一种车辆内置360度全景影像合成处理方法与流程
本发明属于影像合成处理,涉及一种车辆内置360度全景影像合成处理方法。
背景技术:
1、通过车辆内置360度全景影像,驾驶员可以获得全方位的视野从而降低事故的发生概率。特别是在倒车、并线或行驶复杂道路时,全景影像可以提供额外的视觉支持,帮助驾驶员做出更准确的决策,由此凸显了全景影响合成处理的重要性。
2、目前车辆内置360度全景影像合成处理主要侧重在合成图像质量层面的处理,如图像拼接缝处的处理以及图像视角层面,但是当前全息影像合成处理还存在以下几个方面的不足:1、合成处理场景的适应性较为局限,当前合成处理技术多偏向较为简单的场景,如倒车等,对于动态复杂类的场景考虑较少,适应性不足,使得合成图像质量难以达到预期,进而无法保障驾驶人员的观看体验。
3、2、合成影像的图像处理存在一定的欠缺,未结合现实环境的动态变化进行采集参数的自动调整,进而使得车辆全景影像合成效率提升不明显,也无法减少后续影像合成的处理流程。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,现提出一种车辆内置360度全景影像合成处理方法。
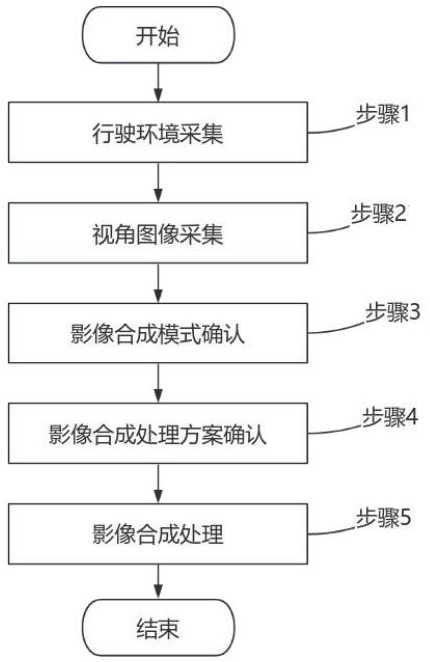
2、本发明的目的可以通过以下技术方案实现:本发明提供一种车辆内置360度全景影像合成处理方法,该方法包括:步骤1、行驶环境采集:启动车辆各视角区域内安置的环境采集终端采集各视角区域的环境信息,同时从车辆管理后台提取车辆的行驶车速信息。
3、步骤2、视角图像采集:启动车辆各视角区域内安置的摄像头进行图像采集,得到各视角区域对应各采集图像。
4、步骤3、影像合成模式确认:根据各视角区域对应各采集图像,确认车辆全景影像合成模式,所述车辆全景影像合成模式为ⅰ级模型和ⅱ级模式中的一个。
5、步骤4、影像合成处理方案确认:当车辆全景影像合成模型为ⅱ级模式,确认全景影像参数处理方案。
6、步骤5、影像合成处理:用于根据全景影像参数处理方案,对各视角区域内安置的摄像头进行对应采集参数处理。
7、于本发明一优选实施例,所述确认车辆全景影像合成模式,包括:对各视角区域对应各采集图像中进行对象状态识别,若某视角区域对应各采集图像的对象状态中存在动态状态,则将ⅱ级模式作为车辆全景影像合成模式,若各视角区域对应各采集图像的对象状态均为静态状态,从所述环境信息中提取各采集时间点的光线亮度,确认车辆全景影像合成的光影干扰度。
8、从所述行驶车速信息中定位出各采集时间点的车速,据此确认车辆全息影像合成的车速干扰度。
9、若或者,将ⅱ级模式作为车辆全景影像合成模式,若且,将ⅰ级模式作为车辆全景影像合成模式,其中,为设定参照全景影像合成的光影干扰度,为设定参照全景影像合成的车速干扰度。
10、于本发明一优选实施例,所述确认车辆全景影像合成的光影干扰度,包括:从各视角区域在各采集时间点的光线亮度中提取当前所处采集时间点的光线亮度,并筛选出最高光线亮度和最低光线亮度,作差得到最大光线亮度差,并将其作为评估值。
11、将设定的影像合成干扰光线亮度差作为对照值,若评估值大于或者等于对照值,将车辆全景影像合成的光影干扰度记为。
12、若评估值小于对照值,以时间为横坐标,以光线亮度为纵坐标,构建各视角区域的光线亮度变化曲线,并分别从中进行幅值和波动点数目提取,分别记为和,表示方位编号,。
13、将作为光影干扰评估变量,为设定参照的光线亮度幅值、波动点数目,进而将作为车辆全景影像合成的光影干扰度,并记为,为设定参照变量,以此得到车辆全景影像合成的光影干扰度,取值为或者,。
14、于本发明一优选实施例,所述确认车辆全息影像合成的车速干扰度,包括:基于各采集时间点的车速,确认车辆常态车速。
15、以两个采集时间点为一个车速采集时间组,以此将各采集时间点划分按照时间先后划分为各车速采集时间组,并将各车速采集时间组按照时间先后进行排序,得到各车速采集时间组的位置排序。
16、将各车速采集时间组内两采集时间点的车速进行作差,作为各车速采集时间组的采集车速差,进而通过车速偏差评定规则评定得到车速偏差时间组数和波动偏差时间组数。
17、统计车辆全息影像合成的车速干扰度,,为车速采集时间组数,为设定干扰车速,为向上取值符号。
18、于本发明一优选实施例,所述车速偏差评定规则的具体评定过程为:将采集车速差大于设定的车辆稳定行驶评估车速差作为车速偏差评定条件1。
19、将车速偏差评定条件1成立的车速采集时间组作为车速偏差时间组,以此输出车速偏差时间组数。
