基于S-G算法抑制传感器随机振动信号零漂趋势的方法与流程
本发明涉及一种基于s-g算法抑制传感器随机振动信号零漂趋势的方法,属于传感器信号分析处理。
背景技术:
1、振动加速度传感器作为信号采集的重要部件,其信号采集的准确性将进一步影响技术人员对工业器械工作状态的判断。传感器零漂现象是工业现场常见现象,如何实现零漂现象的抑制对于工业现场尤为重要。
2、近年来,随着传感器的国产替代逐步兴起,国内对于传感器出现的各类问题也展开了相应研究。传感器信号零漂现象在工业现场多呈现随机性和不确定性,在机械部件工作的过程中,无法对信号是否发生零漂做出判断,对于在线采集过程更是如此。对于传感器零漂现象的解决措施,现有方法多基于传感器自身结构、电缆、电路等方向进行优化,比如,基于传感器机械滤波抑制传感器零漂的方法,该方法通过特殊材料的研制实现传感器结构的改良,避免因传感器共振频率的激发引起信号零漂,此方法在冲击型传感器上具有理论的可行性,但国内还未见相应产品;在电缆方面,主要针对低噪声电缆及其连接方法进行研究和改进,避免了电噪声对传感器信号的影响,通过稳定可靠的连接方式,有效避免了由于连接不可靠导致的信号漂移;在电路方面,通过电路内部结构的改良,可在一定程度上避免零漂现象。另一方面,环境因素也会导致传感器信号产生漂移现象,已有研究证明,环境温度、湿度的改变,会增大传感器信号零漂的几率。环境因素作为信号采集不可避免的因素,研发人员针对不同工作环境已研制出高温、高压环境下的加速度传感器,在一定上避免了外界因素对传感器的影响。
3、值得指出的是:传感器信号零漂现象具有很强的随机性和不确定性,造成传感器零漂的因素众多,在实际工业场合中,很难及时准确的对零漂的造成因素做出判断,降低了技术人员的工作效率。另一方面,在现有工业场合的采集信号过程中,多为远程操控的作业,信号的优劣只能在采集结束后做出判断,无法在采集过程中判断信号是否零漂以及零漂程度,部分工业试车需要大量人力物力,若信号发生零漂,会造成实验结果无效,浪费大量人力物力。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于s-g算法抑制传感器随机振动信号零漂趋势的方法,解决了传感器零漂现象出现的随机性和不确定性问题,提高了工业零漂信号可利用性。
2、本发明采用以下技术方案:
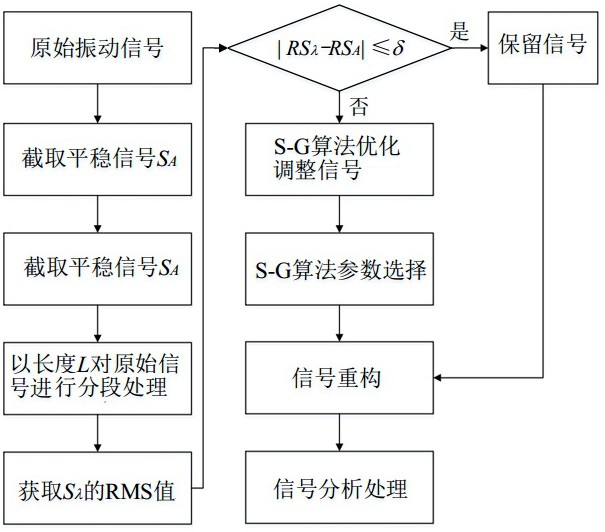
3、一种基于s-g算法抑制传感器随机振动信号零漂趋势的方法,包括如下步骤:
4、(1)截取长度为 l的平稳时域信号,记为,并计算的rms值,其计算式如下:
5、;
6、式中,|·|表示取绝对值运算;
7、(2)以长度 l对原始信号进行信号分段技术处理,每段信号分别记为, λ=1, 2,3,…, n,并计算的rms值,计算如下:
8、;
9、式中,表示每段信号包含的数据点数;
10、(3)采用绝对均方根差指标判断分段后的信号是否需要零漂抑制,绝对均方根差指标的计算如下:
11、;
12、式中, δ表示绝对均方根差指标,当与的绝对值小于等于 δ时,表明分段后的信号其波动趋势接近于平稳信号,可不做调整;当与的绝对值大于 δ时,表明分段后的信号其波动趋势与平稳信号存在差异,需要进一步对信号进行调整优化;
13、(4)s-g算法原理如下:
14、;
15、 ;
16、式中表示 i个数据点用一个 α次多项式拟合的结果, α表示阶次;,, …,表示每一项的系数; i个数据点由(- i, - i+1,…, i)构成,即 i=2 i+1,表示每个点对应的拟合结果,表示不同数据点对应的常数数值。
17、简化上述公式如下:
18、 ;
19、式中表示 s为(2 i+1)行、1列的矩阵,表示上述公式中的(2 i+1)行、 α列的矩阵,表示每一项系数构成的 α行、1列的矩阵,表示常数构成的(2 i+1)行、1列的矩阵。
