在轨探测图像全链路仿真方法和系统与流程
本发明涉及星图模拟,具体地,涉及一种在轨探测图像全链路仿真方法和系统。
背景技术:
1、随着航天技术的快速发展,在轨探测任务需求与日俱增,对航天设备的功能性能要求越来越高。相机作为空间观测的主要传感器件,其探测能力和观测范围等指标会直接影响航天任务的执行结果,因此需要对相机进行高精度的标校。目前主要采用地面试验或在轨试验的方法对相机进行测量标校。但在航天设备设计研制过程中,预研天基设备的平台运行轨道、载荷配置、观测能力往往与已有在轨的天基设备存在一定差距,导致难以直接利用现有的探测图像对预研项目中的算法(例如目标检测、星图识别、视线确定等)的功能性能进行测试和验证。同时,由于开展航天空间试验耗费巨大,一般采用外场观星试验或者采用数字星图模拟来获取相机标定和相关算法验证所需的星图图像数据。相比于外场观星试验,星图模拟技术通过模拟传感器在轨真实状态,根据卫星平台辅助数据及星表数据,实时输出模拟的星图图像,满足目标检测、星图识别、姿态解算以及视线确定等算法的测试和验证等应用需求,且实现过程不受地域和气候的制约,因此近年来,对数字星图模拟技术的研究越来越多。
2、专利文献cn113970327b公开了一种电子星图模拟器、电子模拟星图生成方法和电子设备,解决了现有技术中生成电子模拟星图速度较慢,且无法实现嵌入式设备的问题,但是此专利没有考虑星点拖尾和相机畸变。专利文献cn115908554a公开了一种高精度亚像素模拟星图以及亚像素提取方法,采用二维高斯数学模型模拟了亚像素星点光斑成像,但是此专利同样没有考虑星点拖尾的现象。专利文献cn116558505a公开了一种星图模拟中观测星提取的方法]通过对天球分区相关节点进行判断的提取方法缩小提取观测星的范围,但是此专利没有考虑中心视轴指向南北天极的情况。专利文献cn104132661b公开了动态星图拖尾星像的数值模拟方法,采用龙哥库塔法解算曝光时间内的姿态四元数序列,将星光矢量序列映射到成像阵列面上,基于二维高斯点扩散函数对星像点进行弥散,但是此专利仅考虑了星像点拖尾显现象,未考虑畸变和背景噪声,与实际情况存在很大差距。现有文献[李光茜,王凌云,郑茹,等,高动态地面星图模拟检测系统算法研究,长春理工大学(自然科学版),2019,42(3)]通过对星图分区提高了星图模拟刷新时间,但是此文章在恒星选取时同样没有考虑中心视轴指向南北天极的情况。现有文献[张超,sins/cns仿真平台的星敏感器星图模拟与快速识别星图算法研究,硕士论文,2021]采用半物理仿真系统对星图进行模拟,但是此文献没有考虑拖尾和畸变的现象。
3、上述文献依然存在星图模拟过程中未考虑运动拖尾、畸变、背景噪声以及传感器中心视轴指向南北天极的缺陷,导致模拟的星图的真实性较差。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种在轨探测图像全链路仿真方法和系统。
2、根据本发明提供的在轨探测图像全链路仿真方法,包括:
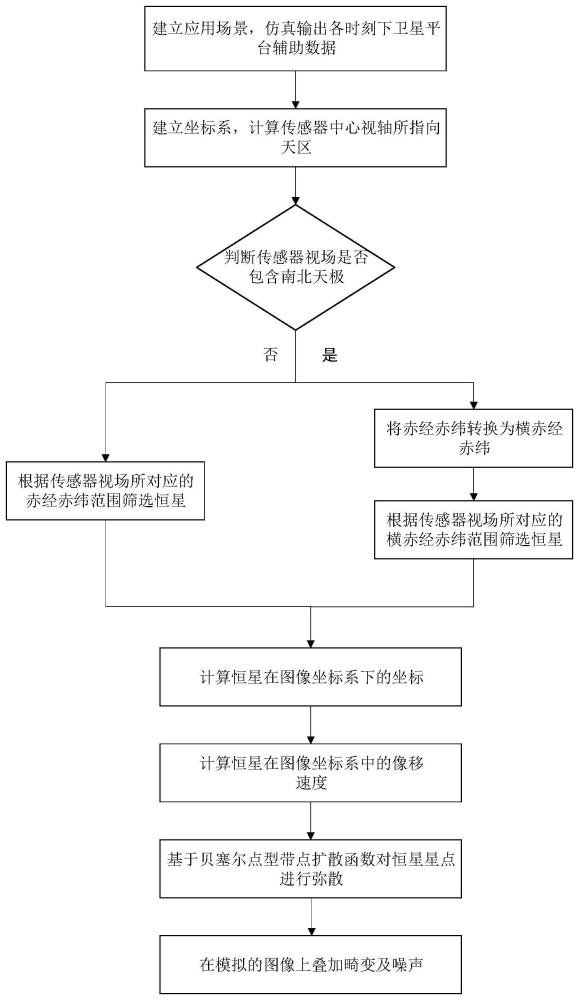
3、步骤1:建立仿真应用场景,仿真输出各时刻下平台辅助数据。
4、步骤2:建立坐标系,计算传感器中心视轴所指向的天区。
5、步骤3:遍历星表,记录出现在传感器视场中并且能够被传感器所探测到的恒星。
6、步骤4:计算恒星在图像坐标系下坐标。
7、步骤5:计算恒星在图像坐标系中的像移速度。
8、步骤6:基于贝塞尔型点扩散函数对恒星星点进行弥散。
9、步骤7:在模拟的图像上叠加畸变及噪声。
10、优选地,所述步骤2包括:
11、步骤2.1:根据卫星观测平台辅助数据,计算传感器坐标系至惯性坐标系的转换矩阵以及传感器中心视轴所指向的天区卫星观测平台辅助数据包括轨道参数、姿态参数和二维转台指向信息。
12、步骤2.1.1:建立坐标系。
13、eci惯性坐标系oi-xiyizi:以oi地心为原点的正交坐标系,xi轴由地心指向2000年元旦12点的春分点,zi轴垂直瞬时轨道面,指向北极的方向为正方向,yi轴的选取,使xi,yi,zi轴构成右手直角坐标系。
14、orb轨道坐标系oo-xoyozo:以卫星质心oo为原点的正交坐标系,zo轴由卫星指向地心,yo轴与卫星运行轨道面垂直,方向和卫星瞬时轨道面的法向量相反,xo轴按右手定则确定。
15、sat卫星本体坐标系ob-xbybzb:固连在卫星上,该坐标系是定义卫星姿态的基本坐标系;sat坐标系原点与orb坐标系原点重合,以卫星质心ob为原点的正交坐标系;xb轴为滚动轴,指向卫星飞行方向,与卫星瞬时速度方向一致;zb轴为偏航轴,始终指向底线;yb轴为俯仰轴,按右手定则确定,与卫星轨道平面垂直;当卫星三轴姿态角为零时,卫星本体坐标系与轨道坐标系重合。
16、sen传感器坐标系os-xsyszs:以透镜os为原点的正交坐标系,xs轴指向像平面中心轴方向,zs轴指向传感器视轴方向,ys轴按照右手法则确定。
17、pic图像坐标系(x,y):图像坐标系为二维坐标系,图像坐标系以像平面中心为原点的正交坐标系,x轴与xs轴方向相同,y轴与ys轴方向相同。
18、pix像素坐标系(i,j):像素坐标系为离散的图像坐标,原点在图像的左上角,i轴与x轴方向相同,j轴与y轴方向相同。
19、横惯性坐标系由惯性坐标系经过两次旋转后得到,横坐标系的与zi轴重合,与xi轴重合,与yi轴重合。在横惯性坐标系中,载体的位置p使用横赤经和横赤纬表示描述,它们的定义如下:
20、横赤经:通过p点的赤经圈与平面的夹角。
21、横赤纬:的连线与的夹角。
22、步骤2.1.2:轨道坐标系至惯性系转换矩阵计算过程为:
23、
24、
25、
26、b1=b2×b3
27、其中,分别为卫星在惯性坐标系下的位置、速度。
28、步骤2.1.3:卫星本体坐标系至轨道坐标系转换矩阵计算过程为:
29、
30、其中,yaw为偏航角,roll为滚动角,pitch为俯仰角。
31、步骤2.1.4:设传感器在卫星上的方位角和俯仰角分别为α和β,计算传感器坐标系到卫星本体坐标系的变换矩阵表达式为:
32、
33、步骤2.1.5:计算传感器坐标系至惯性坐标系的转换矩阵表达式为:
34、
35、步骤2.2:已知传感器中心视轴在传感器坐标系中的指向为w=[0 0 1]t,计算传感器中心视轴在惯性坐标系中的指向v,表达式为:
36、
37、步骤2.3:将指向v转换为赤经λ0、赤纬表达式为:
38、λ0=arctan(v2/v1),0°≤λ0<360°
39、
40、其中,v1、v2、v3分别为传感器中心视轴在惯性坐标系中x、y、z轴的指向。
41、优选地,所述步骤3包括:
42、步骤3.1:恒星的星等值小于载荷所能观测到的极限星等值。
43、步骤3.2:判断传感器视场是否包含南北极点。
44、已知传感器光轴的指向为传感器视场角为(ufov,vfov),包含在传感器视场中的恒星满足如下关系:
45、
46、其中,为星表中记录的第k颗恒星的位置信息,r为传感器视场对角线半角。
47、
48、由赤纬的定义可知,在平行于纬线的方向上视场半角r对应赤纬的变化量相同,因此出现在视场中的恒星赤纬满足如下关系式:
49、
50、若或者则传感器视场包含南北极点,否则传感器视场不包含南北极点。
51、步骤3.3:当传感器不包含南北极点时,出现在视场中恒星赤经需要满足如下条件。
