点云数据标注方法、装置、电子设备、车辆及介质与流程
本公开涉及数据处理,具体而言,涉及一种点云数据标注方法、装置、电子设备、车辆及介质。
背景技术:
1、随着自动驾驶技术的不断发展,为了能够提升车辆行驶的安全性,通常需要在车辆行驶过程中自动对车辆周围的物体(如道路和交通设施等)和行人等对象进行识别。相关技术中,主要利用机器学习模型从点云数据中识别出周围环境中的目标对象,而机器学习模型的构建需要依赖大量的标注有目标对象的点云样本数据,因此,如何提升点云数据的标注精度以及效率是业界一直追求的目标。
技术实现思路
1、本公开实施例至少提供一种点云数据标注方法、装置、电子设备、车辆及介质,可以提升点云数据的标注精度以及标注效率。
2、本公开实施例提供了一种点云数据标注方法,包括:
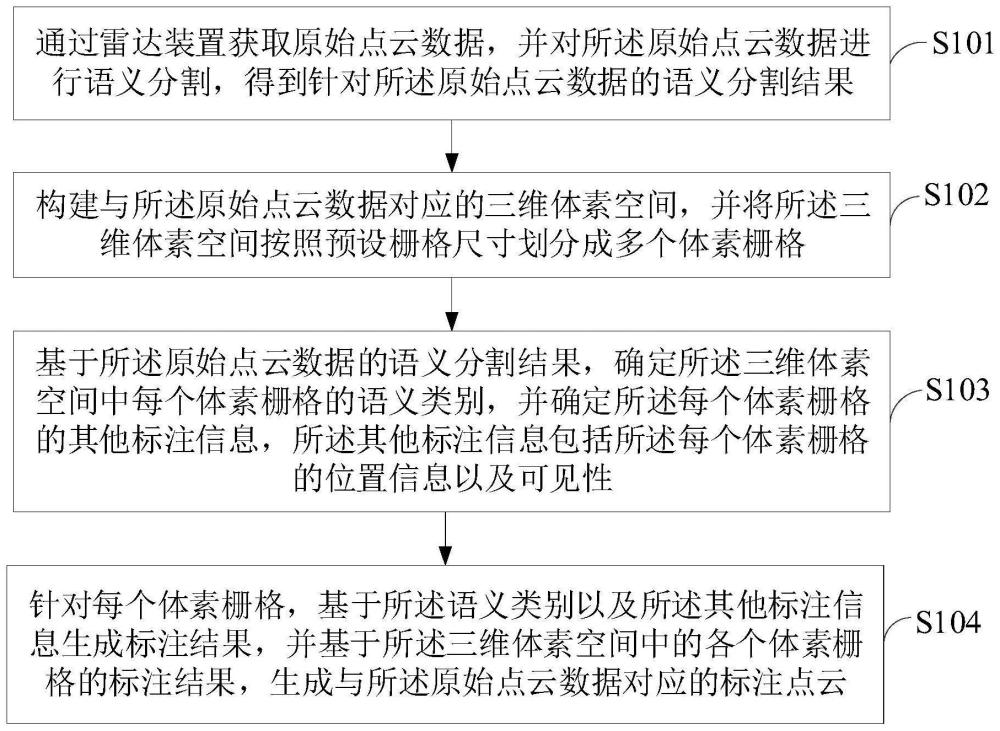
3、通过雷达装置获取原始点云数据,并对所述原始点云数据进行语义分割,得到针对所述原始点云数据的语义分割结果;
4、构建与所述原始点云数据对应的三维体素空间,并将所述三维体素空间按照预设栅格尺寸划分成多个体素栅格;
5、基于所述原始点云数据的语义分割结果,确定所述三维体素空间中每个体素栅格的语义类别,并确定所述每个体素栅格的其他标注信息,所述其他标注信息包括所述每个体素栅格的位置信息以及可见性;
6、针对所述每个体素栅格,基于所述语义类别以及所述其他标注信息生成标注结果,并基于所述三维体素空间中的各个体素栅格的标注结果,生成与所述原始点云数据对应的标注点云。
7、在一种可能的实施方式中,所述通过雷达装置获取原始点云数据,并对所述原始点云数据进行语义分割,得到针对所述原始点云数据的语义分割结果,包括:
8、通过所述雷达装置获取所述原始点云数据,并通过图像采集装置获取第一图像数据,其中,所述原始点云数据与所述第一图像数据对应于同一场景;
9、对所述第一图像数据进行图像分割处理,得到图像分割处理后的第二图像数据,并基于所述第二图像数据的图像分割结果,对所述原始点云数据进行语义分割处理,得到针对所述原始点云数据的语义分割结果。
10、在一种可能的实施方式中,所述基于所述原始点云数据的语义分割结果,确定所述三维体素空间中每个体素栅格的语义类别,包括:
11、针对所述原始点云中的每个点云点,从所述三维体素空间中确定与所述点云点距离最近的目标体素栅格,并将所述点云点存放于所述目标体素栅格中,以基于所述点云点的语义类别确定所述目标体素栅格的语义类别。
12、在一种可能的实施方式中,所述基于所述点云点的语义类别确定所述目标体素栅格的语义类别,包括:
13、在所述目标体素栅格中仅存在一个点云点的情况下,将所述一个点云点的语义类别作为所述目标体素栅格的语义类别;
14、在所述目标体素栅格中存在多个点云点的情况下,将数量最多的语义类别作为所述目标体素栅格的语义类别。
15、在一种可能的实施方式中,所述体素栅格的尺寸与所述三维体素空间的大小正相关。
