基于视频识别现场波高和周期的方法、装置、系统及介质与流程
本发明属于海洋工程,尤其涉及一种基于视频识别现场波高和周期的方法、装置、系统及介质。
背景技术:
1、在海洋工程领域,准确测量海浪的波高对于海上结构物的设计、工程施工和海洋预报具有重要意义。波浪是海洋结构物所受到的主要外部载荷之一。通过实测波浪数据,可以获取波浪高度和周期等参数,为海洋结构物的设计和安全评估提供准确的输入参数。这有助于确保结构物的稳定性、可靠性和安全性。在海岸工程规划中,波浪实测数据对于评估海岸侵蚀、波浪冲击、波浪能利用等方面至关重要。实测数据可以提供详细的波浪特征,包括波浪高度、周期、能量谱等,从而为海岸工程的设计、海岸防护措施的制定和修订提供准确的依据。在沿海工程施工中,如港口建设、海上风电场建设等,波浪实测数据对于制定施工计划和决策至关重要。实测数据可以提供关键的波浪参数,如最大波高、最大波浪周期等,帮助确定施工时间窗口和制定相应的安全措施,以确保施工过程的顺利进行。此外,波浪实测数据对于船舶运行和安全具有重要意义。船舶在波浪中的运行状态和性能直接受波浪条件的影响。准确的波浪数据可以帮助船舶船员和航海员预测和适应不同的波浪环境,以确保船舶的航行安全和货物的稳定性。
技术实现思路
1、本发明的目的在于提供一种基于视频识别现场波高和周期的方法、装置、系统及介质,通过对现场海浪视频的处理和分析,实现对波浪的波高和周期测量,具有简单、准确和实时的特点。
2、本发明是通过以下技术方案实现的:
3、一种基于视频识别现场波高和周期的方法,包括以下步骤:
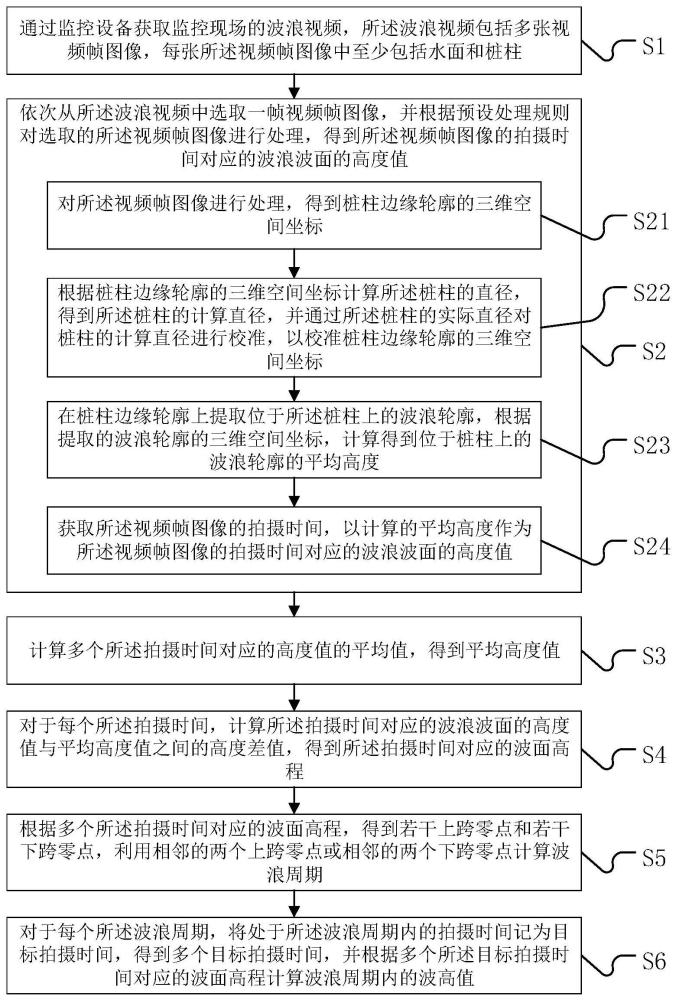
4、s1、通过监控设备获取监控现场的波浪视频,波浪视频包括多张视频帧图像,每张视频帧图像中至少包括水面和桩柱;
5、s2、依次从波浪视频中选取一帧视频帧图像,并根据预设处理规则对选取的视频帧图像进行处理,得到视频帧图像的拍摄时间对应的波浪波面的高度值,其中根据预设处理规则对选取的视频帧图像进行处理的步骤包括:
6、s21、对视频帧图像进行处理,得到桩柱边缘轮廓的三维空间坐标;
7、s22、根据桩柱边缘轮廓的三维空间坐标计算桩柱的直径,得到桩柱的计算直径,并通过桩柱的实际直径对桩柱的计算直径进行校准,以校准桩柱边缘轮廓的三维空间坐标;
8、s23、在桩柱边缘轮廓上提取位于桩柱上的波浪轮廓,根据提取的波浪轮廓的三维空间坐标,计算得到位于桩柱上的波浪轮廓的平均高度;
9、s24、获取视频帧图像的拍摄时间,以计算的平均高度作为视频帧图像的拍摄时间对应的波浪波面的高度值;
10、s3、计算多个拍摄时间对应的高度值的平均值,得到平均高度值;
11、s4、对于每个拍摄时间,计算拍摄时间对应的波浪波面的高度值与平均高度值之间的高度差值,得到拍摄时间对应的波面高程;
