基于变邻域搜索的无人机与物流柜协同配送方法和系统
本发明涉及无人机配送,具体涉及一种基于变邻域搜索的无人机与物流柜协同配送方法、系统、存储介质和电子设备。
背景技术:
1、随着无人机技术的快速发展,无人机被越来越多的应用到物流领域。在该领域,一种新兴的基于智能物流柜(以下简称物流柜)的无人机配送模式逐渐出现在人们视野之中。在该模式中,以物流柜作为无人机的停机坪和电能补充平台,无人机在物流柜上自动完成货物的装载和卸载,通过物流柜和无人机协作完成货物配送。
2、在该模式下,当新的或更大的配送需求出现时,硬件上只需新建或增设物流柜并补充无人机即可,而无需补充大量的人力资源,因此具有较高的可扩展性。同时,该模式具备极高的自动化投递过程,进而提高了人员的安全系数,并且能避免因人员直接接触引发的社会矛盾,具有较高的应用价值。
3、然而,该模式也催生了新的调度管理问题,即如何基于数量有限的物流柜,对无人机进行调度,使得它们以更好的方式去执行物流配送任务。在无人机及配送任务数量较少的时候,调度人员可以根据经验快速的为每架无人机指定配送任务。但是配送任务规模的急剧增长迫切的需要物流配送企业提升管理效率,降低成本并提高服务质量。如何利用已建立的基于物流柜的无人机配送系统为客户提供方便快捷的配送服务,即为基于物流柜的无人机配送制定时间表,以便尽早完成给定的配送任务,成为了当下的研究热点之一。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于变邻域搜索的无人机与物流柜协同配送方法、系统、存储介质和电子设备,解决了当配送任务规模急剧增长时,如何快速高效地生成可行的无人机与物流柜协同配送方案的技术问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
5、一种基于变邻域搜索的无人机与物流柜协同配送方法,其特征在于,包括:
6、读取任务集合、物流柜集合、无人机集合以及每架无人机的初始停靠位置信息;
7、基于预设的编码规则随机生成初始解,调用解转换方法将所述初始解转换为可行解;
8、将所述可行解作为变邻域搜索算法的输入,基于预设的任务变换算子和无人机变换算子,迭代搜索获取各无人机的调度方案的全局最优解。
9、优选的,所述编码规则是指:
10、使用任务列表和无人机列表来表示一个解;其中,任务列表是任务的有序排列,表示任务调度的顺序,与任务列表对应有一个无人机列表,表示对应的每个任务由哪一架无人机执行。
11、优选的,定义任务集合为t={t1,t2,...,ti,...,t|t|}、物流柜集合l={l1,l2,...,lk,...,l|l|}、无人机集合d={d1,d2,...,dj,...,d|d|};其中,ti表示第i个任务,任务数量为|t|,dj表示第j个无人机,无人机数量为|d|,lk表示第k个物流柜,物流柜数量为|l|;
12、所述解转换方法包括:
13、步骤11、读取初始解;
14、步骤102、令i=1;
15、步骤103、判断i≤|t|是否成立,若是,转步骤104,否则转步骤120;
16、步骤104、获取初始解中第i个位置对应的任务t以及物流无人机d;
17、步骤105、判断任务t是否已经完成,若是,转步骤119,否则,转步骤106;
18、步骤106、判断任务t的投递物流柜lp上是否停靠有无人机d′,若是,转步骤107,否则转步骤112;
19、步骤107、判断任务t的接收物流柜lr上是否停靠有无人机d″,若是,转步骤108,否则转步骤111;
20、步骤108、判断初始解中第i个位置之后是否存在接收物流柜为lp,投递物流柜为lr,且未被执行的任务t′,若有多个任务满足条件,取第一个任务,若是,转步骤109,否则转步骤110;
21、步骤109、令无人机d′执行任务t,同时令无人机d″执行任务t′,转步骤119;
