相机标定方法、控制器及车辆与流程
本发明属于车辆,尤其涉及一种相机标定方法、控制器及车辆。
背景技术:
1、随着高级驾驶辅助功能的快速发展,车辆的相机在视觉感知中的准确性和精确性也越来越重要。
2、通常境况下,车辆在出厂前,会在专用标定车间对相机进行标定。但是在一些特殊情况下,外力作用导致相机位姿与出厂时相比出现较大的变化,例如长时间颠簸、发生追尾等。这时,就需要再次对相机进行标定。
技术实现思路
1、有鉴于此,本发明实施例提供了一种相机标定方法、控制器及车辆,以在相机位姿与出厂时相比出现变化时对相机进行准确标定。
2、第一方面,本发明实施例提供了一种相机标定方法,包括:
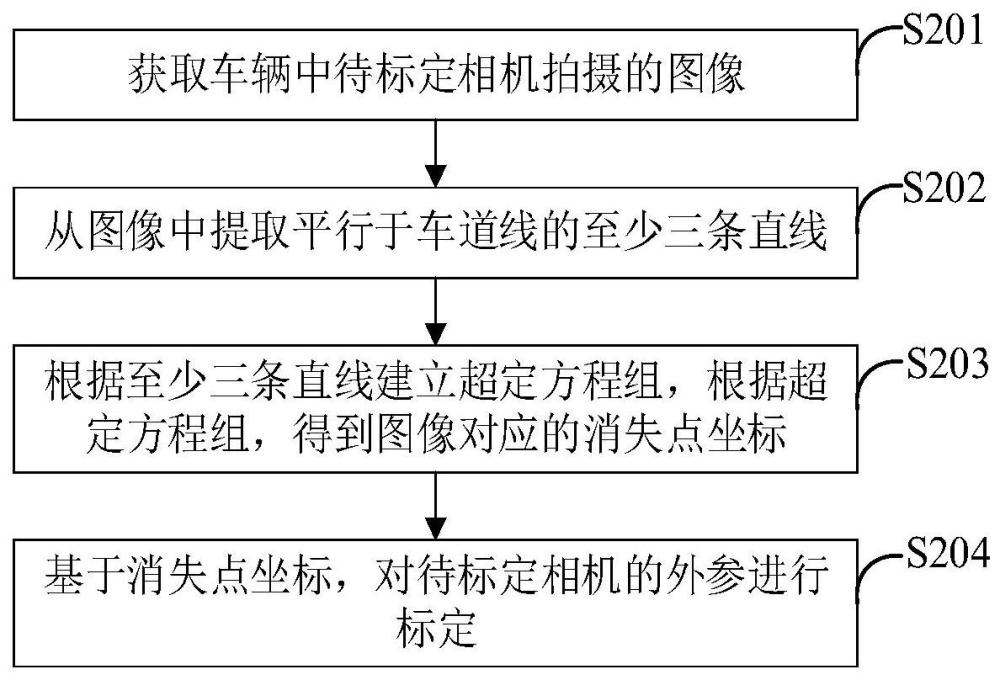
3、获取车辆中待标定相机拍摄的图像;
4、从图像中提取平行于车道线的至少三条直线;
5、根据至少三条直线建立超定方程组,根据超定方程组,得到图像对应的消失点坐标;
6、基于消失点坐标,对待标定相机的外参进行标定。
7、结合第一方面,在第一方面的一种可能的实现方式中,从图像中提取平行于车道线的至少三条直线,包括:
8、从图像的预设区域内提取至少三条待选直线;
9、根据预设斜率范围,从至少三条待选直线中筛选出至少三条斜率在预设斜率范围内的待选直线,得到平行于车道线的至少三条直线;其中,预设斜率范围根据车道线的斜率确定。
10、结合第一方面,在第一方面的一种可能的实现方式中,在从图像中提取平行于车道线的至少三条直线之后,还包括:
11、判断至少三条直线是否位于待标定相机的光轴的同一水平侧;
12、若是,则将图像标记为异常图像,异常图像不用于对待标定相机的外参进行标定。
13、结合第一方面,在第一方面的一种可能的实现方式中,在得到图像对应的消失点坐标之后,还包括:
14、计算消失点坐标与待标定相机的光轴的水平距离;
15、若水平距离大于预设的距离阈值,则将图像标记为异常图像,异常图像不用于对待标定相机的外参进行标定。
16、结合第一方面,在第一方面的一种可能的实现方式中,基于消失点坐标,对待标定相机的外参进行标定,包括:
17、基于消失点坐标,以及待标定相机的内参和外参旋转矩阵,计算待标定相机的俯仰角和偏航角,得到待标定相机的外参。
18、结合第一方面,在第一方面的一种可能的实现方式中,图像为多个;基于消失点坐标,对待标定相机的外参进行标定,包括:
19、依次基于每个图像对应的消失点坐标,对待标定相机的外参进行标定,直至满足预设的标定终止条件中的任意一项;
20、标定终止条件包括:
21、标定次数达到预设的次数阈值;
22、当次标定的外参与上次标定的外参的差值小于预设的差值阈值。
23、结合第一方面,在第一方面的一种可能的实现方式中,待标定相机为车辆中的前视相机或后视相机;
24、获取车辆中待标定相机拍摄的图像,包括:
25、在车辆沿车道线的方向行驶过程中,获取前视相机或后视相机拍摄的多个图像。
26、结合第一方面,在第一方面的一种可能的实现方式中,在基于消失点坐标,对待标定相机的外参进行标定之后,还包括:
27、根据标定后的外参,将图像投影到车辆的鸟瞰图上;
28、计算鸟瞰图上车道线的方向与车辆的行驶方向的偏差,若偏差大于预设的偏差阈值,则将待标定相机的外参调整为标定前的外参。
