基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法
本发明属于多拦截弹协同拦截机动目标的制导,特别是涉及基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法。
背景技术:
1、高超声速拦截弹是指飞行速度大于5ma、突防能力强、具有重要军事价值和经济价值的一类导弹。因应现代新型突防进攻武器的挑战,传统的单一拦截制导方法显示出其局限性。这种背景促使研究者们对多导弹协同拦截制导技术的研究兴趣日益增加。与单一导弹拦截相比,这些多导弹协同拦截策略已被证实具有更高的效率和有效性。多导弹协同为克服传统拦截技术所面临的限制提供了希望且可行的解决方案。本发明所述方法旨在提高对机动目标进行多导弹协同打击的成功可能性,在这种情况下,目标和导弹都拥有相当的过载能力。目标是最大限度地发挥多导弹协同的优势。
技术实现思路
1、本发明目的是为了解决实际飞行中高超声速强机动目标难以拦截问题,提出了基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法。
2、本发明是通过以下技术方案实现的,本发明提出基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法,所述方法包括以下步骤:
3、步骤一:建立三维高超声速拦截弹动力学模型,得到三维协同动力学方程;
4、步骤二:基于步骤一所述的三维协同动力学方程,得到新的精确零控脱靶量,设计三维多导弹协同博弈性能成本函数;
5、步骤三:利用哈里斯鹰粒子群优化算法,得到最优决策制导指令;
6、步骤四:结合前几步设计的模型与制导律,进行三维多导弹协同拦截仿真实验分析。
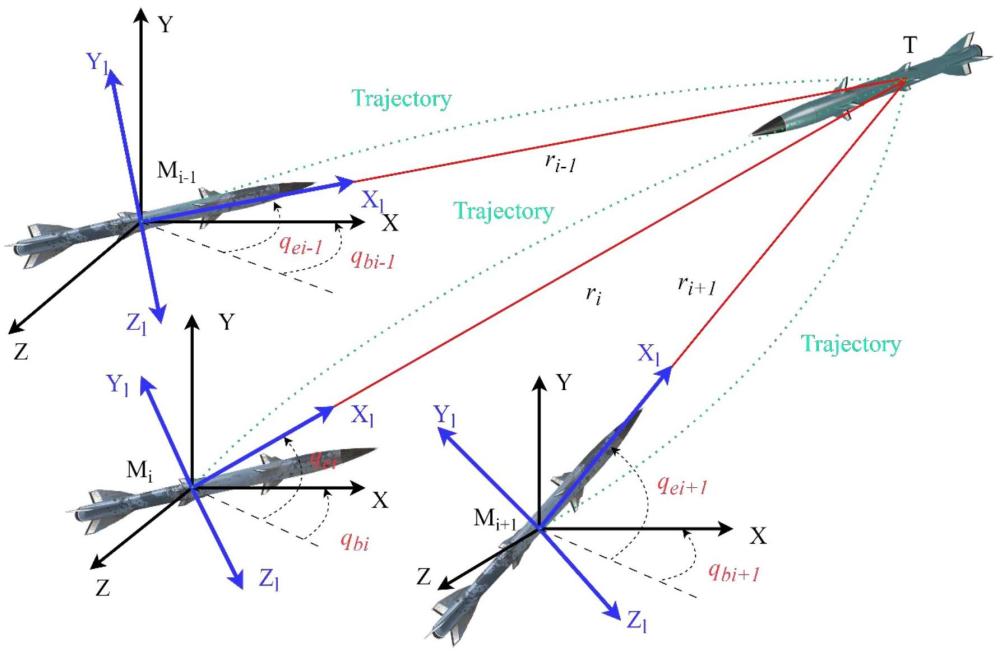
7、进一步地,在步骤一中,定义oxyz表示惯性坐标系,olxlylzl表示视线坐标系,mi和ti分别表示第i个拦截器和机动目标,ri表示第i个拦截器和机动目标之间的相对距离;qei和qbi分别表示第i个拦截器和机动目标之间的视线倾角和视线偏角;第i个拦截器的加速度和机动目标的加速度分别是ami和ati;
8、
9、根据coriolis定理,得到机动目标第i个拦截器的相对速度矢量在视线坐标系olxlylzl中的投影为
10、再次利用coriolis定理,可得机动目标第i个拦截器相对加速度矢量在视线坐标系olxlylzl中的投影为
11、
12、其中,dvmi/dt表示机动目标第i个拦截器相对速度矢量相对惯性坐标系的绝对变化率在视线坐标系中的投影,ω表示los坐标系和惯性坐标系之间的角旋转率,定义如下:
13、
14、联立方程(2),(3)和(4)可得三维的机动目标第i个拦截器相对运动的动力学方程为:
15、
16、进一步地,在步骤一中,令和则机动目标第i个拦截器相对运动方程(5)可以重新表示为:
17、
18、在式(6)中,vri为机动目标第i个拦截器相对速度矢量的径向分量,称vri为目标第i个拦截器接近速度;vei和vbi分别为目标第i个拦截器相对速度矢量在纵向平面内和侧向平面内的切向分量;在末制导过程中,导弹和目标在纵轴方向都没有额外的推力,因此,vri是不可控的,由于需要估计第i个拦截器当前剩余拦截时间tgoi,则在三维空间里重新表示第i个拦截器的拦截问题,θi和φi表示vmi与视线方向的夹角,t0是机动目标在惯性坐标系下的xz的投影,表示机动目标的速度与平面mitt0所成的夹角。
19、进一步地,在步骤二中,第i个拦截器与速度前置角λi被如下方程(7)表示:
20、λi=cosφicosθi (7)
21、目标的加速度向量at垂直于目标速度vt,定义机动目标坐标系xvyvzv,xv指向机动目标的速度方向,yv指向机动目标的加速度方向,zv根据右手定则决定;机动目标在惯性坐标系下的速度和加速度分别为vt=[vxt,vyt,vzt]t和at=[axt,ayt,azt]t;由惯性坐标系到机动目标坐标系的转换举证被如下方程定义:
22、cv=cv1cv2 (8)
23、其中
24、
25、
26、方程(8)中的φt,θt由下面方程(9)得到:
27、
28、其中
29、
30、进一步地,在机动目标坐标系,第i个拦截器的位置以及速度分别定义为[xmvi,ymvi,zmvi]t和[vxmi,vymi,vzmi]t;在机动目标坐标系下机动目标的位置以及速度分别定义为[xtv,ytv,ztv]t和[vxt,vyt,vzt]t;在目标机动坐标系下,机动目标仅在xvyv运动,在t时刻有下面方程(10)被得到:
31、
32、因此拦截器沿着直线拦截目标的剩余拦截时间可以被下列方程得到:
33、
34、其中
35、
36、tgoi也可以由求解下面方程(12)的根得到:
37、
38、其中
39、
40、进一步地,在步骤二中,为了保证所有导弹能够拦截目标,定义多导弹协同零控脱靶量,协同零控脱靶量的定义如下:从当前时刻开始,导弹的制导指令为零,目标按照当前机动状态继续飞行,最终获得弹目之间的最小距离;
41、定义多导弹协同零控脱靶量为
42、
43、定义多导弹协同博弈性能成本函数
44、
45、其中,q>0是权重系数,um=[aym1 azm1 ... aymi azmi]t是多个拦截器各自的视线倾角制导指令和视线偏角制导指令,vt=[v1 v2]t是机动目标在惯性坐标系下y方向和z方向的加速度,γ是目标的机动比例系数,根据实际需求来假设;ammax是拦截器最大机动加速度,atmax是机动目标的最大机动加速度。
46、进一步地,在步骤三中,初始化一群随机状态粒子,将每个粒子视为优化问题的一个可行解,每个粒子的优劣由事先设定好的适应度函数来确定,每个粒子可以在可行解空间范围内移动,通过更新速度变量实现方向移动;粒子将向当前最优粒子位置靠近,并逐代搜索更优解,在每一代中,粒子将追踪当前最优个体以及历史最优个体,直到迭代结束时当前的最优个体则为最优解;在迭代过程中,使用两个拟合函数来评估每个粒子;适应度函数输出每个粒子迄今为止达到的局部最佳适应度值,称为pij;输出粒子群中任何一个粒子迄今为止达到的全局最佳适应度值,称为pgj;pso算法由n个粒子组成,在搜索过程中,第i个粒子在第j维空间中的位置定义为:
47、xij={xi1,xi2,...,xij} (15)
48、每个粒子的当前速度为:
49、v={vi1,vi2,...,vij} (16)
50、粒子自身历史最优位置为:
51、pij={pi1,pi2,...,pij} (17)
52、整个粒子群的最优位置为:
53、pgj={pg1,pg2,...,pgj} (18)
54、粒子速度状态更新公式如下:
55、
56、其中tk为当前迭代次数,c1和c2为学习因子,n1和n2为[0,1]之间的随机数;上述方程(19)分为三个部分,第一个部分是粒子上一次移动的速度,第二部分是当前位置与之前自身最优位置之间的距离,第三部分是与整体粒子群最优位置之间的距离。
57、进一步地,在步骤三中,为了加强pso算法的求解能力,引入惯性到其速度更新公式中;当有大惯性时,粒子能够在解空间进行快速搜索,当具有小的惯性权重时,粒子能够在某一局部范围进行仔细搜索;因此可以通过惯性权重来控制粒子的整个运动过程;引入惯性后的速度更新公式如下:
58、
59、惯性因子参考粒子群中的平均适应度水平fave和最优适应度fmin,具体更新公式如下:
60、
61、为了增加pso算法的全局寻优能力,引入哈里斯鹰hho的寻优机制;hho算法可以从搜索转向开发,然后根据猎物的逃逸能量在不同的开发行为之间进行转换;猎物的能量在逃跑过程中会大大减少,为了模拟这一情况,猎物的逃逸能量模型为
62、
63、其中,e0为猎物的初始能量,每次迭代时会自动更新,tk为迭代次数,tk为最大迭代次数,当e≥0.5时进入搜索阶段,e<0.5时进入开发阶段;当在开发阶段,粒子采用硬包围策略向最优粒子靠近,速度和位置更新方程如下:
64、
65、本发明提出一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法的步骤。
66、本发明提出一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现所述基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法的步骤。
67、本发明的有益效果:
68、采用本发明设计的基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法,弥补了强机动目标难以拦截的问题;为考虑实际意义,所设计基于哈里斯鹰粒子群的三维多导弹协同博弈制导律方法是基于三维非线性系统;基于三维非线性相对运动学模型,提出了新的精确零控脱靶量,并提出了一种新颖的协同博弈制导策略;本发明提出的一种哈里斯鹰粒子群优化算法来对制导指令在线数值计算。相比于传统方法,本发明结合了实际情况对三维非线性相对运动学模型设计与分析多弹协同博弈性能目标函数,给出基于哈里斯鹰粒子群求解优化过程与方法,通过仿真得到了较好的结果。
- 还没有人留言评论。精彩留言会获得点赞!