20、由上述公式可解得
21、 ;
22、;
23、式中表示矩阵 b的最小二乘解,表示的滤波结果。
24、s-g算法的性能主要取决于窗长 w和阶次 α, w取奇数且要满足 w> α, α取3~6,为保证计算精度,取窗长,其中表示最小窗长,表示步进窗长,表示最大窗长;
25、(5)采用s-g算法调整零漂信号,具体为:
26、首先对发生零漂的每段,通过分步长调整s-g算法的性能,得到不同窗长对应的零漂信号的抑制曲线, j为的窗长调整次数, j=1, 2, 3, ……;分步长调整过程通过,,实现,从开始,步长为,直到达到;然后依次求取与的残差信号,进一步地获取对应的rms值;最后,求取rms值中的最小值,并以最小值所对应的作为零漂抑制的优化窗长,对应获取该优化窗长的残差信号作为零漂抑制后的信号;
27、本发明在确定残差信号时,通过分步长计算残差信号,取rms值中的最小值所对应的作为零漂抑制的优化窗长,得到针对每段的最优窗长,实现了s-g算法优化窗长的自适应选取;
28、(6)将调整信号与未调整信号整合,实现信号重构,呈现非零漂信号的正常波形。
29、优选的,为保证信号的截取有效程度,相对保留信号的完整性,步骤(1)中,当原始信号长度大于等于时, l按照以下公式确定:
30、;
31、式中,表示采样频率,单位hz, k表示 l和的倍数关系, k取1, 2, 3…, n;
32、当原始信号长度小于时, l按照以下公式确定:
33、。
34、优选的,步骤(3)中, δ取0.0001。
35、优选的,步骤(4)中,针对零漂信号的特点,在本算法研究中,为提高计算效率,取 α=3;
36、窗长 w取奇数且要满足 w> α,故取,;为进一步缩小窗长取值范围,建立与 l的关系如下:
37、;
38、由上式可以缩小窗长取值范围,为最接近于 l的奇数。
39、优选的,步骤(5)中,不同窗长对应的零漂信号的抑制曲线为:
40、 ;
41、式中,表示抑制曲线第 λ次平移后对应的数据矩阵;
42、与的残差信号,计算式如下与:
43、;
44、的计算式如下:
45、;
46、式中,表示所包含的数据点数;
47、rms值中的最小值求解计算式如下:
48、;
49、式中,arg min( )表示达到最小值时的取值。
50、优选的,步骤(6)中,重构后的信号为:
51、。
52、本发明未详尽之处,均可采用现有技术。
53、本发明的有益效果为:
54、1、工业信号采集前的准备周期较长,但是在采集过程中出现零漂现象易导致信号无效,为进一步提升信号采集的有效性并减少信号采集过程中出现的人力、财力浪费,本发明基于s-g算法抑制传感器信号零漂趋势的方法,在s-g算法的基础上,基于信号分段技术,结合残差信号和绝对均方根差指标,有效选取了s-g算法的优化窗长,实现了传感器零漂现象的有效抑制,通过仿真和实际信号验证可以看出,本发明可有效对零漂引起的信号波动进行有效抑制。
55、2、本发明的方法基于s-g算法进行零漂抑制研究,进一步拓展了s-g算法在工业领域的应用范围,s-g算法,可保证信号的长度和形状不发生变化,避免了滤波过程中有效信息的丢失。
56、3、s-g算法的优劣程度主要受到窗长大小影响,本发明所提的绝对均方根差指标实现了s-g算法优化窗长的自适应选取,避免了传统的人为因素选择的影响。
57、4、本发明提出的信号重构方法没有改变原有信号位置,在抑制零漂引起的波动的同时,最大程度保留了信号中的有效信息。
58、综上,本发明在采用s-g算法作为零漂趋势抑制方法的基础上,基于均方根值(rms)准则,优化选取适合的算法参数,有效提升s-g算法的计算效率,较大程度的保留原始信号中的有用信息,进一步实现传感器零漂现象的有效抑制,提升了原始信号的有效利用程度,解决了工业传感器在较强冲击下造成的传感器信号零漂导致信号失效的问题。
- 还没有人留言评论。精彩留言会获得点赞!