52、由赤经的定义可知,在不同的纬度上其对应经度的大小是变化的,因此出现在视场中的恒星赤经满足如下关系式:
53、
54、步骤3.4:当传感器视场中包含南北极点,则将传感器光轴的指向以及星表中恒星的赤经赤纬转换为横赤经赤纬。赤经赤纬与横赤经赤纬的转换公式如下:
55、
56、
57、
58、在横惯性坐标系中传感器光轴的指向为则出现在传感器视场中的恒星的横赤经赤纬需要满足如下关系。
59、
60、
61、最后将满足条件的恒星的横赤经赤纬转换为赤经赤纬。
62、优选地,所述步骤4包括:
63、恒星的位置需考虑周年光行差、周日光行差以及周年视差的修正,恒星在惯性坐标系下的指向ueci由修正后的赤经赤纬计算得到,表达式为:
64、
65、计算恒星在传感器坐标系下的指向usen,表达式为:
66、
67、其中,分别为恒星在传感器坐标系下x、y、z轴的指向。
68、传感器的成像过程用透视投影变换表示,成像过程视为理想小孔成像,由透视投影变换几何关系得恒星在图像坐标系下的坐标(x,y),表达式为:
69、
70、
71、其中,f为传感器的焦距。
72、优选地,所述步骤5包括:
73、采用埃米尔特插值算法对位置和速度进行插值,得到曝光开始时刻t0和曝光结束时刻t1的卫星位置和速度。
74、采用四元数的四阶龙格库塔姿态递推算法,得到曝光开始时刻t0和曝光结束时刻t1的卫星姿态。
75、近似认为星点在像面上匀速运动,由步骤4计算第k个星点在曝光开始时刻t0和曝光结束时刻t1的坐标分别为(x0k,y0k)和(x1k,y1k),得第k个星点在图像坐标系下的像移速度为:
76、
77、
78、优选地,所述步骤6包括:
79、建立贝塞尔点扩散函数,表达式为:
80、
81、其中:j1为一类贝塞尔函数,daper为孔直径,f为传感器的焦距,λ为光波波长。
82、对点扩散函数进行归一化,表达式为:
83、
84、考虑星点的像移速度所造成的运动模糊,计算在曝光时间内,像素坐标系中(i,j)像元接收到的信号能量为:
85、
86、其中,i0表示单位时间内所接受到的信号能量总和,drow为行方向像元尺寸,dcol为列方向像元尺寸,(i,j)的取值为以为中心的邻域,(i0,j0)为图像坐标系的原点在像素坐标系下的位置。
87、优选地,所述步骤7包括:
88、步骤7.1:在模拟的图像上叠加畸变。
89、步骤7.1.1:在模拟的图像上叠加径向畸变,表达式为:
90、
91、步骤7.1.2:在模拟的图像上叠加切向畸变,表达式为:
92、x′=x+[2ρ1y+ρ2(r2+2x2)]
93、y′=y+[2ρ2x+ρ1(r2+2y2)]
94、其中,r2=x2+y2,k1,k2,k3,ρ1,ρ2为镜头的畸变系数。
95、步骤7.2:在叠加畸变后的图像上添加噪声。
96、将高斯噪声和椒盐噪声添加到畸变后的模拟图像上,生成一幅完整的在轨探测全链路仿真图像。
97、根据本发明提供的在轨探测图像全链路仿真系统,包括:
98、模块m1:建立仿真应用场景,仿真输出各时刻下平台辅助数据。
99、模块m2:建立坐标系,计算传感器中心视轴所指向的天区。
100、模块m3:遍历星表,记录出现在传感器视场中并且能够被传感器所探测到的恒星。
101、模块m4:计算恒星在图像坐标系下坐标。
102、模块m5:计算恒星在图像坐标系中的像移速度。
103、模块m6:基于贝塞尔型点扩散函数对恒星星点进行弥散。
104、模块m7:在模拟的图像上叠加畸变及噪声。
105、优选地,所述模块m2包括:
106、模块m2.1:根据卫星观测平台辅助数据,计算传感器坐标系至惯性坐标系的转换矩阵以及传感器中心视轴所指向的天区卫星观测平台辅助数据包括轨道参数、姿态参数和二维转台指向信息。