22、步骤110、令无人机d′执行任务t,同时令无人机d″空载从物流柜lr飞行至物流柜lp,转步骤119;
23、步骤111、令无人机d′执行任务t,转步骤119;
24、步骤112、判断任务ti的接收物流柜lr上是否停靠有无人机d″,若是,转步骤113,否则转步骤116;
25、步骤113、判断初始解中第i个位置之后是否存在接收物流柜为lp,投递物流柜为lr,且未被执行的任务t′,若有多个任务满足条件,取第一个任务,若是,转步骤114,否则转步骤115;
26、步骤114、令无人机d″先执行任务t′,然后立刻执行任务t,转步骤119;
27、步骤115、令无人机d″先空载从物流柜飞行至物流柜lp,然后执行任务t,转步骤119;
28、步骤116、判断初始解中第i个位置之后是否存在接收物流柜为无人机当前所在的物流柜l,投递物流柜为lr,且未被执行的任务t′,若有多个任务满足条件,取第一个任务,若是,转步骤117,否则,转步骤118;
29、步骤117、令无人机d先执行任务t′,然后立刻执行任务t,转步骤119;
30、步骤118、令无人机d先空载从物流柜l飞行至物流柜lp,然后执行任务t,转步骤119;
31、步骤119、令i=i+1,转步骤103;
32、步骤120、输出各无人机的调度方案的可行解。
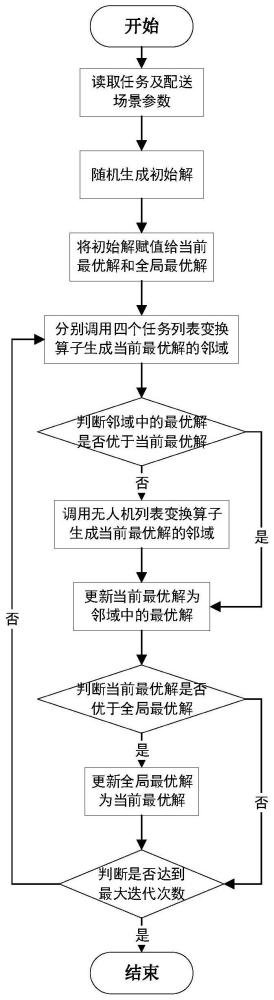
33、优选的,所述将所述可行解作为变邻域搜索算法的输入,基于预设的任务变换算子和无人机变换算子,迭代搜索获取各无人机的调度方案的全局最优解,包括:
34、步骤301、计算所述可行解θ0中所有任务的最大完工时间f(θ0);
35、步骤302、令当前最优解θ=θ0,f(θ)=f(θ0);以及令全局最优解θ*=θ0,f(θ*)=f(θ0);
36、步骤303、令迭代次数m=1;
37、步骤304、判断m<m是否成立,其中m表示最大迭代次数,若是,转步骤305,否则转步骤317;
38、步骤305、分别调用所述任务变换算子中的任务交换算子、任务插入算子、任务打包插入算子以及任务打包逆序算子输出当前最优解θ的邻域δ(θ);
39、步骤306、调用所述解转换方法将δ(θ)中所有的解转换为可行的无人机调度方案,并计算各方案的所有任务的最大完工时间;
40、步骤307、获取δ(θ)中对应的方案的最大完工时间最小的解θ′;
41、步骤308、判断f(θ′)<f(θ)是否成立,若是,转步骤309,否则转步骤310;
42、步骤309、更新当前最优解θ=θ′,同时f(θ)=f(θ′),转步骤314;
43、步骤310、调用所述无人机变换算子输出当前最优解θ的邻域γ(θ);
44、步骤311、调用所述解转换方法将γ(θ)中所有的解转换为可行的无人机调度方案,并计算各方案的所有任务的最大完工时间;
45、步骤312、获取γ(θ)中对应的方案的最大完工时间最小的解θ″;
46、步骤313、更新当前最优解θ=θ″,同时f(θ)=f(θ″);
47、步骤314、判断f(θ)<f(θ*)是否成立,若是,转步骤315,否则转步骤316;
48、步骤315、更新全局最优解θ*=θ,同时f(θ*)=f(θ);
49、步骤316、迭代次数m=m+1,转步骤304;
50、步骤317、输出解θ*对应的无人机调度方案。
51、优选的,所述步骤305具体包括:
52、令n1(δ(θ)),n2(δ(θ)),n3(δ(θ)),n4(δ(θ))分别表示调用任务交换算子、任务插入算子、任务打包插入算子以及任务打包逆序算子生成的邻域解的个数。
53、步骤30501、读取解θ;
54、步骤30502、构建一个空的邻域集合δ(θ),并令n=1;
55、步骤30503、判断n≤n1(δ(θ))是否成立,若是,转步骤30504,否则,转步骤30506;
