一种基于手势识别的井下约车方法及系统与流程
本发明涉及图像处理,特别涉及一种基于手势识别的井下约车方法及系统。
背景技术:
1、在矿井的一些区域,会设置固定位置的传统呼叫按钮,矿工可以通过按下按钮来呼叫井下车辆,然后车辆根据呼叫的位置前来接送乘客。
2、现有的叫车技术主要依赖物理按钮呼叫,缺乏智能化和自动化,操作相对繁琐,叫车的时间成本较高。矿工可能需要在工作中间停下来,走到指定位置或使用设备来呼叫车辆,影响了工作效率。
技术实现思路
1、本发明提供一种基于手势识别的井下约车方法及系统,能够提高约车的效率。
2、鉴于此,本发明一方面提供一种基于手势识别的井下约车方法,所述方法包括:
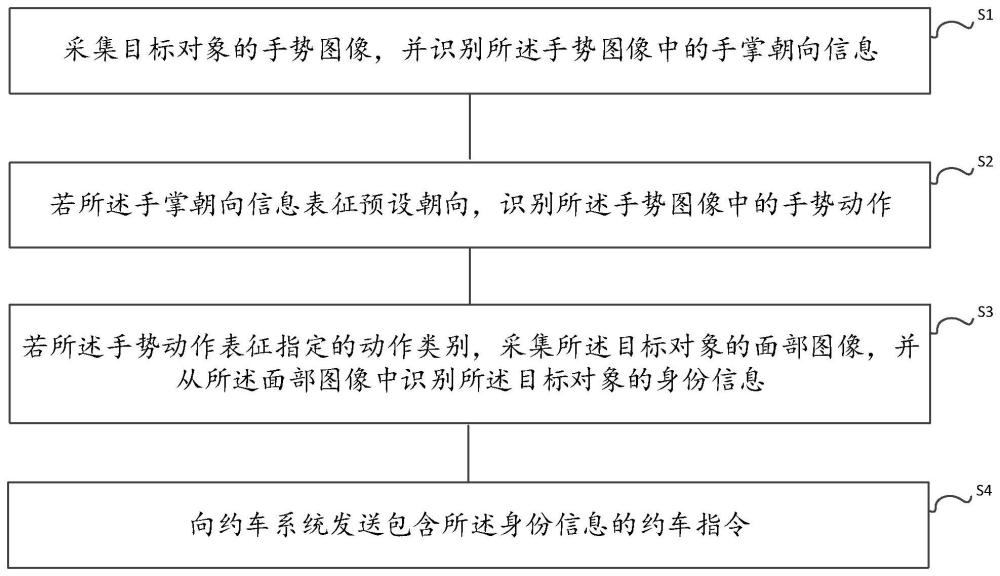
3、采集目标对象的手势图像,并识别所述手势图像中的手掌朝向信息;
4、若所述手掌朝向信息表征预设朝向,识别所述手势图像中的手势动作;
5、若所述手势动作表征指定的动作类别,采集所述目标对象的面部图像,并从所述面部图像中识别所述目标对象的身份信息;
6、向约车系统发送包含所述身份信息的约车指令。
7、在一个实施方式中,识别所述手势图像中的手掌朝向信息包括:
8、提取所述手势图像的手势特征,并通过第一分类支路对所述手势特征进行处理,以生成所述手势图像的手掌朝向信息。
9、在一个实施方式中,通过第一分类支路对所述手势特征进行处理,以生成所述手势图像的手掌朝向信息包括:
10、对所述手势特征进行特征维度不变的卷积处理,并将卷积处理后的手势特征在各自的通道中展平,以生成通道展平特征;
11、将所述通道展平特征进行特征压缩,得到长度为扩充后的通道数的一维特征;
12、基于所述一维特征,生成所述手势图像的手掌朝向信息。
13、在一个实施方式中,基于所述一维特征,生成所述手势图像的手掌朝向信息包括:
14、计算所述一维特征在手掌朝向分类任务中的概率分布向量;
15、确定所述概率分布向量表征的手掌朝向的分类结果,并基于所述分类结果生成所述手势图像的手掌朝向信息。
16、在一个实施方式中,在确认所述手势动作表征指定的动作类别之后,所述方法还包括:
17、对手势特征进行特征维度不变的卷积处理,并将卷积处理后的手势特征在各自的通道中展平,以生成通道展平特征;
18、将所述通道展平特征进行特征压缩,得到长度为扩充后的通道数的一维特征;
19、基于所述一维特征,生成表征左右手类别的分类信息;
20、若所述分类信息表征所述手势图像中包含的手掌为右手,向约车系统发送包含所述身份信息的约车指令。
21、本发明还提供一种基于手势识别的井下约车系统,所述系统包括:
22、手掌朝向识别单元,用于采集目标对象的手势图像,并识别所述手势图像中的手掌朝向信息;
23、动作识别单元,用于若所述手掌朝向信息表征预设朝向,识别所述手势图像中的手势动作;
24、身份确认单元,用于若所述手势动作表征指定的动作类别,采集所述目标对象的面部图像,并从所述面部图像中识别所述目标对象的身份信息;
25、指令发送单元,用于向约车系统发送包含所述身份信息的约车指令。
26、在一个实施方式中,所述手掌朝向识别单元,具体用于提取所述手势图像的手势特征,并通过第一分类支路对所述手势特征进行处理,以生成所述手势图像的手掌朝向信息。
27、在一个实施方式中,所述手掌朝向识别单元,具体用于对所述手势特征进行特征维度不变的卷积处理,并将卷积处理后的手势特征在各自的通道中展平,以生成通道展平特征;将所述通道展平特征进行特征压缩,得到长度为扩充后的通道数的一维特征;基于所述一维特征,生成所述手势图像的手掌朝向信息。