107、模块m2.1.1:建立坐标系。
108、eci惯性坐标系oi-xiyizi:以oi地心为原点的正交坐标系,xi轴由地心指向2000年元旦12点的春分点,zi轴垂直瞬时轨道面,指向北极的方向为正方向,yi轴的选取,使xi,yi,zi轴构成右手直角坐标系。
109、orb轨道坐标系oo-xoyozo:以卫星质心oo为原点的正交坐标系,zo轴由卫星指向地心,yo轴与卫星运行轨道面垂直,方向和卫星瞬时轨道面的法向量相反,xo轴按右手定则确定。
110、sat卫星本体坐标系ob-xbybzb:固连在卫星上,该坐标系是定义卫星姿态的基本坐标系;sat坐标系原点与orb坐标系原点重合,以卫星质心ob为原点的正交坐标系;xb轴为滚动轴,指向卫星飞行方向,与卫星瞬时速度方向一致;zb轴为偏航轴,始终指向底线;yb轴为俯仰轴,按右手定则确定,与卫星轨道平面垂直;当卫星三轴姿态角为零时,卫星本体坐标系与轨道坐标系重合。
111、sen传感器坐标系os-xsyszs:以透镜os为原点的正交坐标系,xs轴指向像平面中心轴方向,zs轴指向传感器视轴方向,ys轴按照右手法则确定。
112、pic图像坐标系(x,y):图像坐标系为二维坐标系,图像坐标系以像平面中心为原点的正交坐标系,x轴与xs轴方向相同,y轴与ys轴方向相同。
113、pix像素坐标系(i,j):像素坐标系为离散的图像坐标,原点在图像的左上角,i轴与x轴方向相同,j轴与y轴方向相同。
114、横惯性坐标系由惯性坐标系经过两次旋转后得到,横坐标系的与zi轴重合,与xi轴重合,与yi轴重合。在横惯性坐标系中,载体的位置p使用横赤经和横赤纬表示描述,它们的定义如下:
115、横赤经:通过p点的赤经圈与平面的夹角。
116、横赤纬:的连线与的夹角。
117、模块m2.1.2:轨道坐标系至惯性系转换矩阵计算过程为:
118、
119、
120、
121、b1=b2×b3
122、其中,分别为卫星在惯性坐标系下的位置、速度。
123、模块m2.1.3:卫星本体坐标系至轨道坐标系转换矩阵计算过程为:
124、
125、其中,yaw为偏航角,roll为滚动角,pitch为俯仰角。
126、模块m2.1.4:设传感器在卫星上的方位角和俯仰角分别为α和β,计算传感器坐标系到卫星本体坐标系的变换矩阵表达式为:
127、
128、模块m2.1.5:计算传感器坐标系至惯性坐标系的转换矩阵表达式为:
129、
130、模块m2.2:已知传感器中心视轴在传感器坐标系中的指向为w=[0 0 1]t,计算传感器中心视轴在惯性坐标系中的指向v,表达式为:
131、
132、模块m2.3:将指向v转换为赤经λ0、赤纬表达式为:
133、λ0=arctan(v2/v1),0°≤λ0<360°
134、
135、其中,v1、v2、v3分别为传感器中心视轴在惯性坐标系中x、y、z轴的指向。
136、优选地,所述模块m3包括:
137、模块m3.1:恒星的星等值小于载荷所能观测到的极限星等值。
138、模块m3.2:判断传感器视场是否包含南北极点。
139、已知传感器光轴的指向为传感器视场角为(ufov,vfov),包含在传感器视场中的恒星满足如下关系:
140、
141、其中,为星表中记录的第k颗恒星的位置信息,r为传感器视场对角线半角。
142、
143、由赤纬的定义可知,在平行于纬线的方向上视场半角r对应赤纬的变化量相同,因此出现在视场中的恒星赤纬满足如下关系式:
144、
145、若或者则传感器视场包含南北极点,否则传感器视场不包含南北极点。
146、模块m3.3:当传感器不包含南北极点时,出现在视场中恒星赤经需要满足如下条件。