16、在一种可能的实施方式中,所述确定所述每个体素栅格的其他标注信息,包括:
17、以所述雷达装置的载体的位置为基准,确定所述每个体素栅格的位置信息;
18、针对所述每个体素栅格,以所述体素栅格以及雷达装置之间的连线上是否存在障碍物,确定所述体素栅格是否可见。
19、在一种可能的实施方式中,所述以所述体素栅格以及雷达装置之间的连线上是否存在障碍物,确定所述体素栅格是否可见,包括:
20、以所述体素栅格为起点朝着所述雷达装置绘制直线,若中途遇到障碍物,则确定所述体素栅格相对所述雷达装置不可见。
21、在一种可能的实施方式中,在所述确定所述每个体素栅格的其他标注信息之前,所述方法还包括:
22、在所述三维体素空间中存在语义类别为路面的第一体素栅格的情况下,对所述三维空间内的第一体素栅格进行路面拟合,得到路面拟合后的三维体素空间。
23、在一种可能的实施方式中,所述对所述三维空间内的第一体素栅格进行路面拟合,得到路面拟合后的三维体素空间,包括:
24、将所述三维体素空间沿着横向和纵向按照预设尺寸进行切割得到多个子体素空间,各个所述子体素空间的高度与所述三维体素空间的高度相同;
25、针对每个子体素空间,采用预设拟合算法对所述子体素空间内的语义类别为路面的第一体素栅格进行路面拟合处理处理,得到拟合处理后的子体素空间,并将各个拟合处理后的子体素空间进行拼接融合,得到所述路面拟合后的三维体素空间。
26、本公开实施例提供了一种点云数据标注装置,包括:
27、语义分割模块,用于通过雷达装置获取原始点云数据,并对所述原始点云数据进行语义分割,得到针对所述原始点云数据的语义分割结果;
28、空间构建模块,用于构建与所述原始点云数据对应的三维体素空间,并将所述三维体素空间按照预设栅格尺寸划分成多个体素栅格;
29、信息确定模块,用于基于所述原始点云数据的语义分割结果,确定所述三维体素空间中每个体素栅格的语义类别,并确定所述每个体素栅格的其他标注信息,所述其他标注信息包括所述每个体素栅格的位置信息以及可见性;
30、点云标注模块,用于针对所述每个体素栅格,基于所述语义类别以及所述其他标注信息生成标注结果,并基于所述三维体素空间中的各个体素栅格的标注结果,生成与所述原始点云数据对应的标注点云。
31、在一种可能的实施方式中,所述语义分割模块具体用于:
32、通过所述雷达装置获取所述原始点云数据,并通过图像采集装置获取第一图像数据,其中,所述原始点云数据与所述第一图像数据对应于同一场景;
33、对所述第一图像数据进行图像分割处理,得到图像分割处理后的第二图像数据,并基于所述第二图像数据的图像分割结果,对所述原始点云数据进行语义分割处理,得到针对所述原始点云数据的语义分割结果。
34、在一种可能的实施方式中,所述信息确定模块具体用于:
35、针对所述原始点云中的每个点云点,从所述三维体素空间中确定与所述点云点距离最近的目标体素栅格,并将所述点云点存放于所述目标体素栅格中,以基于所述点云点的语义类别确定所述目标体素栅格的语义类别。
36、在一种可能的实施方式中,所述信息确定模块具体用于:
37、在所述目标体素栅格中仅存在一个点云点的情况下,将所述一个点云点的语义类别作为所述目标体素栅格的语义类别;
38、在所述目标体素栅格中存在多个点云点的情况下,将数量最多的语义类别作为所述目标体素栅格的语义类别。
39、在一种可能的实施方式中,所述体素栅格的尺寸与所述三维体素空间的大小正相关。
40、在一种可能的实施方式中,所述信息确定模块具体用于:
41、以所述雷达装置的载体的位置为基准,确定所述每个体素栅格的位置信息;
42、针对所述每个体素栅格,以所述体素栅格以及雷达装置之间的连线上是否存在障碍物,确定所述体素栅格是否可见。
43、在一种可能的实施方式中,所述信息确定模块具体用于:
44、以所述体素栅格为起点朝着所述雷达装置绘制直线,若中途遇到障碍物,则确定所述体素栅格相对所述雷达装置不可见。
45、在一种可能的实施方式中,所述装置还包括路面拟合模块;
46、所述路面拟合模块用于:在所述三维体素空间中存在语义类别为路面的第一体素栅格的情况下,对所述三维空间内的第一体素栅格进行路面拟合,得到路面拟合后的三维体素空间。
47、在一种可能的实施方式中,所述路面拟合模块具体用于:
48、将所述三维体素空间沿着横向和纵向按照预设尺寸进行切割得到多个子体素空间,各个所述子体素空间的高度与所述三维体素空间的高度相同;
49、针对每个子体素空间,采用预设拟合算法对所述子体素空间内的语义类别为路面的第一体素栅格进行路面拟合处理处理,得到拟合处理后的子体素空间,并将各个拟合处理后的子体素空间进行拼接融合,得到所述路面拟合后的三维体素空间。
50、本公开实施例提供了一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当所述电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述任一可能的实施方式所述的点云数据标注方法。
51、本公开实施例提供了一种车辆,包括控制器,所述控制器包括:
52、存储器,被配置成存储指令;以及
53、处理器,被配置成从所述存储器调用所述指令以及在执行所述指令时能够实现上述任一可能的实施方式中所述的点云数据标注方法。
54、本公开实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述任一可能的实施方式中所述的点云数据标注方法。
55、本公开实施例所提供的点云数据标注方法、装置、电子设备、车辆以及可读存储介质,在得到原始点云数据的语义分割结果后,构建与所述原始点云数据对应的三维体素空间,并将所述三维体素空间按照预设栅格尺寸划分成多个体素栅格,然后基于原始点云数据的语义分割结果,确定三维体素空间中每个体素栅格的语义类别,并确定每个体素栅格的其他标注信息,这样不仅可以提升点云数据的标注效率,还可以提升标注的精度。
56、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!