一种基于FI-VMD-CS的水下目标信号去噪方法
本发明属于极低频和甚低频水下目标信号探测,具体涉及一种基于fi-vmd-cs的水下目标信号去噪方法。
背景技术:
1、目前在对“隐身”型潜艇的探测中,传统的声纳、红外、地磁等探测技术已经不能满足需求;因此开展极低频和甚低频水下目标探测的研究至关重要。由于海浪中盐离子切割地磁场产生的海浪噪声、电网负载变换引起的工频背景中的固有噪声以及测量系统的影响,会使在水下目标探测中采集的信号带有大量混合种类的噪声。针对这类信号所含复杂强噪声,研究者们提出了多种处理方法,如:小波变换、经验模态分解(emd)、集成经验模态分解算法(eemd)、变分模态分解算法(vmd)。但上述方法均具有不同的缺陷:小波变换依赖于阈值的选取,阈值设置过低会出现人工噪声,过高则会损坏极低频或甚低频信号,并且小波基的选择也会影响去噪效果;emd算法在分解重构信号时,其模态分量之间通常存在模态混叠,从而影响信号的去噪效果;eemd算法中辅助高斯白噪声分解残留与vmd算法人工经验调参造成的分解效果偏差等问题都会影响信号的去噪效果。
技术实现思路
1、本发明要解决的技术问题是:提供一种基于fi-vmd-cs的水下目标信号去噪方法,用于剔除极低频和甚低频水下目标信号的噪声。
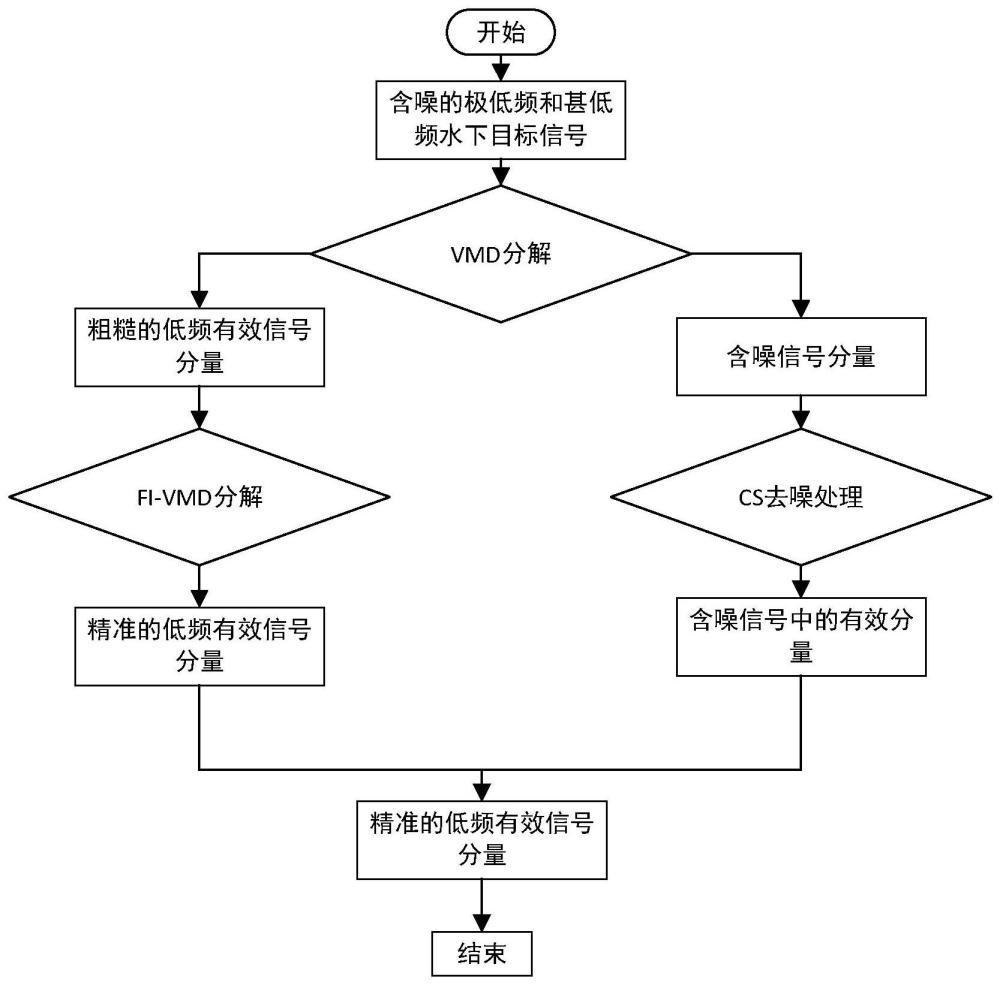
2、本发明为解决上述技术问题所采取的技术方案为:一种基于fi-vmd-cs的水下目标信号去噪方法,包括以下步骤:s1:采用变分模态分解vmd算法对水下目标信号进行初次分解,得到粗糙的低频有效分量和含噪分量;
3、s2:利用快速迭代变分模态分解fi-vmd算法对粗糙的低频有效分量进行二次分解,获得精准的低频有效分量;
4、s3:采用压缩感知cs算法对含噪分量进行去噪处理,获得含噪分量中的有效分量;
5、s4:将经过快速迭代变分模态分解算法二次分解得到的有效分量与经过压缩感知算法分解得到的有效分量进行重构,剔除噪声得到准确的水下目标信号。
6、按上述方案,所述的步骤s1中,设t为初始时间,采用vmd算法将原始的水下目标信号fsignal=f(t)进行vmd分解为k个模态分量μk={μ1,μ2,…μk},第k个imf分量的瞬时频率为ωk={ω1,ω2,…ωk};设α是二次惩罚因子,λ是拉格朗日因子;δ(t)是狄拉克函数,*是卷积符号,j是虚数单位,是希尔伯特变换;则约束变分问题为:
7、
8、
9、设λ(t)是拉格朗日乘子,有约束最优化问题与无约束最优化问题的变换结果为:
10、
11、用交替方向乘数法得到上式的鞍点,并在频域内迭代更新μk、ωk和λ。
12、进一步的,所述的步骤s1中,vmd分解的具体步骤为:
13、s11:初始化λ1和n为0;
14、s12:是原始信号f(t)对应的频域形式,是拉格朗日乘子λ(t)对应的频域形式;是谐波信号μi(t)的傅里叶变换;是各模态分量对应的维纳滤波,n为迭代次数;通过在频域上加入维纳滤波更新模态函数为:
15、
16、s13:设是对应的傅里叶变换,更新中心频率为:
17、
18、s14:设τ为噪声容限参数,更新拉格朗日乘子为:
19、
20、s15:设ε为判别精度,ε>0;重复步骤s12、s13和s14,直至满足迭代终止条件式:
21、
22、s16:输出k个模态分量。
23、进一步的,所述的步骤s1中,k由水下目标信号的频谱图波峰的个数确定。
24、按上述方案,所述的步骤s2中,具体步骤为:
25、s21:获取原始信号;
26、s22:进行fft并获得频谱;
27、s23:设置初始参数k=1和β,μ=(3500,500),用于计算带宽参数α,以最大fft值作为初始频率,次数是迭代次数,初始时间t等于0;
28、s24:分解并获得子信号及模态分量;
29、s25:提取模态分量的瞬时频率ωk;
30、s26:如果中心频率ωk在预定义频带[a,b]中,则分解结束;否则继续迭代以更新带宽参数α。
31、按上述方案,所述的步骤s3中,具体步骤为:
32、在压缩感知框架下构造稀疏表示字典矩阵和观测矩阵并进行信号重构,对含噪分量做二次分解获得含噪分量中的有效分量;设φ为观测矩阵,d为含噪的水下目标信号,x为不含噪声的纯信号,z为噪声,z′为误差项即压缩感知采样后的噪声,则压缩感知的观测信号y为:
33、y=φd=φ(x+z)=φx+z′ (8)。
34、进一步的,所述的步骤s3中,构造稀疏表示字典矩阵,通过特定变换得到变换域内相对稀疏的信号,选择稀疏基使信号的稀疏系数个数最少;选择频谱长度使低频段的有效分量不为零,使水下目标信号在频域上是稀疏的,并用离散傅里叶变换来表示;在此基础上对比离散余弦变换dct和小波变换wt的对水下目标磁异常信号去噪效果的实用性。
35、进一步的,所述的步骤s3中,选择稳定的观测矩阵使观测矩阵满足约束等距性质:对任意稀疏度为κ的信号θ和常数δκ∈(0,1),稀疏表示字典矩阵ψ∈rn×n满足
36、
37、
38、满足条件的观测矩阵包括高斯随机矩阵、伯努利随机矩阵、局部傅里叶矩阵、局部哈达玛测量矩阵等。
39、进一步的,所述的步骤s3中,采用正交追踪匹配算法进行信号重构,分离经稀疏表示后的有效分量和随机噪声;正交追踪匹配算法的具体步骤为:
40、s331:输入观测矩阵φ、采样信号y和稀疏度κ;
41、s332:初始化残差rtf=y,索引集t=0;
42、s333:找到残差和观测矩阵各列中内积最大值时的脚标
43、s334:更新索引集λt=λt-1∪λt,并记录寻找到的观测矩阵,重建原子集
44、s335:由最小二乘法解得
45、s336:更新残差
46、s337:判断是否满足t>κ,若满足则迭代终止;若不满足则重复步骤s333~s337。
47、一种计算机存储介质,其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行一种基于fi-vmd-cs的水下目标信号去噪方法。
48、本发明的有益效果为:
49、1.本发明的一种基于fi-vmd-cs的水下目标信号去噪方法是一种新型的、多用途的水下目标信号处理方法,针对极低频和甚低频水下目标信号有效信息在强背景噪声干扰下提取困难的问题,基于快速迭代双重变分模态分解与压缩感知重构算法(fi-vmd-cs),实现了剔除极低频和甚低频水下目标信号的噪声的功能,有效避免了低频信号的损失。
50、2.本发明采用fi-vmd算法进行首次分解有效分量,有效克服了emd算法中的模态混叠和端点效应问题,解决了难以确定vmd算法分解初始参数导致准确度低和分解效率低的问题,弥补了传统vmd算法依靠人工经验调参速度慢和算法泛化差等缺点。
51、3.本发明对首次分解得到的含噪分量采用压缩感知算法(cs)进行降噪处理,得到含噪分量中的有效信号,与经过fi-vmd处理后的有效分量重构,得到精准的去噪信号,最大限度地保留了原信号的波形特征。
- 还没有人留言评论。精彩留言会获得点赞!