轮廓边缘提取方法和装置与流程
本申请属于图像处理,尤其涉及一种轮廓边缘提取方法和装置。
背景技术:
1、在工业视觉外观检测中,首先需要对待检测区域进行定位,提取感兴趣区域,再对区域内图像进行缺陷检测。相关技术中,区域定位方法常采用二值分割和形态学提取的方式,该方法对成像一致性要求较高,而在实际应用中,受机构轨迹、光学、产品差异以及外界环境等干扰,容易导致成像一致性较差,从而影响该方法所最终确定的定位准确度和定位精度。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出一种轮廓边缘提取方法和装置,操作简单便捷,轮廓提取精度高,效果好且具有较高的普适性,适用于多种生产应用场景。
2、第一方面,本申请提供了一种轮廓边缘提取方法,该方法包括:
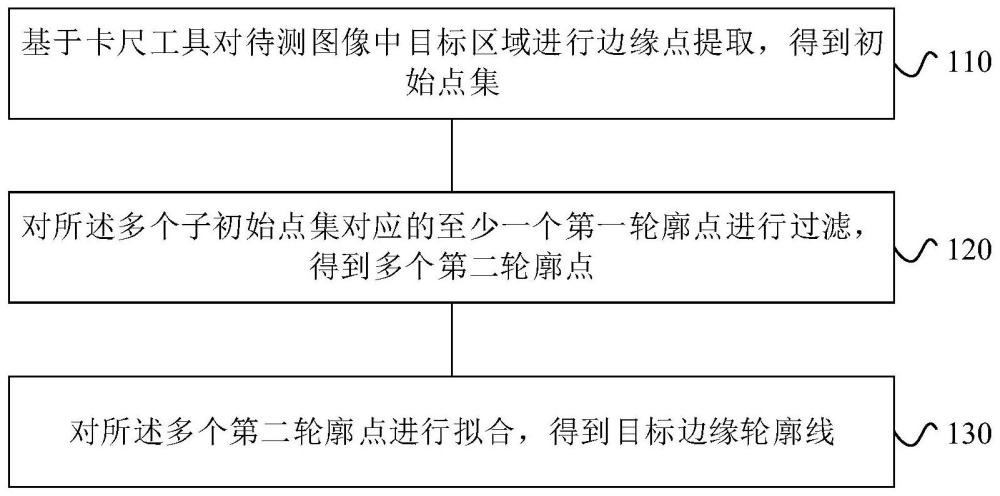
3、基于卡尺工具对待测图像中目标区域进行边缘点提取,得到初始点集,所述初始点集包括多个子初始点集,各所述子初始点集包括至少一个第一轮廓点;所述卡尺工具包括多个单次取点区域,所述多个单次取点区域与所述多个子初始点集一一对应;
4、对所述多个子初始点集对应的至少一个第一轮廓点进行过滤,得到多个第二轮廓点;
5、对所述多个第二轮廓点进行拟合,得到目标边缘轮廓线。
6、根据本申请的轮廓边缘提取方法,通过对待测区域处理生成卡尺工具,利用卡尺工具提取第一轮廓点,对第一轮廓点进行过滤去除异常突变点,然后对过滤后的第二轮廓点进行拟合,得到目标边缘轮廓线,操作简单便捷,轮廓提取精度高,效果好且具有较高的普适性,适用于多种生产应用场景。
7、根据本申请的一个实施例,所述基于卡尺工具对待测图像中目标区域进行边缘点提取,得到初始点集,包括:
8、计算得到所述多个单次取点区域中目标单次取点区域内像素点沿所述卡尺工具的检测方向的灰度投影波形;
9、对所述灰度投影波形求导,得到一阶导波形;
10、基于所述一阶导波形,提取得到所述目标单次取点区域对应的至少一个第一轮廓点。
11、根据本申请的一个实施例,所述基于所述一阶导波形,提取得到所述目标单次取点区域对应的至少一个第一轮廓点,包括:
12、基于所述一阶导波形内各像素点对应的灰度变化量,从所述目标单次取点区域内提取得到第一候选点、第二候选点和第三候选点;所述第一候选点为以所述检测方向为基准所获取的所述灰度变化量超过第一目标范围的第一个像素点,所述第二候选点为以所述检测方向为基准所获取的所述灰度变化量超过所述第一目标范围的最后一个像素点,所述第三候选点为所述灰度变化量最大的像素点;
13、将所述第一候选点、所述第二候选点和所述第三候选点中的至少一个,确定为所述至少一个第一轮廓点。
14、根据本申请的一个实施例,所述对所述多个子初始点集对应的至少一个第一轮廓点进行过滤,得到多个第二轮廓点,包括:
15、对所述多个子初始点集对应的至少一个第一轮廓点进行中值滤波,得到所述多个第二轮廓点。
16、根据本申请的一个实施例,所述对所述多个子初始点集对应的至少一个第一轮廓点进行中值滤波,得到所述多个第二轮廓点,包括:
17、基于所述多个子初始点集对应的至少一个第一轮廓点的排列顺序,从所述多个子初始点集对应的至少一个第一轮廓点中顺次提取第一数量的第一轮廓点,得到多个第二点集,各所述第二点集包括所述第一数量的第一轮廓点;
18、基于目标排序对所述多个第二点集中目标第二点集所包括的所述第一数量的第一轮廓点进行排序,得到第一序列;所述目标顺序包括灰度变化量递增顺序或灰度变化量递减顺序;
19、将所述第一序列中的中心像素点确定为所述目标第二点集对应的第二轮廓点。
20、根据本申请的一个实施例,所述对所述多个第二轮廓点进行拟合,得到目标边缘轮廓线,包括:
21、采用多项式曲线拟合算法对所述多个第二轮廓点进行拟合,得到所述目标边缘轮廓线。
22、第二方面,本申请提供了一种轮廓边缘提取装置,该装置包括:
23、第一处理模块,用于基于卡尺工具对待测图像中目标区域进行边缘点提取,得到初始点集,所述初始点集包括多个子初始点集,各所述子初始点集包括至少一个第一轮廓点;所述卡尺工具包括多个单次取点区域,所述多个单次取点区域与所述多个子初始点集一一对应;
24、第二处理模块,用于对所述多个子初始点集对应的至少一个第一轮廓点进行过滤,得到多个第二轮廓点;
