一种多视场协同光学测量组件的在轨软件重构方法与流程
本发明涉及一种多视场协同光学测量组件的在轨软件重构方法。
背景技术:
1、光学测量组件是一种以恒星为参照系,以星空为工作对象的高精度的空间姿态测量装置,是迄今为止最精密且漂移最小的姿态测量部件,经常为卫星提供准确的空间方位和基准,并且与惯性陀螺一样都具有自主导航的能力,具有极为重要的应用价值。随着技术的发展和基本功能的强大,光学测量组件的应用领域越来越广泛。光学测量组件作为一种高精度的惯性姿态测量仪器,在轨使用不仅影响卫星姿态控制精度,更直接决定有效载荷视轴指向确定和图像定位精度,需要通过多视场协同光学测量组件间以及多视场协同光学测量组件与载荷间指向对时间基准不同步、支架基准动态时变(空间外热流影响)、观测天区内恒星分布不均匀和数量不一致、光行差等因素进行量化分析与评估。
2、这里的陈述仅提供与本发明有关的背景技术,而并不必然地构成现有技术。
技术实现思路
1、本发明的目的在于提供一种多视场协同光学测量组件的在轨软件重构方法,提高了多视场协同光学测量组件在轨运行时的可靠性,新增多视场协同光学测量组件fpga的在轨编程功能,拓展了多视场协同光学测量组件不同的功能。
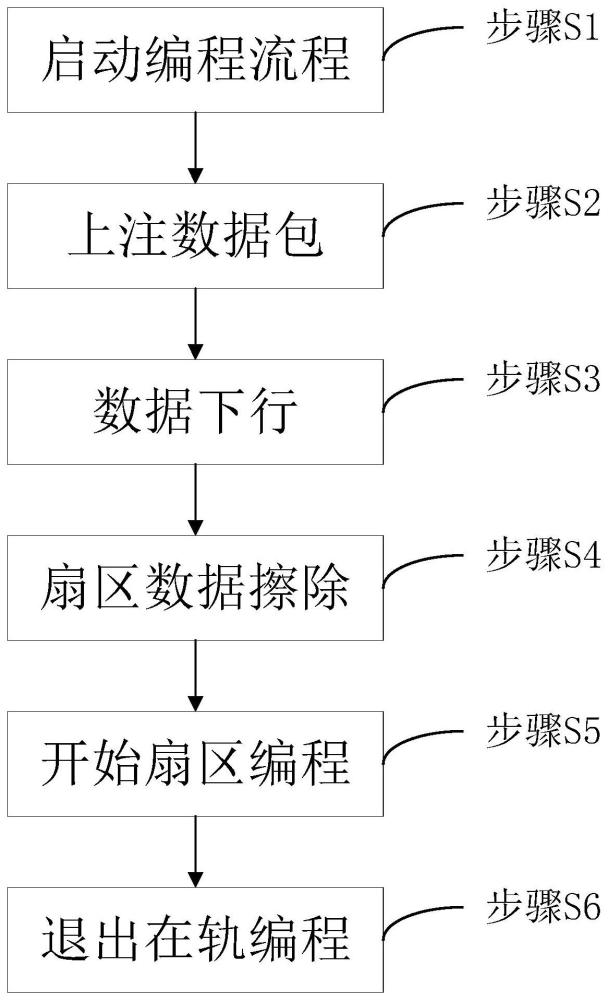
2、为了达到上述目的,本发明提供一种多视场协同光学测量组件的在轨软件重构方法,在轨的光学测量组件接收地面发送的启动光学测量组件fpga在轨编程指令后,启动在轨编程流程;在轨的光学测量组件接收地面上注的编程数据包;在轨的光学测量组件接收地面发送的扇区擦除指令后,启动对光学测量组件中焊接的刷新芯片的擦除操作;在轨的光学测量组件接收地面发送的扇区编程指令后,启动对光学测量组件中焊接的刷新芯片的编程操作;在轨的光学测量组件接收地面发送的关闭光学测量组件fpga在轨编程指令后,退出在轨编程流程。
3、所述启动光学测量组件fpga在轨编程指令包含:需在轨编程的扇区号和fpga编程状态信息,所述编程状态信息包含:命令应答字,crc校验结果,擦除结果,编程结果。
4、所述启动在轨编程流程的方法包含:在轨的光学测量组件更新编程状态信息,向光学测量组件中焊接的刷新芯片发送遥测关闭指令,停止所述刷新芯片和所述光学测量组件之间的通讯,在轨编程结束前,停止除在轨编程外的其余功能。
5、在轨的光学测量组件在接收到编程数据包后,将数据在fpga中保存三份。
6、在轨的光学测量组件收到地面发送的编程数据包后,在发送地面的编程状态信息中给出命令应答字和crc校验结果,地面根据所述crc校验结果判断软件上注成功后,允许向在轨的光学测量组件发送扇区擦除指令和扇区编程指令。
7、所述擦除操作包含:在轨的光学测量组件向刷新芯片发送定时刷新关闭指令,确认定时刷新关闭后,再向刷新芯片发送flash扇区擦除指令,刷新芯片进行擦除操作;在轨的光学测量组件将擦除结果更新至编程状态信息发送给地面,地面根据所述编程状态信息判断擦除成功后,允许向在轨的光学测量组件发送扇区编程指令。
8、所述编程操作包含:在轨的光学测量组件向刷新芯片发送编程数据包,刷新芯片进行编程操作;在轨的光学测量组件将编程结果更新至编程状态信息发送给地面,地面根据所述编程状态信息判断编程结束后,允许向在轨的光学测量组件发送关闭光学测量组件fpga在轨编程指令。
9、所述退出在轨编程流程的方法包含:在轨的光学测量组件开启所述刷新芯片的定时刷新,并开启所述刷新芯片和所述光学测量组件之间的通讯,在轨的光学测量组件将更新编程状态信息发送给地面,退出在轨编程。
10、本发明提高了多视场协同光学测量组件在轨运行时的可靠性,保证了多视场协同光学测量组件其他功能不受影响的前提下,新增多视场协同光学测量组件fpga的在轨编程功能,从而能够实现完成和刷新芯片的通讯,监视fpga日常健康状态,通过刷新芯片对flash进行擦除、编程、crc检测等操作,拓展了多视场协同光学测量组件不同的功能。
