一种面向水下三维视觉测量的线激光曲面标定方法及系统
本发明属于水下三维测量领域,更具体地,涉及一种面向水下三维视觉测量的线激光曲面标定方法及系统。
背景技术:
1、水下三维测量在海洋资源开发、水下考古学、海洋生物学、水下机器人操作等领域具有广泛的应用需求。其中,水下线激光三维测量是一种主动式测量方法,通过选定特定波长的线激光可以减小水对激光的吸收和散射效应,提高图像的成像质量。采用振镜旋转将线激光投射到场景的不同位置进行测量为提高测量效率提供了新思路,这种方法不需要通过传感器额外的运动及配准工作即可重建得到小场景的三维点云信息。在水下线激光三维测量过程中,相机、激光器以及振镜都要进行集成密封,相机和激光器侧的相机射线和线激光平面会在透明视口处发生折射,因此传统线激光三角重建方法在水中进行三维重建会失效。为实现水下高精度线激光三维测量,关键在于线激光面参数以及密封视口参数的精确标定,实现相机光路以及线激光平面光路的折射补偿,最后根据水下三角测量原理完成三维重建。
2、为此,许多学者对水下高精度线激光三维重建展开了深入的理论方法研究,根据三维重建原理可划分为线-面三维重建和线-线三维重建。其中,线-面三维重建方法将线激光平面近似为由多束平行出射的激光射线组成的线激光平面,在经过折射仍为一个平面,没有考虑点出射式线激光平面在经过一次折射后发生弯曲这一过程,无法完全解决水下线激光三维测量精度受限于线激光曲面精确建模的难题。线-线三维重建方法将线激光平面离散为一根根激光射线,通过激光射线与相机射线求交的方式进行三维重建,但这种方法需要对激光聚焦点、相机侧视口、振镜侧视口、振镜镜面位姿等进行标定,此外,这些方法不仅繁琐耗时,在多参数标定过程中的误差传递效应还会很大程度上影响最终的三维重建精度。相应地,本领域中存在着发展一种考虑线激光射线入射角变化的点出射式线激光平面经折射后变成曲面的几何模型并提出相应的参数化拟合方法的技术需求。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种面向水下三维视觉测量的线激光曲面标定方法及系统,其目的在于,实现对扫描仪水下线激光曲面的参数化拟合,从而实现水下线激光曲面的准确标定。
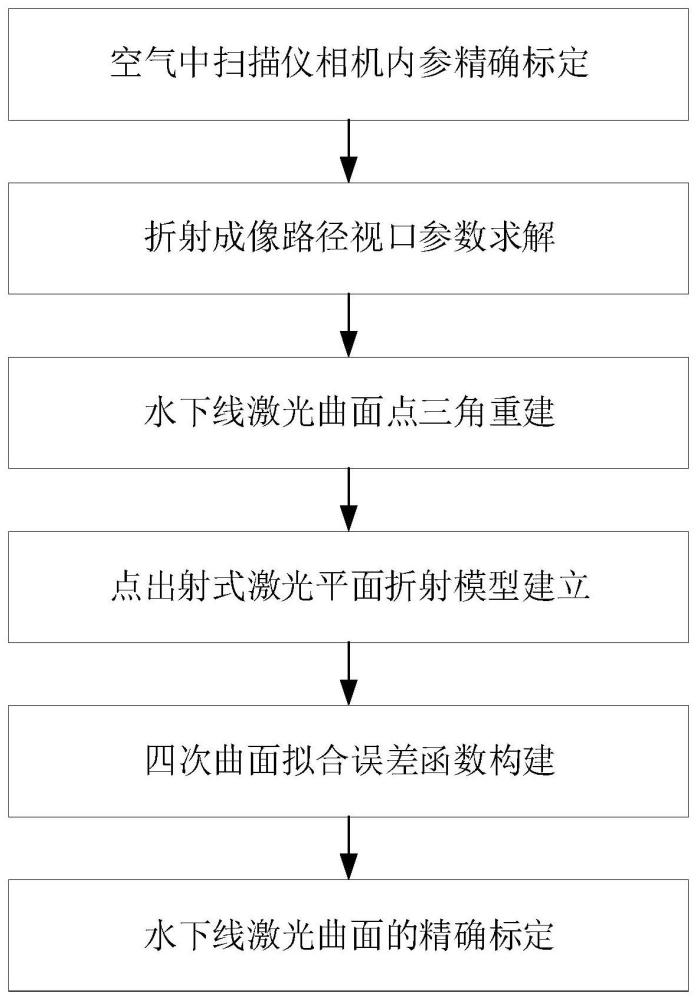
2、为实现上述目的,按照本发明的一方面,提出了一种面向水下三维视觉测量的线激光曲面标定方法,扫描仪密封在外壳中,扫描仪包括相机、振镜和激光器,标定过程包括如下步骤:
3、s1、在水下通过相机采集多个位姿下的棋盘格标定板的图像,即图像a,根据图像a上的棋盘格角点位置确定相机成像路径上的密封视口参数;密封视口参数包括相机光心到视口平面的距离d0以及视口平面的法向a;
4、s2、在水下通过振镜调整激光器出射线激光的角度,并通过相机采集多个位姿下的带线激光条纹的棋盘格标定板图像,即图像b;基于密封视口参数和图像b确定线激光曲面与棋盘格标定板的交点,即曲面点;
5、s3、构建关于线激光曲面的四次曲面拟合误差函数,并通过所述曲面点拟合得到四次曲面拟合误差函数中的系数,完成水下线激光曲面标定。
6、作为进一步优选的,步骤s2中,基于密封视口参数和图像b确定曲面点,包括如下步骤:
7、s21、从图像b中提取各个棋盘格角点坐标,进而计算得到水下棋盘格标定板坐标系{b}到扫描仪坐标系{s}的位姿变换矩阵
8、s22、从图像b中提取各个棋盘格标定板上线激光条纹中心位置pl,并根据相机内参矩阵k将其转换为空气中的相机射线
9、s23、基于密封视口参数和空气中的相机射线确定水中的相机射线
10、s24、根据水中的相机射线以及位姿变换矩阵通过求解空间射线与平面交点的方法求得曲面点。