12、s5、根据多个拍摄时间对应的波面高程,得到若干上跨零点和若干下跨零点,利用相邻的两个上跨零点或相邻的两个下跨零点计算波浪周期;
13、s6、对于每个波浪周期,将处于波浪周期内的拍摄时间记为目标拍摄时间,得到多个目标拍摄时间,并根据多个目标拍摄时间对应的波面高程计算波浪周期内的波高值。
14、进一步地,对视频帧图像进行处理,得到视频帧图像上桩柱边缘轮廓的三维空间坐标的步骤包括:
15、s211、对视频帧图像进行轮廓提取,得到桩柱边缘轮廓;
16、s212、对视频帧图像进行三维重建,得到桩柱边缘轮廓的三维像素坐标;
17、s213、根据桩柱边缘轮廓的三维像素坐标计算柱边缘轮廓三维空间坐标。
18、进一步地,根据桩柱边缘轮廓的三维空间坐标计算桩柱的直径,得到桩柱的计算直径的步骤包括:
19、s221、在桩柱边缘轮廓上提取桩柱顶部边缘轮廓;
20、s222、对于桩柱顶部边缘轮廓的多个轮廓点,基于多个轮廓点的三维空间坐标,两两计算两个轮廓点之间的距离,并将最大的计算距离作为计算桩柱的计算直径。
21、进一步地,通过桩柱的实际直径对桩柱的计算直径进行校准,以校准桩柱边缘轮廓的三维空间坐标的步骤包括:
22、s223、计算桩柱的实际直径与计算直径之间的直径差值,并判断直径差值是否在预设的误差范围内,若是,则无需对桩柱边缘轮廓的三维空间坐标进行校准,若否,则进入步骤s224;
23、s224、判断直径差值是否大于0,若是,则进入步骤s225,若否,则进入步骤s226;
24、s225、将桩柱边缘轮廓的三维空间坐标乘以预设的第一校准因子,得到新的桩柱边缘轮廓的三维空间坐标;
25、s226、将桩柱边缘轮廓的三维空间坐标乘以预设的第二校准因子,得到新的桩柱边缘轮廓的三维空间坐标;
26、s227、根据桩柱边缘轮廓的三维空间坐标计算桩柱的直径,重复步骤s223,直到直径差值在预设的误差范围内。
27、进一步地,根据多个拍摄时间对应的波面高程,得到若干上跨零点和若干下跨零点的步骤包括:
28、s51、在多个拍摄时间中依次选取一个拍摄时间作为基准拍摄时间;
29、s52、计算基准拍摄时间对应的波面高程和位于基准拍摄时间后一个的拍摄时间对应的波面高程的乘值,并判断乘值是否小于0;
30、s53、若乘值小于0,则计算基准拍摄时间和位于基准拍摄时间后一个拍摄时间之间波面高程等于0的时刻,若基准拍摄时间对应的波面高程大于0,则将计算的时刻记为下跨零点,若基准拍摄时间对应的波面高程小于0,则将计算的时刻记为上跨零点。
31、进一步地,根据多个目标拍摄时间对应的波面高程计算波浪周期内的波高值的步骤包括:
32、s61、将多个拍摄时间的波面高程进行对比,将最大的波面高程作为波峰值,将最小的波面高程作为波谷值,计算波峰值和波谷值之间的差值,得到波浪周期内的波高值。
33、进一步地,依次从波浪视频中选取一帧视频帧图像,并根据预设处理规则对选取的视频帧图像进行处理的步骤之后,方法还包括:
34、s2a、判断是否接收到读取结束指令;
35、s2b、若是,则结束从波浪视频中选取视频帧图像。
36、本发明还提供了一种基于视频识别现场波高和周期的装置,包括:
37、获取模块,用于通过监控设备获取监控现场的波浪视频,波浪视频包括多张视频帧图像,每张视频帧图像中至少包括水面和桩柱;
38、选取模块,用于依次从波浪视频中选取一帧视频帧图像,并根据预设处理规则对选取的视频帧图像进行处理,得到视频帧图像的拍摄时间对应的波浪波面的高度值;其中选取模块包括处理子模块、校准子模块、提取子模块和获取子模块;
39、处理子模块,用于对视频帧图像进行处理,得到桩柱边缘轮廓的三维空间坐标;
40、校准子模块,用于根据桩柱边缘轮廓的三维空间坐标计算桩柱的直径,得到桩柱的计算直径,并通过桩柱的实际直径对桩柱的计算直径进行校准,以校准桩柱边缘轮廓的三维空间坐标;
41、提取子模块,用于在桩柱边缘轮廓上提取位于桩柱上的波浪轮廓,根据提取的波浪轮廓的三维空间坐标,计算得到位于桩柱上的波浪轮廓的平均高度;
42、获取子模块,用于获取视频帧图像的拍摄时间,以计算的平均高度作为视频帧图像的拍摄时间对应的波浪波面的高度值;
43、第一计算模块,用于计算多个拍摄时间对应的高度值的平均值,得到平均高度值;
44、第二计算模块,用于对于每个拍摄时间,计算拍摄时间对应的波浪波面的高度值与平均高度值之间的高度差值,得到拍摄时间对应的波面高程;
45、零点模块,用于根据多个拍摄时间对应的波面高程,得到若干上跨零点和若干下跨零点,利用相邻的两个上跨零点或相邻的两个下跨零点计算波浪周期;
46、第三计算模块,用于对于每个波浪周期,将处于波浪周期内的拍摄时间记为目标拍摄时间,得到多个目标拍摄时间,并根据多个目标拍摄时间对应的波面高程计算波浪周期内的波高值。
47、本发明还提供一种现场波高和周期测量系统,包括:
48、处理器;
49、监控设备,监控设备与处理器连接;
50、存储器,用于存储可执行的计算机程序;
51、其中,处理器执行计算机程序时实现上述任一项方法的步骤。
52、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述任一项方法的步骤。
53、相比于现有技术,本发明的有益效果为:通过对现场海浪视频的处理和分析,结合水面和桩柱等现场信息,实现对波浪的波高和周期测量,无需使用复杂的仪器和设备,只需设置监控设备和桩柱即可,不仅提高了测量精度,降低了投入成本,还能直观反映海浪变化,满足了海洋工程的实时监测需求;从而实现了经济实用、精确可靠的波浪监测;另外通过校准技术,提高了波浪视频中的特征点的定位精度,从而提高了波浪的波高和周期的测量精度,减少了误差和噪声的影响。
- 还没有人留言评论。精彩留言会获得点赞!