臂架系统结构优化方法、装置、计算设备及工程机械与流程
本技术涉及工程机械,具体地涉及一种臂架系统结构优化方法、装置、计算设备及工程机械。
背景技术:
1、对于工程机械,例如混凝土泵车而言,随着市场的激烈竞争,客户更倾向于选择米段更长、泵送过程移车频次低,工作效率高、施工更灵活、能耗低的泵车。打造合规、低成本、高可靠性的超长米段泵车是各泵车企业目前最关注的问题。泵车的臂架系统重量越轻,可设计长度越长,整车上装负荷越小,整车稳定性越高。因此,提高臂架系统轻量化水平至关重要。
2、另外,由于臂架系统在泵送过程中,由于液压系统本身引起的冲击和混凝土负载变化引起的冲击,导致臂架系统发生振动,臂架末端轨迹多变,影响泵送效率和稳定性。
3、因此,亟需一种对臂架系统进行结构优化的方法,既要尽可能实现臂架轻量化,又要减小臂架系统振动。
技术实现思路
1、本技术实施例的目的是提供一种臂架系统结构优化方法、装置、计算设备及工程机械,用以对臂架系统进行结构优化,以解决或至少部分解决上述问题。
2、为了实现上述目的,本技术第一方面提供一种臂架系统结构优化方法,包括:
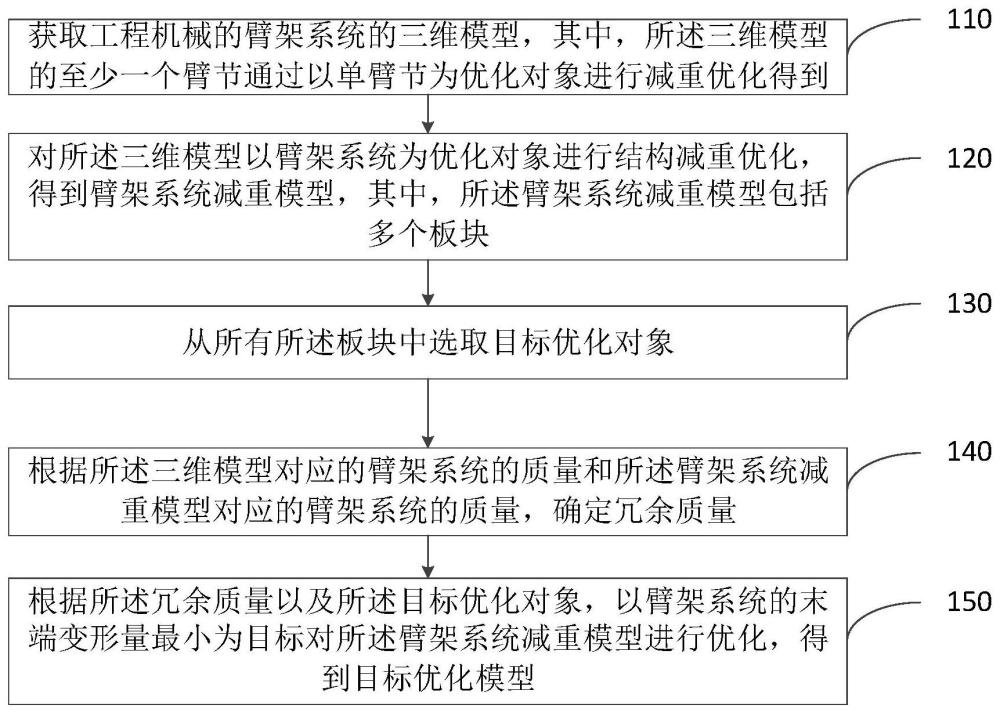
3、获取工程机械的臂架系统的三维模型,其中,三维模型的至少一个臂节通过以单臂节为优化对象进行减重优化得到;
4、对三维模型以臂架系统为优化对象进行结构减重优化,得到臂架系统减重模型,其中,臂架系统减重模型包括多个板块;
5、从所有板块中选取目标优化对象;
6、根据三维模型对应的臂架系统的质量和臂架系统减重模型对应的臂架系统的质量,确定冗余质量;
7、根据冗余质量以及目标优化对象,以臂架系统的末端变形量最小为目标对臂架系统减重模型进行优化,得到目标优化模型。
8、在本技术实施例中,对三维模型以臂架系统为优化对象进行结构减重优化,得到臂架系统减重模型,包括:
9、根据三维模型,构建臂架系统的有限元模型;
10、根据有限元模型,以臂架系统的单元密度为第一设计变量,以臂架系统的最小质量为第一目标函数,以臂架工作应力小于预设应力阈值为第一约束条件,构建臂架系统在不同臂架姿态类别下的第一优化数学模型;
11、对每个第一优化数学模型进行求解,确定每个臂架姿态类别下的初始臂架系统减重模型;
12、根据优化解交集选取原则对每个臂架姿态类别下的初始臂架系统减重模型,确定所有臂架姿态类别下的第一优化解交集,作为臂架系统减重模型。
13、在本技术实施例中,第一约束条件还包括减重模型臂架系统末端变形量小于等于预设变形量阈值。
14、在本技术实施例中,从所有板块中选取目标优化对象,包括:
15、将每个板块划分为多个独立区域;
16、以多个独立区域的板厚为第二设计变量,以臂架系统的末端变形量最小为第二目标函数,以臂架系统质量小于等于臂架系统减重模型对应的臂架系统的总质量为第二约束条件,构建臂架系统在不同臂架姿态类别下的第二优化数学模型;
17、对每个第二优化数学模型进行求解,得到每个独立区域板厚变量在每个臂架姿态类别下相对于臂架系统的末端变形量灵敏度系数及质量灵敏度系数;