29、第二方面,本发明实施例提供了一种相机标定装置,包括:
30、获取模块,用于获取车辆中待标定相机拍摄的图像;
31、图像处理模块,用于从图像中提取平行于车道线的至少三条直线;
32、计算模块,用于根据至少三条直线建立超定方程组,并确定超定方程组的最小二乘解,得到图像对应的消失点坐标;
33、标定模块,用于基于消失点坐标,对待标定相机的外参进行标定。
34、第三方面,本发明实施例提供了一种控制器,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上述第一方面或第一方面的任意一种实现方式中的方法的步骤。
35、第四方面,本发明实施例提供了一种车辆,包括如第三方面的控制器。
36、第五方面,本发明实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现如上述第一方面或第一方面的任意一种实现方式中的方法的步骤。
37、本发明实施例与现有技术相比存在的有益效果是:
38、本发明实施例从图像中提取平行于车道线的至少三条直线,通过至少三条直线建立超定方程组并求解,得到图像对应的消失点坐标,由多条直线计算得到的消失点坐标精度较高且鲁棒性强;进一步,由于计算得到了精度较高的消失点坐标,通过该单个消失点的坐标,就可以对待标定相机的外参进行准确标定,对标定环境的要求降低,算法的泛化能力强。
技术特征:
1.一种相机标定方法,其特征在于,包括:
2.如权利要求1所述的相机标定方法,其特征在于,所述从所述图像中提取平行于车道线的至少三条直线,包括:
3.如权利要求1所述的相机标定方法,其特征在于,在所述从所述图像中提取平行于车道线的至少三条直线之后,还包括:
4.如权利要求1所述的相机标定方法,其特征在于,在所述得到所述图像对应的消失点坐标之后,还包括:
5.如权利要求1所述的相机标定方法,其特征在于,所述基于所述消失点坐标,对所述待标定相机的外参进行标定,包括:
6.如权利要求1至5任一项所述的相机标定方法,其特征在于,所述图像为多个;
7.如权利要求1至5任一项所述的相机标定方法,其特征在于,所述待标定相机为所述车辆中的前视相机或后视相机;
8.如权利要求7所述的相机标定方法,其特征在于,在所述基于所述消失点坐标,对所述待标定相机的外参进行标定之后,还包括:
9.一种控制器,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至8任一项所述方法的步骤。
10.一种车辆,其特征在于,包括如权利要求9所述的控制器。
技术总结
本发明适用于车辆技术领域,提供了一种相机标定方法、控制器及车辆,该方法包括:获取车辆中待标定相机拍摄的图像;从图像中提取平行于车道线的至少三条直线;根据至少三条直线建立超定方程组,根据超定方程组,得到图像对应的消失点坐标;基于消失点坐标,对待标定相机的外参进行标定。本发明能够在相机位姿与出厂时相比出现变化时对相机进行准确标定。
技术研发人员:谭竞扬,王光甫,贾澜鹏,邢晨,叶年进,曾鑫
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!