56、步骤30504、在解θ上随机选择两个不同的位置,交换这两个位置的任务以及无人机生成新解,将新解添加到邻域集合δ(θ)中;
57、步骤30505、令n=n+1,转步骤30503;
58、步骤30506、令n=1;
59、步骤30507、判断n≤n2(δ(θ))是否成立,若是,转步骤30508,否则转步骤30510;
60、步骤30508、在解θ上随机选择一个任务t,随机选择一个非任务t紧前任务的另一个任务t′,将任务t及对应的无人机插入到任务t′之后生成新解,将新解添加到邻域集合δ(θ)中;
61、步骤30509、令n=n+1,转步骤30507;
62、步骤30510、令n=1;
63、步骤30511、判断n≤n3(δ(θ))是否成立,若是,转步骤30512,否则转步骤30514;
64、步骤30512、在解θ上随机选择m1个(m1<n)连续的任务随机选择一个非任务ti紧前任务的另一个任务t′,将任务及对应的无人机不改变顺序的插入到任务t′之后生成新解,将新解添加到邻域集合δ(θ)中;
65、步骤30513、令n=n+1,转步骤30511;
66、步骤30514、令n=1;
67、步骤30515、判断n≤n4(δ(θ))是否成立,若是,转步骤30516,否则转步骤30518;
68、步骤30516、在解θ上随机选择m2个(m2<n)连续的任务倒序排列这些任务及对应的无人机生成新解,将新解添加到邻域集合δ(θ)中;
69、步骤30517、令n=n+1,转步骤30515;
70、步骤30518、输出邻域集合δ(θ)。
71、优选的,所述步骤310具体包括
72、令n(γ(θ))表示调用无人机变换算子生成的邻域解的个数。
73、步骤31001、读取解θ;
74、步骤31002、构建一个空的邻域集合γ(θ),并令n=1;
75、步骤31003、判断n≤n(γ(θ))是否成立,若是,转步骤31004,否则,转步骤31006;
76、步骤31004、在解θ上随机选择一个位置,随机选择一架无人机替换掉该位置的无人机生成新解,将新解添加到邻域集合γ(θ)中;
77、步骤31005、令n=n+1,转步骤31003;
78、步骤31006、输出邻域集合γ(θ)。
79、一种基于变邻域搜索的无人机与物流柜协同配送系统,包括:
80、读取模块,用于读取任务集合、物流柜集合、无人机集合以及每架无人机的初始停靠位置信息;
81、初始化模块,用于基于预设的编码规则随机生成初始解,调用解转换方法将所述初始解转换为可行解;
82、搜索模块,用于将所述可行解作为变邻域搜索算法的输入,基于预设的任务变换算子和无人机变换算子,迭代搜索获取各无人机的调度方案的全局最优解。
83、一种存储介质,其存储有用于基于变邻域搜索的无人机与物流柜协同配送的计算机程序,其中,所述计算机程序使得计算机执行如上所述的无人机与物流柜协同配送方法。
84、一种电子设备,包括:
85、一个或多个处理器;存储器;以及一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述程序包括用于执行如上所述的无人机与物流柜协同配送方法。
86、(三)有益效果
87、本发明提供了一种基于变邻域搜索的无人机与物流柜协同配送方法、系统、存储介质和电子设备。与现有技术相比,具备以下有益效果:
88、本发明中,首先读取任务集合、物流柜集合、无人机集合以及每架无人机的初始停靠位置信息;然后基于预设的编码规则随机生成初始解,调用解转换方法将所述初始解转换为可行解;最后将所述可行解作为变邻域搜索算法的输入,基于预设的任务变换算子和无人机变换算子,迭代搜索获取各无人机的调度方案的全局最优解。实现快速高效地生成可行的无人机与物流柜协同配送方案,并使得所有的任务尽可能早的配送完成。
- 还没有人留言评论。精彩留言会获得点赞!