147、由赤经的定义可知,在不同的纬度上其对应经度的大小是变化的,因此出现在视场中的恒星赤经满足如下关系式:
148、
149、模块m3.4:当传感器视场中包含南北极点,则将传感器光轴的指向以及星表中恒星的赤经赤纬转换为横赤经赤纬。赤经赤纬与横赤经赤纬的转换公式如下:
150、
151、
152、
153、在横惯性坐标系中传感器光轴的指向为则出现在传感器视场中的恒星的横赤经赤纬需要满足如下关系。
154、
155、
156、最后将满足条件的恒星的横赤经赤纬转换为赤经赤纬。
157、优选地,所述模块m4包括:
158、恒星的位置需考虑周年光行差、周日光行差以及周年视差的修正,恒星在惯性坐标系下的指向ueci由修正后的赤经赤纬计算得到,表达式为:
159、
160、计算恒星在传感器坐标系下的指向usen,表达式为:
161、
162、其中,分别为恒星在传感器坐标系下x、y、z轴的指向。
163、传感器的成像过程用透视投影变换表示,成像过程视为理想小孔成像,由透视投影变换几何关系得恒星在图像坐标系下的坐标(x,y),表达式为:
164、
165、
166、其中,f为传感器的焦距。
167、优选地,所述模块m5包括:
168、采用埃米尔特插值算法对位置和速度进行插值,得到曝光开始时刻t0和曝光结束时刻t1的卫星位置和速度。
169、采用四元数的四阶龙格库塔姿态递推算法,得到曝光开始时刻t0和曝光结束时刻t1的卫星姿态。
170、近似认为星点在像面上匀速运动,由模块m4计算第k个星点在曝光开始时刻t0和曝光结束时刻t1的坐标分别为(x0k,y0k)和(x1k,y1k),得第k个星点在图像坐标系下的像移速度为:
171、
172、
173、优选地,所述模块m6包括:
174、建立贝塞尔点扩散函数,表达式为:
175、
176、其中:j1为一类贝塞尔函数,daper为孔直径,f为传感器的焦距,λ为光波波长。
177、对点扩散函数进行归一化,表达式为:
178、
179、考虑星点的像移速度所造成的运动模糊,计算在曝光时间内,像素坐标系中(i,j)像元接收到的信号能量为:
180、
181、其中,i0表示单位时间内所接受到的信号能量总和,drow为行方向像元尺寸,dcol为列方向像元尺寸,(i,j)的取值为以为中心的邻域,(i0,j0)为图像坐标系的原点在像素坐标系下的位置。
182、优选地,所述模块m7包括:
183、模块m7.1:在模拟的图像上叠加畸变。
184、模块m7.1.1:在模拟的图像上叠加径向畸变,表达式为:
185、
186、模块m7.1.2:在模拟的图像上叠加切向畸变,表达式为:
187、x′=x+[2ρ1y+ρ2(r2+2x2)]
188、y′=y+[2ρ2x+ρ1(r2+2y2)]
189、其中,r2=x2+y2,k1,k2,k3,ρ1,ρ2为镜头的畸变系数。
190、模块m7.2:在叠加畸变后的图像上添加噪声。
191、将高斯噪声和椒盐噪声添加到畸变后的模拟图像上,生成一幅完整的在轨探测全链路仿真图像。
192、与现有技术相比,本发明具有如下的有益效果:
193、(1)本发明通过引入横惯性坐标系,解决了传感器视场包含极点时经线圈快速汇聚的问题。
194、(2)本发明通过计算曝光开始时刻和曝光结束时刻某星点在图像上的位置求解此星点的像移,原理简单,计算量小;
195、(3)本发明基于贝塞尔点扩散函数对星点进行弥散,可较为真实的模拟光学成像系统成像;
196、(4)本发明能够较为真实的模拟在轨探测图像,可用于航天传感器标定算法、星图匹配算法及目标视线校正算法的验证。
- 还没有人留言评论。精彩留言会获得点赞!