25、第三处理模块,用于对所述多个第二轮廓点进行拟合,得到目标边缘轮廓线。
26、根据本申请的轮廓边缘提取装置,通过对待测区域处理生成卡尺工具,利用卡尺工具提取第一轮廓点,对第一轮廓点进行过滤去除异常突变点,然后对过滤后的第二轮廓点进行拟合,得到目标边缘轮廓线,操作简单便捷,轮廓提取精度高,效果好且具有较高的普适性,适用于多种生产应用场景。
27、第三方面,本申请提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的轮廓边缘提取方法。
28、第四方面,本申请提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的轮廓边缘提取方法。
29、第五方面,本申请提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的轮廓边缘提取方法。
30、本申请实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
31、通过对待测区域处理生成卡尺工具,利用卡尺工具提取第一轮廓点,对第一轮廓点进行过滤去除异常突变点,然后对过滤后的第二轮廓点进行拟合,得到目标边缘轮廓线,操作简单便捷,轮廓提取精度高,效果好且具有较高的普适性,适用于多种生产应用场景。
32、进一步地,通过采用中值滤波以进行非线性滤波,能够有效去除各种类型的噪声,且计算简单、速度快,适用于实时处理和嵌入式系统;除此之外,采用中值滤波,可以对图像进行多次处理,以进一步提高降噪效果,从而提高所获取的第二轮廓点的精确性和准确性。
33、更进一步地,通过采用多项式曲线拟合算法对多个第二轮廓点进行拟合,可以更好地理解数据的趋势和变化,从而更好地预测未来的发展趋势以得到更贴近真实情况的拟合结果,从而提高目标边缘轮廓线的拟合精度和真实性。
34、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种轮廓边缘提取方法,其特征在于,包括:
2.根据权利要求1所述的轮廓边缘提取方法,其特征在于,所述基于卡尺工具对待测图像中目标区域进行边缘点提取,得到初始点集,包括:
3.根据权利要求2所述的轮廓边缘提取方法,其特征在于,所述基于所述一阶导波形,提取得到所述目标单次取点区域对应的至少一个第一轮廓点,包括:
4.根据权利要求1-3任一项所述的轮廓边缘提取方法,其特征在于,所述对所述多个子初始点集对应的至少一个第一轮廓点进行过滤,得到多个第二轮廓点,包括:
5.根据权利要求4所述的轮廓边缘提取方法,其特征在于,所述对所述多个子初始点集对应的至少一个第一轮廓点进行中值滤波,得到所述多个第二轮廓点,包括:
6.根据权利要求1-3任一项所述的轮廓边缘提取方法,其特征在于,所述对所述多个第二轮廓点进行拟合,得到目标边缘轮廓线,包括:
7.一种轮廓边缘提取装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-6任一项所述轮廓边缘提取方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1-6任一项所述的轮廓边缘提取方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-6任一项所述轮廓边缘提取方法。
技术总结
本申请公开了一种轮廓边缘提取方法和装置,属于图像处理技术领域。所述轮廓边缘提取方法,包括:基于卡尺工具对待测图像中目标区域进行边缘点提取,得到初始点集,初始点集包括多个子初始点集,各子初始点集包括至少一个第一轮廓点;对多个子初始点集对应的至少一个第一轮廓点进行过滤,得到多个第二轮廓点;对多个第二轮廓点进行拟合,得到目标边缘轮廓线。本申请的轮廓边缘提取方法,通过对待测区域处理生成卡尺工具,利用卡尺工具提取第一轮廓点,对第一轮廓点进行过滤去除异常突变点,然后对过滤后的第二轮廓点进行拟合,得到目标边缘轮廓线,操作简单便捷,轮廓提取精度高,效果好且具有较高的普适性,适用于多种生产应用场景。
技术研发人员:曾毅
受保护的技术使用者:深圳市凌云视迅科技有限责任公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!