一种基于体素采样的地面分割优化方法、装置与流程
本发明涉及自动驾驶,具体涉及一种基于体素采样的地面分割优化方法、装置。
背景技术:
1、环境感知是智能网联汽车所必备的关键能力,能够为车辆自动驾驶提供周边信息以供决策。由于现实行车环境的复杂性,通常需要不同种类的车载传感器协同工作以满足感知需求。激光雷达通过采集点云可以提供周遭感知目标的位置信息,是l3+车规级的自动驾驶系统所必要的硬件组件之一。典型激光雷达采用阵列架构的激光发射器和接收器,通过密集发射多通道激光束流来采集不同梯度位置的感知内容,并可以借助内部旋转装置实现水平方向360°全空间的信息收集。
2、鉴于环境感知的对象多为地面上的障碍物,而地面点云和目标点云的混杂会对障碍物的聚类造成影响,降低目标检测的精准度,因此从点云中分离出地面部分和非地面部分的地面分割技术也就因此成为了激光雷达感知中一步必要的预处理操作。
3、在相关技术中,为实现地面分割,通常采用网格的方式,将点云数据分割为不同的网格,使用每个网格中包含的点云的特征组合作为新网格的特征并进行点云分类,从而在一定程度上保留点云集的几何特征,并且该种方式不依赖于场景,可以适用于凹凸不平的地面环境。但在该种方式中,由于采用网格的方式对点云数据进行分类,网格的大小以及划分方式与分割精度息息相关,在网格过大时,将导致分割精度,而在网格过小时,将造成需要处理的三维点云的计算量十分庞大导致运算速率的降低,并且在对点云数据的分类过程中,是将数据以不同形状的单元进行划分,而不同单元之间的划分方式无法统一使得在进行地面分割前需要对数据进行维度的调整,从而以调整后的数据进行读取计算,而这也进一步加大了数据的计算量。
技术实现思路
1、有鉴于此,本发明提供了一种基于体素采样的地面分割优化方法、装置,以解决现有地面分割算法中计算效率低的技术问题。
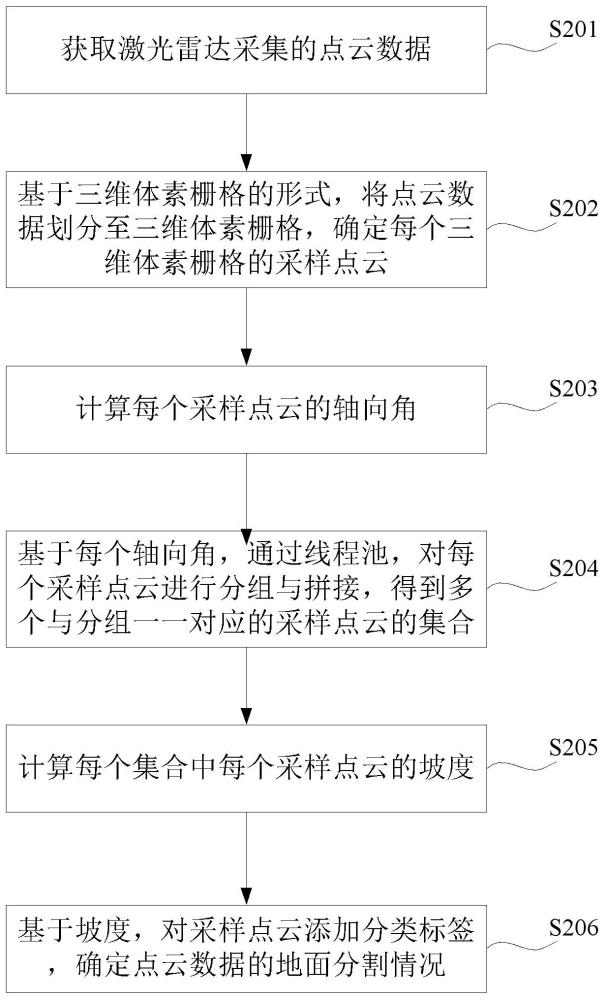
2、第一方面,本发明提供了一种基于体素采样的地面分割优化方法,包括:获取激光雷达采集的点云数据;基于三维体素栅格的形式,将点云数据划分至三维体素栅格,确定每个三维体素栅格的采样点云;计算每个采样点云的轴向角;基于每个轴向角,通过线程池,对每个采样点云进行分组与拼接,得到多个与分组一一对应的采样点云的集合;计算每个集合中每个采样点云的坡度;基于坡度,对采样点云添加分类标签,确定点云数据的地面分割情况。
3、结合第一方面,在第一方面的一种可能的实现方式中,基于三维体素栅格的形式,将点云数据划分至三维体素栅格,确定每个三维体素栅格的采样点云,包括:基于三维体素栅格的形式,将点云数据划分至三维体素栅格,建立每个点云数据与三维体素栅格的关联关系;基于关联关系,确定每个三维体素栅格的采样点云。
4、结合第一方面,在第一方面的一种可能的实现方式中,基于三维体素栅格的形式,将点云数据划分至三维体素栅格,建立每个点云数据与三维体素栅格的关联关系,包括:基于线程池中线程的数量,遍历点云数据,确定包裹点云数据的最小长方体;将最小长方体划分为均匀的三维体素栅格,并确定每个三维体素栅格的尺寸;将点云数据划分至每个三维体素栅格;基于尺寸,确定每个点云数据与每个三维体素栅格的关联关系。
5、结合第一方面,在第一方面的一种可能的实现方式中,基于线程池中线程的数量,遍历点云数据,确定包裹点云数据的最小长方体,包括:基于线程池中线程的数量,将点云数据均分;遍历每个线程中的点云数据,确定对应点云数据的最大值与最小值;基于与每个线程对应的最大值与最小值,确定包裹点云的最小长方体的顶点位置与边长。
6、结合第一方面,在第一方面的一种可能的实现方式中,基于关联关系,确定每个三维体素栅格的采样点云,包括:基于关联关系,确定每个三维体素栅格的重心;计算每个三维体素栅格中点云数据与重心的距离;基于距离,确定每个三维体素栅格的采样点云。
7、结合第一方面,在第一方面的一种可能的实现方式中,关联关系包括:点云数据的栅格编号,在基于关联关系,确定每个三维体素栅格的重心之后,还包括:基于线程中线程的数量,将每个三维体素栅格中的点云数据的栅格编号进行一维编码转换。
