基于虚拟三维技术的装备维修训练模拟系统的制作方法
本发明涉及装备维修培训,特别涉及一种基于虚拟三维技术的装备维修训练模拟系统。
背景技术:
1、大型复杂设备具有价值高、体积大、设备重等特点。特别是搬运或者维修过程中有些设备需要拆解和安装,尤其有些设备有密封件,在拆解和安装时应特别注意,机械密封是转动机械本体密封有效的方式之一,其本身加工的精度比较高,尤其是动、静环,如果拆装方法不合适或使用不当,装配后的机械密封不但达不到密封的目的,而且会损坏集结的密封元件。因此大型复杂设备维修过程中需要十分小心精细的操作,而由于设备成本问题导致大型复杂设备维修无法轻易进行实操,因而大型复杂设备维修学习和维修训练就显得尤为重要,但是传统基于文字、图片和视频数据的维修训练仅为知识层面的学习,往往无法达到理想的训练效果,因此本发明提出一种基于虚拟三维技术的装备维修训练模拟系统。
技术实现思路
1、本发明提供一种基于虚拟三维技术的装备维修训练模拟系统,能够将大型复杂设备真实的故障处理现场环境、故障处理过程的快速、智能、高效地三维化,生成多场景动态装备维修三维模型,服务于运维人员,方便运维人员作为训练模拟人随时进行维修学以及维修训练,有效减低运维人员线下培训的时间成本,同时为训练模拟人提供接近真实场景的训练环境,有利于提高维修人员临场维修能力,并且分阶段维修训练实现了对维修人员的个性化针对性训练,可以有效的针对性的提高运维人员的维修能力,减少维修中的失误,减低企业运维成本。
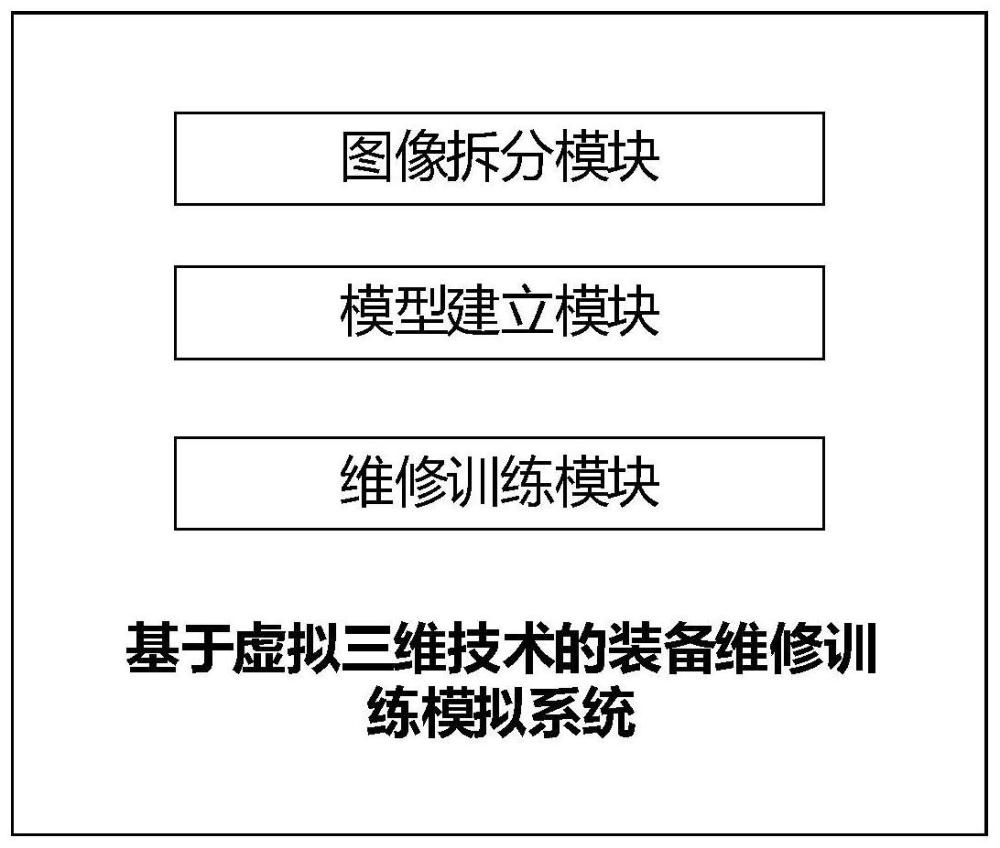
2、本发明提供一种基于虚拟三维技术的装备维修训练模拟系统,包括:
3、图像拆分模块,用于获取多种大型复杂设备维修现场的多角度录制视频和图片,将录制视频和图片,根据维修流程对多角度录制视频和图片进行拆分,获得多个类别的图像集,
4、其中,图像集包括设备维修环境、设备本身、设备部件拆卸或更换以及维修人员维修行为四类;
5、模型建立模块,用于基于多个类别的图像集,建立目标训练设备对应的多场景动态装备维修三维模型;
6、维修训练模块,用于在检测到训练模拟人的训练请求后,基于多场景动态装备维修三维模型对目标训练设备进行维修重现,或者在多场景动态装备维修三维模型上进行分阶段维修训练。
7、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,图像拆分模块,包括:
8、资料获取单元,用于基于视频标签,对大型复杂设备维修现场的多角度录制视频和图片进行分类,建立多个数据文件夹,存储至数据库中,其中视频标签包括了设备名称、设备维修环境以及设备故障原因;
9、识别分类单元,用于分别对各个数据文件夹中的多角度录制视频和图片进行逐帧图像识别,并基于目标标记框对相关物品进行标记,根据标记结果,对帧图像进行分类,在当前数据文件夹中建立多个类别的图像集。
10、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,模型建立模块,包括:
11、环境模型建立单元,用于基于目标训练设备对应的设备名称在数据库中进行检索,获取目标训练设备对应的多个设备维修环境图像集,采用设备维修环境图像集对应预设模型进行训练,建立目标训练设备对应的多种维修环境三维模型;
12、设备模型建立单元,用于基于目标训练设备对应的设备名称在数据库中进行检索,获取目标训练设备对应的多种维修环境下的多个设备本身图像集,并获取目标训练设备对应的设备构造图,基于设备构造图,结合多个设备本身图像集建立目标训练设备对应的设备三维模型;