28、在一个实施方式中,所述手掌朝向识别单元,具体用于,计算所述一维特征在手掌朝向分类任务中的概率分布向量;确定所述概率分布向量表征的手掌朝向的分类结果,并基于所述分类结果生成所述手势图像的手掌朝向信息。
29、在一个实施方式中,所述系统还包括左右手识别单元,所述左右手识别单元具体用于,对手势特征进行特征维度不变的卷积处理,并将卷积处理后的手势特征在各自的通道中展平,以生成通道展平特征;将所述通道展平特征进行特征压缩,得到长度为扩充后的通道数的一维特征;基于所述一维特征,生成表征左右手类别的分类信息;
30、相应地,所述指令发送单元具体用于,若所述分类信息表征所述手势图像中包含的手掌为右手,向约车系统发送包含所述身份信息的约车指令。
31、本发明提供的技术方案,通过手势识别来完成自动约车的过程,该过程不需要矿工进行人工干预,减少了人为错误的可能性,提高了约车的准确性和可靠性。井下手势识别约车技术实现了实时的手势识别和响应,相比传统的约车方式,大大缩短了车辆接送乘客的时间,这对于提高煤矿生产效率和矿工的工作效率至关重要。
32、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
33、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种基于手势识别的井下约车方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,识别所述手势图像中的手掌朝向信息包括:
3.根据权利要求2所述的方法,其特征在于,通过第一分类支路对所述手势特征进行处理,以生成所述手势图像的手掌朝向信息包括:
4.根据权利要求3所述的方法,其特征在于,基于所述一维特征,生成所述手势图像的手掌朝向信息包括:
5.根据权利要求1所述的方法,其特征在于,在确认所述手势动作表征指定的动作类别之后,所述方法还包括:
6.一种基于手势识别的井下约车系统,其特征在于,所述系统包括:
7.根据权利要求6所述的系统,其特征在于,所述手掌朝向识别单元,具体用于提取所述手势图像的手势特征,并通过第一分类支路对所述手势特征进行处理,以生成所述手势图像的手掌朝向信息。
8.根据权利要求7所述的系统,其特征在于,所述手掌朝向识别单元,具体用于对所述手势特征进行特征维度不变的卷积处理,并将卷积处理后的手势特征在各自的通道中展平,以生成通道展平特征;将所述通道展平特征进行特征压缩,得到长度为扩充后的通道数的一维特征;基于所述一维特征,生成所述手势图像的手掌朝向信息。
9.根据权利要求8所述的系统,其特征在于,所述手掌朝向识别单元,具体用于,计算所述一维特征在手掌朝向分类任务中的概率分布向量;确定所述概率分布向量表征的手掌朝向的分类结果,并基于所述分类结果生成所述手势图像的手掌朝向信息。
10.根据权利要求6所述的系统,其特征在于,所述手掌朝向识别单元在采集目标对象的手势图像之后,还用于执行以下步骤:
技术总结
本发明提供了一种基于手势识别的井下约车方法及系统,其中,所述方法包括:采集目标对象的手势图像,并识别所述手势图像中的手掌朝向信息;若所述手掌朝向信息表征预设朝向,识别所述手势图像中的手势动作;若所述手势动作表征指定的动作类别,采集所述目标对象的面部图像,并从所述面部图像中识别所述目标对象的身份信息;向约车系统发送包含所述身份信息的约车指令。本发明提供的技术方案,能够提高井下约车的效率。
技术研发人员:余丹,兰雨晴,曾大龙,李森,贺江
受保护的技术使用者:慧之安信息技术股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!