8、结合第一方面,在第一方面的一种可能的实现方式中,基于每个轴向角,通过线程池,对每个采样点云进行分组与拼接,得到多个与分组一一对应的采样点云的集合,包括:基于线程池中线程的数量,将采样点云均匀拆分,建立每个线程与采样点云的第一对应关系;基于每个轴向角与第一对应关系,在每个线程中将对应的采样点云划分到对应的扇形区域中;基于每个扇形区域,形成采样点云的分组;基于线程池中线程的数量,将分组均匀拆分,建立每个线程与分组的第二对应关系;基于第二对应关系,将每个分组内的采样点云分别进行拼接,得到多个与分组一一对应的采样点云的集合。
9、结合第一方面,在第一方面的一种可能的实现方式中,基于每个轴向角与第一对应关系,在每个线程中将对应的采样点云划分到对应的扇形区域中,包括:基于每个轴向角,通过旋转角度与水平角分辨率,确定多个扇形区域;基于每个轴向角,通过第一对应关系,在每个线程中将对应的采样点云划分到对应的扇形区域中。
10、结合第一方面,在第一方面的一种可能的实现方式中,计算每个集合中每个采样点云的坡度,包括:基于集合,确定每个集合中每个采样点云的轴向距离;基于轴向距离,升序遍历每个集合中的采样点云,计算每个采样点云的坡度。
11、结合第一方面,在第一方面的一种可能的实现方式中,基于集合,确定每个集合中每个采样点云的轴向距离,包括:基于线程池中线程的数量,将不同的集合分别分配至线程;在每个线程中分别计算对应集合中每个采样点云的轴向距离。
12、结合第一方面,在第一方面的一种可能的实现方式中,基于轴向距离,升序遍历每个集合中的采样点云,计算每个采样点云的坡度,包括:基于轴向距离,升序遍历每个集合中的采样点云;依次计算升序后的每个采样点云的全局坡度;依次计算升序后的每个采样点云的相对坡度。
13、结合第一方面,在第一方面的一种可能的实现方式中,对采样点云添加分类标签,确定点云数据的地面分割情况,包括:基于每个全局坡度与每个相对坡度,对对应采样点云添加分类标签;基于分类标签,确定与对应采样点云属于同一三维体素栅格的点云数据的地面分割情况。
14、第二方面,本发明提供了一种基于体素采样的地面分割优化装置,包括:获取模块,用于获取激光雷达采集的点云数据;采样点云确定模块,用于基于三维体素栅格的形式,将点云数据划分至三维体素栅格,确定每个三维体素栅格的采样点云;轴向角计算模块,用于计算每个采样点云的轴向角;分组与拼接模块,用于基于每个轴向角,通过线程池,对每个采样点云进行分组与拼接,得到多个与分组一一对应的采样点云的集合;坡度计算模块,用于计算每个集合中每个采样点云的坡度;分割模块,用于基于坡度,对采样点云添加分类标签,确定点云数据的地面分割情况。
15、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的基于体素采样的地面分割优化方法。
16、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的基于体素采样的地面分割优化方法。
17、本发明技术方案,具有如下优点:
18、本发明提供的一种基于体素采样的地面分割优化方法、装置,该方法以三维体素栅格的形式划分激光雷达点云,并根据数据样本的大小进行合适的降采样,获取每个三维体素栅格的采样点云,并利用采样点云的轴向角信息对其进行分组,最终通过计算每组采样点云的坡度特征,确定点云数据的地面分割情况。这一过程中,通过将点云数据划分至三维体素栅格中,以每个三维体素栅格确定的采样点云表征属于同一栅格内的点云数据,并使用计算轴向角的方式完成采样点云的分类,体素栅格兼具数据稀疏化和点云划分的功能,复用网格可以规避数据重复读写所造成的时间消耗,此外在地面分割的过程中,利用线程池,并行加速采样点云的分组、拼接、排序及分类过程,从而提升点云数据的运算效率。
- 还没有人留言评论。精彩留言会获得点赞!