11、作为进一步优选的,步骤s23,基于密封视口参数和空气中的相机射线确定水中的相机射线
12、
13、其中,λ表示水中的相机射线上的点与之间的距离,表示空气中的相机射线与视口平面的交点,表示水中的相机射线对应的方向向量,具体为:
14、
15、
16、其中,μ0表示空气的折射率,μ1表示水的折射率。
17、作为进一步优选的,步骤s1中,根据图像a上的棋盘格角点位置确定相机成像路径上的密封视口参数,包括如下步骤:
18、s11、从图像a中提取各个棋盘格角点坐标p,并根据相机内参矩阵k将其转换为空气中的相机射线v0:
19、v0=k-1[p 1]t
20、s12、根据相机成像路径上,空气中的相机射线v0、视口平面的法向a、相机光心和棋盘格角点的连线p三线共面,构建约束方程:
21、v0t(a×(rp+t))=0
22、其中,r和t分别表示棋盘格坐标系{b}到扫描仪坐标系{s}的位姿变换矩阵中的旋转矩阵和平移向量;
23、s13、根据相机成像路径中的折射共线约束,构建约束方程:
24、(rp+t-q1)×v1=0
25、
26、其中,v1为水中的相机射线,q1为视口平面处的折射点;
27、s14、根据s12和s13中的约束方程联立求解得到密封视口参数d0和a。
28、作为进一步优选的,步骤s1还包括如下步骤:
29、s15、以s14计算得到的密封视口参数作为初值,以棋盘格角点重投影误差最小为优化目标,优化得到密封视口参数最终值。
30、作为进一步优选的,所述相机内参矩阵k的确定方法如下:
31、预先在空气中通过相机采集多个位姿下的棋盘格标定板的图像,即图像c;基于图像c和相机标定算法计算得到相机内参矩阵k。
32、作为进一步优选的,所述线激光曲面指:以空气中的激光平面与视口平面的交线为水中线激光曲面的准线,以折射后的激光射线为水中线激光曲面的母线,通过准线和母线建立的直纹曲面即为所述线激光曲面;该线激光曲面是一种四次曲面。
33、作为进一步优选的,步骤s3中,构建的关于线激光曲面的四次曲面拟合误差函数j(c400,…,cpqr,…,c000)如下:
34、
35、其中,pi=[xi yi zi]t为线激光曲面上点i的坐标,n为待拟合曲面上点的总数;cpqr为四次曲面拟合误差函数中xpyqzr项的系数。
36、按照本发明的另一方面,提供了一种面向水下三维视觉测量的线激光曲面标定系统,包括处理器,所述处理器用于执行上述面向水下三维视觉测量的线激光曲面标定方法。
37、总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
38、1.本发明充分考虑点出射式线激光平面在经过一次折射后发生弯曲这一情况,并基于水下线激光曲面是一种四次直纹曲面,通过曲面点实现对扫描仪水下线激光曲面的参数化拟合;只需要将线激光扫描仪和棋盘格标定板放在水中进行数据采集即可对各个振镜转角下水中的线激光曲面进行标定,不需要制作额外的标定工具,突破了现有方法存在的瓶颈,具有成本低、操作简单、拟合精度高、适用范围广等优点。
39、2.本发明直接对各个振镜转角下对应的水下激光曲面进行标定,不需要考虑线激光器和振镜之间的装配误差,也不需要对扫描仪中振镜侧的视口进行标定,与现有技术中需要对激光聚焦点、相机侧视口、振镜侧视口、振镜镜面位姿进行标定的方法相比,可操作型更强,标定过程更简单,同时避免了多参数同时标定时求解误差的传递效应,标定精度更高,三维重建质量更好。
40、3.本发明给出了基于曲面点的四次曲面拟合方法,构造了四次曲面拟合误差函数,基于该误差函数可完成水下激光曲面参数的求解,实现扫描仪水下线激光曲面的精确标定,可用于线激光扫描仪的水下高精度三维成像。
- 还没有人留言评论。精彩留言会获得点赞!