13、零件模型建立单元,用于基于目标训练设备对应的设备三维模型建立模型文件,存储至数据库中,并基于设备构造图,对三维模型进行零件拆分,根据零件拆分结果,对模型文件进行文件拆分,获得多个模型子文件,每个模型子文件对应一个设备零件三维模型。
14、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,零件模型建立单元,包括:
15、工具模型建立子单元,用于对目标训练设备的对应全部多角度录制视频和图片进行遍历,确定全部维修使用工具,并获取维修使用工具对应的工具数据,基于工具数据建立辅助工具模型,生成工具模型文件,存储至数据库中。
16、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,模型建立模块,还包括:
17、第一模型组合单元,用于将分别将多种维修环境三维模型于设备三维模型进行组合,生成多场景三维模型;
18、三维轨迹建立单元,用于获取目标训练设备对应的多个维修人员维修行为图像集,根据维修人员维修行为图像集携带的维修环境标签以及设备故障原因,对多个维修人员维修行为图像集进行分类,获得多个组图集合;
19、分别基于各个组图集合对维修人员的维修轨迹进行确定,并基于维修轨迹中的零件拆卸或更换结果,向维修轨迹进行维修节点添加;
20、获取每个维修阶段对应的目标设备部件拆卸或更换图像集,对目标设备部件拆卸或更换图像集进行特征识别,获拆卸或更换零件对应的零件特征,基于零件特征确定每个维修节点对应的目标零件,与对应的模型子文件建立管理关系添加至对应的维修节点,并根据维修轨迹对目标零件进行移动,生成三维维修动态轨迹;
21、第二模型组合单元,用于将三维维修动态轨迹与对应的场景三维模型进行组合,生成多场景动态装备维修三维模型。
22、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,三维轨迹建立单元,包括:
23、动作模拟子单元,用于基于时间轴对维修轨迹对应的目标设备部件拆卸或更换图像集中的图像进行排序,获得图像序列;
24、根据图像序列分别对维修人员动作进行定位,确定维修轨迹中维修人员的拆卸或者更换零件的操作姿势以及拆卸以及更换零件的辅助工具,基于图像序列对全部操作姿势进行连贯性排列,获得姿势变化;
25、基于时间轴在所述姿势变化中,获取对应的工具模型子文件,生成对应辅助工具三维模型,添加至维修人员对应的姿势位置处,生成维修动态变化,
26、将所述维修动态变化添加至三维维修动态轨迹中,生成最终三维维修动态轨迹,发送至第二模型组合单元。
27、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,维修训练模块,包括:
28、训练选择单元,用于训练模拟人对模拟维修场景、模拟维修设备以及维修故障进行选择;
29、模型获取单元,用于根据训练模拟人的选择结果,生成对应的训练开放控制指令,根据训练开放指令,打开对应维修场景的多场景动态装备维修三维模型;
30、指令生成单元,用于按照训练模拟人的选择的训练模式生成对应的训练控制指令,当训练模式为第一模式时,生成重现训练指令,并发送至维修重现单元;
31、当训练模式为第二模式时,生成自主训练指令,并发送至自主训练单元。
32、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,维修训练模块,还包括:
33、维修重现单元,用于在接收到重现训练指令后,根据训练设置信息,控制对应维修场景的多场景动态装备维修三维模型对目标训练设备的维修过程进行维修重现;
34、自主训练单元,用于在接收到自主训练指令后,对训练请求信息进行解析,确定训练模拟人自主训练对应的目标维修阶段,获取目标维修阶段对应的对应维修场景的多场景动态装备维修三维模型的阶段维修模型,并对阶段维修模型进行维修操作隐藏后发送至训练模拟人的训练操作界面。
35、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,自主训练单元,包括:
36、动作获取单元,用于基于操作辅助设备,获取训练模拟人的维修操作,并生成实时维修操作动作在训练模拟人操作界面进行同步显示;
37、速度确定单元,用于获取操作辅助设备的实时移动变换速度,基于实时移动变换速度确定训练模拟人实时维修速度;
38、同步对比单元,用于基于实时维修速度,对隐藏维修操作的变换速度进行实时调节,根据调节后的隐藏维修操作,结合维修时间对应关系,获取实时维修操作动作对应的隐藏动作;
39、将实时维修操作动作与其对应的隐藏动作进行对比,获得维修相似度,并在维修相似度小于等于预设值时,生成维修错误提醒,并进行红色维修错误标记。
40、优选的,在一种基于虚拟三维技术的装备维修训练模拟系统中,同步对比单元,包括:
41、动作定位子单元,用于对每个实时维修操作动作及其对应的隐藏动作进行动作定格,生成动作对比图像,基于动作对比图像借助目标训练设备各个零件之间的几何关系,确定训练模拟人当前实时维修操作位置以及操作角度;
42、动作对比子单元,用于将训练模拟人当前实时维修操作位置以及操作角度,分别与隐藏动作对应的操作位置以及操作角度进行对比,获得操作位置相似度以及操作角度相似度,基于第一预设权重、操作位置相似度以及操作角度相似度获得维修相似度;
43、其中,操作位置相似度对应的权重大于操作位置相似度对应的权重。
44、与现有技术相比,本发明至少存在以下有益效果:
45、本发明通过图像拆分模块获取多种大型复杂设备维修现场的多角度录制视频和图片,将录制视频和图片,根据维修流程对多角度录制视频和图片进行拆分,获得多个类别的图像集,实现了影像资料的自动分类,为多场景动态装备维修三维模型的分布建立提供基础;通过模型建立模块基于多个类别的图像集,建立目标训练设备对应的多场景动态装备维修三维模型,将大型复杂设备真实的故障处理现场环境、故障处理过程进行三维化,实现了维修训练资料的立体呈现,方便大型复杂设备维修过程中细节的良好呈现,有利于提高维修训练的精准度;通过维修训练模块在检测到训练模拟人的训练请求后,基于多场景动态装备维修三维模型对目标训练设备进行维修重现,或者在多场景动态装备维修三维模型上进行分阶段维修训练,方便训练模拟人随时进行维修学习以及维修训练,有效减低运维人员线下培训时间成本,同时为训练模拟人提供接近真实场景的训练环境,有利于提高维修人员临场维修能力,并且分阶段维修训练实现了对维修人员的个性化针对性训练,可以有效的针对性的提高运维人员的维修能力,减少维修中的失误,减低企业运维成本。
46、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在本技术文件中所特别指出的结构来实现和获得。
47、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!