20、提取各车速偏差时间组的位置排序,进而得到各车速偏差时间组的间隔车速采集时间组数,并将间隔车速采集时间组数不为0作为车速偏差评定条件2。
21、若某俩车速偏差时间组的车速偏差评定条件2成立,则将该两车速偏差时间组组成波动偏差时间组,据此输出波动偏差时间组数。
22、于本发明一优选实施例,所述确认全景影像参数处理方案,包括:评定全景影像合成参数的处理导因项。
23、当处理导因项为车速时,从车辆管理后台提取导因标签为车速的各摄像采集参数,记为各车速采集参数,并提取各车速采集参数的设置值,表示车速采集参数编号,。
24、将作为各车速采集参数的当前更正设置值,其中,为单位车速干扰度偏差对应第个车速关联采集参数的浮动设置值,为设定的各车速采集参数的补偿更正值,并确认各车速采集参数的自动更正设置频率,将各车速采集参数的当前更正设置值和自动更正设置频率作为全景影像参数处理方案。
25、当处理导因项为光影时,将各视角区域内安置的摄像头作为各方位摄像头。
26、从车辆管理后台提取导因标签为光影的各摄像采集参数,作为各光影采集参数,并提取各光影采集参数的设置值,记为,表示各光影采集参数编号,,分析各方位摄像头对应各光影采集参数的当前更正设置值。
27、提取各方位摄像头所属视角区域的光线亮度变化曲线的幅值和波动点数目,分别记为和,表示方位摄像头编号,。
28、设置各光影采集参数的自动更正设置频率为同一频率,进而将作为各方位摄像头对应各光影采集参数的自动更正设置频率,为单位光影波动指数比对应参照自动更正设置频率,为设定参照光影波动指数。
29、将各方位摄像头对应各光影采集参数的当前更正设置值和自动更正设置频率作为全景影像参数处理方案。
30、当处理导因项为车速和光影时,将各车速采集参数的当前更正设置值、自动更正设置频率以及各方位摄像头对应各光影采集参数的当前更正设置值和自动更正设置频率作为全景影像参数处理方案。
31、于本发明一优选实施例,所述评定全景影像合成参数的处理导因项,包括:当仅存在成立,将车速作为处理导因项。
32、当仅存在成立,将光影采集作为处理导因项。
33、当且成立,将光影和车速均作为处理导因项。
34、于本发明一优选实施例,所述各车速采集参数的补偿更正值的具体设定方式如下:构建图像采集模拟模型,图像采集模拟模型的输入为各车速采集参数的设置模拟值,输出为模拟图像所属各图像指标的数值。
35、设置各车速采集参数对应的各模拟值,并将各车速采集参数对应各模拟值进行随机组合,得到各模拟组,并记录各模拟组中各车速采集参数的所属模拟值。
36、将各模拟组导入图像采集模拟模型,进而输出各模拟组对应模拟图像所属各图像指标的数值,据此统计各模拟组对应模拟图像的成像符合度,并筛选出成像符合度最大的模拟组,作为目标模拟组。
37、提取目标模拟组中各车速采集参数的所属模拟值,记为,进而将作为各车速采集参数的补偿更正值。
38、于本发明一优选实施例,所述各车速采集参数的自动更正设置频率均相同,所述自动更正设置频率为,为设定的单位车速波动因子对应参照更正频率。
39、于本发明一优选实施例,所述分析各方位摄像头对应各光影采集参数的当前更正设置值,包括:将各方位摄像头所属视角区域在当前所处时间点各光线亮度作为各方位摄像头的外部亮度。
40、将各方位摄像头的外部亮度与设定的各外部亮度对应各光影采集参数的适宜设置值进行对比,得到各方位摄像头所属外部亮度对应各光影采集参数的适宜设置值,记为,为方位摄像头编号,。
41、将作为各方位摄像头对应各光影采集参数的当前更正设置值。
42、相较于现有技术,本发明的有益效果如下:(1)本发明通过结合车辆的环境和车辆的行驶车速进行影像合成模式确认以及影像合成处理方案确认,进而进行全景影像合成,有效解决了当前合成处理场景适应性较为局限的问题,扩展了全景影像合成的处理场景,同时也提升了后续合成处理的便利性,从而进一步提升了合成图像的质量保障,并且还确保了驾驶人员的观看体验。
43、(2)本发明通过进行光线环境和车速进行车辆全景影像合成的光影干扰度和车辆全息影像合成的车速干扰度分析,直观的展示了车辆当前的光线情况以及车速情况,进而促进了后续摄像处理的及时性,并且也避免了从图像层面进行合成处理的繁琐性,进而提升了后续图像合成拼接的顺畅性和可靠性。
44、(3)本发明通过评定全景影像合成参数的处理导因项,并对导因项为车速、光影情况下分别进行全景影像参数处理方案确认,有效弥补了当前合成影像对应图像处理存在的欠缺,充分融合了现实环境的动态变化进行不同类采集参数的自动调整,进而显著提升了车辆全景影像合成效率,同时还简化了后续全景影像合成的处理流程。
- 还没有人留言评论。精彩留言会获得点赞!