技术特征:
1.一种多视场协同光学测量组件的在轨软件重构方法,其特征在于,在轨的光学测量组件接收地面发送的启动光学测量组件fpga在轨编程指令后,启动在轨编程流程;在轨的光学测量组件接收地面上注的编程数据包;在轨的光学测量组件接收地面发送的扇区擦除指令后,启动对光学测量组件中焊接的刷新芯片的擦除操作;在轨的光学测量组件接收地面发送的扇区编程指令后,启动对光学测量组件中焊接的刷新芯片的编程操作;在轨的光学测量组件接收地面发送的关闭光学测量组件fpga在轨编程指令后,退出在轨编程流程。
2.如权利要求1所述的多视场协同光学测量组件的在轨软件重构方法,其特征在于,所述启动光学测量组件fpga在轨编程指令包含:需在轨编程的扇区号和fpga编程状态信息,所述编程状态信息包含:命令应答字,
3.如权利要求2所述的多视场协同光学测量组件的在轨软件重构方法,其特征在于,所述启动在轨编程流程的方法包含:在轨的光学测量组件更新编程状态信息,向光学测量组件中焊接的刷新芯片发送遥测关闭指令,停止所述刷新芯片和所述光学测量组件之间的通讯,在轨编程结束前,停止除在轨编程外的其余功能。
4.如权利要求3所述的多视场协同光学测量组件的在轨软件重构方法,其特征在于,在轨的光学测量组件在接收到编程数据包后,将数据在fpga中保存三份。
5.如权利要求4所述的多视场协同光学测量组件的在轨软件重构方法,其特征在于,在轨的光学测量组件收到地面发送的编程数据包后,在发送地面的编程状态信息中给出命令应答字和crc校验结果,地面根据所述crc校验结果判断软件上注成功后,允许向在轨的光学测量组件发送扇区擦除指令和扇区编程指令。
6.如权利要求5所述的多视场协同光学测量组件的在轨软件重构方法,其特征在于,所述擦除操作包含:在轨的光学测量组件向刷新芯片发送定时刷新关闭指令,确认定时刷新关闭后,再向刷新芯片发送flash扇区擦除指令,刷新芯片进行擦除操作;在轨的光学测量组件将擦除结果更新至编程状态信息发送给地面,地面根据所述编程状态信息判断擦除未成功,则不发送扇区编程指令,仅在擦除成功后,允许向在轨的光学测量组件发送扇区编程指令。
7.如权利要求6所述的多视场协同光学测量组件的在轨软件重构方法,其特征在于,所述编程操作包含:在轨的光学测量组件向刷新芯片发送编程数据包,刷新芯片进行编程操作;在轨的光学测量组件将编程结果更新至编程状态信息发送给地面,地面根据所述编程状态信息判断编程未结束,则不发送关闭光学测量组件fpga在轨编程指令,仅在编程结束后,允许向在轨的光学测量组件发送关闭光学测量组件fpga在轨编程指令。
8.如权利要求7所述的多视场协同光学测量组件的在轨软件重构方法,其特征在于,所述退出在轨编程流程的方法包含:在轨的光学测量组件开启所述刷新芯片的定时刷新,并开启所述刷新芯片和所述光学测量组件之间的通讯,在轨的光学测量组件将更新的编程状态信息发送给地面,退出在轨编程。
技术总结
一种多视场协同光学测量组件的在轨软件重构方法,在轨的光学测量组件接收地面发送的启动光学测量组件FPGA在轨编程指令后,启动在轨编程流程;接收地面上注的编程数据包;接收地面发送的扇区擦除指令后,启动对光学测量组件中焊接的刷新芯片的擦除操作;接收地面发送的扇区编程指令后,启动对光学测量组件中焊接的刷新芯片的编程操作;接收地面发送的关闭光学测量组件FPGA在轨编程指令后,退出在轨编程流程。本发明提高了多视场协同光学测量组件在轨运行时的可靠性,新增多视场协同光学测量组件FPGA的在轨编程功能,拓展了多视场协同光学测量组件不同的功能。
技术研发人员:杜宇石,徐洋波,练达,毛晓楠,董帅,周琦,马英超,李立斌,施维捷
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!