18、根据优化解交集选取原则,选取每个臂架姿态类别下末端变形量灵敏度系数大于第一系数阈值且重量灵敏度系数小于第二系数阈值的独立区域作为目标优化对象。
19、在本技术实施例中,将每个板块划分为多个独立区域,包括:
20、将每个板块划分为连接区域和非连接区域,其中,连接区域为每个板块与其他板块的连接处;
21、针对每个板块,将连接区域划分为第一数量个独立区域,将非连接区域划分为第二数量个独立区域,其中,第一数量大于第二数量。
22、在本技术实施例中,方法还包括:
23、根据预设权重将冗余质量划分为至少一个目标增重质量;
24、根据冗余质量以及目标优化对象,以臂架系统的末端变形量最小为目标对臂架系统减重模型进行优化,得到目标优化模型,包括:
25、根据至少一个目标增重质量、至少一个目标增重质量的预设优先级次序以及目标优化对象,以臂架系统的末端变形量最小为目标对臂架系统减重模型进行优化,得到目标优化模型。
26、在本技术实施例中,预设权重根据遗传算法确定。
27、在本技术实施例中,多个目标增重质量的预设优先级次序根据预设权重确定。
28、在本技术实施例中,多个目标增重质量包括尺寸优化增重质量、形貌优化增重质量及隔板设计优化增重质量。
29、在本技术实施例中,根据多个目标增重质量、多个目标增重质量的预设优先级次序以及目标优化对象对臂架系统减重模型进行优化,得到目标优化模型,包括:
30、对臂架系统减重模型基于目标优化对象和尺寸优化增重质量进行板厚尺寸优化,得到臂架系统尺寸优化模型;
31、对臂架系统尺寸优化模型基于目标优化对象和形貌优化增重质量进行形貌优化,得到臂架系统形貌优化模型;
32、对臂架系统形貌优化模型基于目标优化对象和隔板设计优化增重质量进行隔板设计优化,得到臂架系统隔板设计优化模型,作为目标优化模型。
33、在本技术实施例中,对臂架系统减重模型基于目标优化对象和尺寸优化增重质量进行板厚尺寸优化,得到臂架系统尺寸优化模型,包括:
34、以臂架系统减重模型中的多个独立区域的质量为第三设计变量,以臂架系统的末端变形量最小为第三目标函数,以臂架系统的质量小于等于臂架系统减重模型对应的臂架系统的质量与尺寸优化增重质量之和为第三约束条件,构建臂架系统在不同臂架姿态类别下的第三优化数学模型;
35、对每个第三优化数学模型进行求解,确定每个臂架姿态类别下的初始臂架系统尺寸优化模型;
36、根据优化解交集选取原则对每个臂架姿态类别下的初始臂架系统尺寸优化模型,确定所有臂架姿态类别下的第二优化解交集,得到臂架系统尺寸优化模型。
37、在本技术实施例中,对臂架系统尺寸优化模型基于目标优化对象和形貌优化增重质量进行形貌优化,得到臂架系统形貌优化模型,包括:
38、以臂架系统尺寸优化模型中的多个独立区域的质量为第四设计变量,以臂架系统的末端变形量最小为第四目标函数,以臂架系统的质量小于等于臂架系统减重模型对应的臂架系统的质量、尺寸优化增重质量及形貌优化增重质量之和为第四约束条件,构建臂架系统在不同臂架姿态类别下的第四优化数学模型;
39、对每个第四优化数学模型进行求解,确定每个臂架姿态类别下的初始臂架系统形貌优化模型;
