域对应的补偿值不同,实现精准补偿以减少动态随机误差。
69、另外,本发明还提供了一种采集图像的校准处理装置及介质,具有如上述采集图像的校准处理方法相同的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!