40、根据优化解交集选取原则对每个臂架姿态类别下的初始臂架系统形貌优化模型,确定所有臂架姿态类别下的第三优化解交集,得到臂架系统形貌优化模型。
41、在本技术实施例中,对臂架系统形貌优化模型基于目标优化对象和隔板设计优化增重质量进行隔板设计优化,得到臂架系统隔板设计优化模型,作为目标优化模型,包括:
42、以臂架系统形貌优化模型中的多个独立区域的质量为第五设计变量,以臂架系统的末端变形量最小为第五目标函数,以臂架系统的质量小于等于臂架系统减重模型对应的臂架系统的质量、尺寸优化增重质量、形貌优化增重质量及隔板设计优化增重质量之和为第五约束条件,构建臂架系统在不同臂架姿态类别下的第五优化数学模型;
43、对每个第五优化数学模型进行求解,确定每个臂架姿态类别下的初始臂架系统隔板设计优化模型;
44、根据优化解交集选取原则对每个臂架姿态类别下的初始臂架系统隔板设计优化模型,确定所有臂架姿态类别下的第四优化解交集,得到臂架系统隔板设计优化模型,作为目标优化模型。
45、在本技术实施例中,优化解交集选取原则包括:
46、对每个臂架姿态类别下的优化解求交集;
47、在每个臂架姿态类别下的优化解不存在交集的情况下,剔除比重最小的臂架姿态类别对应的优化解,并重复执行对每个臂架姿态类别下对应的模型的优化解求交集的步骤,直至得到优化解交集,其中,每个臂架姿态类别的比重根据实际工况确定。
48、在本技术实施例中,优化解交集选取原则包括:
49、针对每个臂架姿态类别,获取工作时间占比超过预设占比阈值的臂架姿态的优化解求交集;
50、在每个臂架姿态类别下的工作时间占比超过预设占比阈值的臂架姿态的优化解不存在交集的情况下,剔除比重最小的臂架姿态类别对应的优化解,并重复执行针对每个臂架姿态类别,获取工作时间占比超过预设占比阈值的臂架姿态的优化解求交集,直至得到优化解交集,其中,每个臂架姿态类别的比重根据实际工况确定。
51、本技术第二方面提供一种臂架系统结构优化装置,包括:
52、存储器,被配置成存储指令;以及
53、处理器,被配置成从所述存储器调用所述指令以及在执行所述指令时能够实现根据第一方面所述的臂架系统结构优化方法。
54、本技术第三方面提供一种计算设备,包括:
55、根据第二方面所述的臂架系统结构优化装置。
56、本技术第四方面提供一种工程机械,工程机械的臂架系统通过第一方面所述的臂架系统结构优化方法得到。
57、本技术第五方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据第一方面所述的臂架系统结构优化方法。
58、通过上述技术方案,在对至少一个臂节通过以单臂节为优化对象进行减重优化得到臂架系统三维模型后,再对三维模型以臂架系统为优化对象进行结构二次减重优化,并对第二次减重优化时的冗余质量进行重新分配,用于减少臂架末端变形量,由此既通过以单臂节为优化对象进行减重优化保证了臂架系统的轻量化,又通过将冗余质量重新分配减小了臂架振动。
59、本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!