一种基于双目视觉的悬索桥索夹滑移检测方法与流程
本发明涉及悬索桥检测领域,具体涉及一种基于双目视觉的悬索桥索夹滑移检测方法。
背景技术:
1、索夹作为悬索桥缆索系统的重要结构,将结构恒载和车辆活载等产生的吊索拉力传递至主缆。通过采用给索夹上的螺杆施加预紧力的方式,以抵挡由吊索拉力产生沿主缆径向的分力,从而避免索夹的滑移。若索夹螺杆预紧力过小,将会导致索夹出现滑移,引起临近吊索索力的重分配,进而改变主梁线形。该过程具有发散效应,结果不可逆,恢复极其困难。同时,索夹滑移会导致索夹环缝(特别是上端环缝)的防护破损,使得雨水进入主缆内部,引起主缆钢丝的锈蚀,严重影响结构耐久性。
2、传统检测方法常由人工完成,采用卡尺、塞尺等手段来检测索夹滑移量,通过设定扭矩扳手测定和拧紧螺栓。当前也有用无人机拍摄索夹和滑移位置,然后用autocad放大,选定参照后标定滑移量,再测出索夹长度的比例并推算出滑移量。还有采用位移计和温度计的方式,通过位移计测量当前索夹的滑移量,并结合温度计对滑移量进行修正,消除温度对位移的测量影响。可操作性高,应用较广泛,且成本低廉,但精度低、主观性强,不能准确检测得到索夹的滑动距离。
技术实现思路
1、针对现有技术的上述不足,本发明提供了一种能够精确测量得到索夹滑动距离的基于双目视觉的悬索桥索夹滑移检测方法。
2、为达到上述发明目的,本发明所采用的技术方案为:
3、提供一种基于双目视觉的悬索桥索夹滑移检测方法,其包括如下步骤:
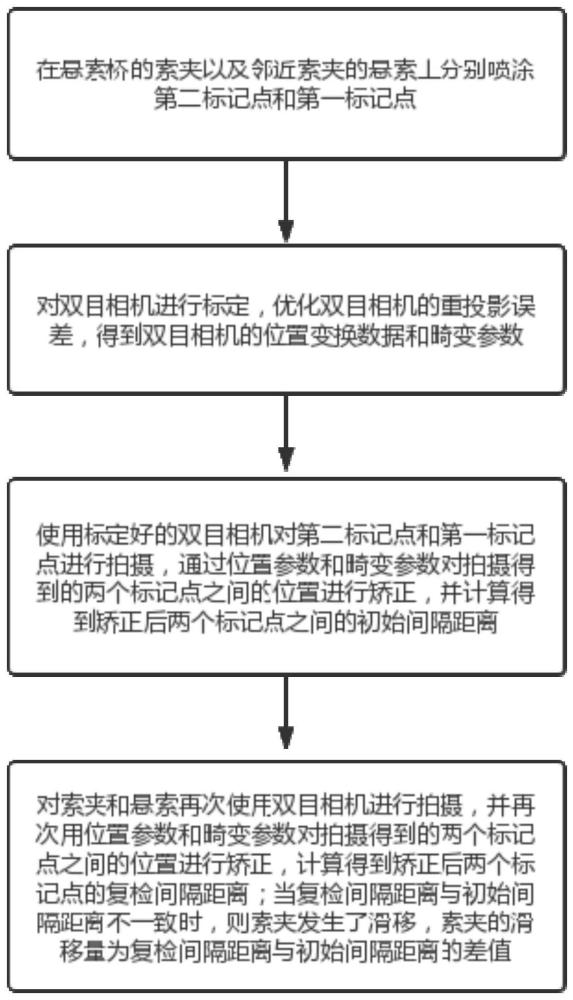
4、s1:在悬索桥的索夹以及邻近索夹的悬索上分别喷涂第二标记点和第一标记点;
5、s2:对双目相机进行标定,优化双目相机的重投影误差,得到双目相机的位置变换数据和畸变参数;
6、s3:使用标定好的双目相机对第二标记点和第一标记点进行拍摄,通过位置参数和畸变参数对拍摄得到的两个标记点之间的位置进行矫正,并计算得到矫正后两个标记点之间的初始间隔距离;
7、s4:对索夹和悬索再次使用双目相机进行拍摄,并再次用位置参数和畸变参数对拍摄得到的两个标记点之间的位置进行矫正,计算得到矫正后两个标记点的复检间隔距离;当复检间隔距离与初始间隔距离不一致时,则索夹发生了滑移,索夹的滑移量为复检间隔距离与初始间隔距离的差值。
8、进一步的,双目相机的位置变换数据的获取具体步骤包括如下:
9、a1:分别对双目相机的左单目相机和右单目相机进行标定,分别使用左单目相机和右单目相机对圆形标定板进行拍摄;
10、a2:根据拍摄的图像构建得到左单目相机的左相机坐标系与世界坐标系的左相机转换关系,右单目相机的右相机坐标系与世界坐标系的右相机转换关系;
11、a3:根据左相机转换关系计算得到左单目相机的位置变换数据其中,rl为左单目相机旋转矩阵;tl为左单目相机平移向量;根据右相机转换关系计算得到右单目相机的位置变换数据其中,rr为右单目相机旋转矩阵;tr为右单目相机平移向量。
12、进一步的,双目相机的畸变参数的获取具体步骤包括如下:
13、b1:使用右单目相机拍摄圆形标定板得到n张右畸变标定图;
14、b2:计算得到右单目相机的重投影误差:
15、
16、其中,mr为第i幅右畸变标定图中检测到的圆心点的数量;为第i幅右畸变标定图中第j个圆形点的实际像素坐标;为坐标系转换后的圆形点的像素坐标;kr为右单目相机的内部参数矩阵;为第i幅右畸变标定图中世界坐标系到右相机坐标系的旋转矩阵;为第i幅右畸变标定图中世界坐标系到右相机坐标系的平移向量;(k1r,k2r,p1r,p2r)为右单目相机的畸变参数;
17、b3:使用左单目相机拍摄圆形标定板得到n张左畸变标定图;
18、b4:计算得到左单目相机的重投影误差:
19、
20、
21、其中,ml为第i幅左畸变标定图中检测到的圆心点的数量;为第i幅左畸变标定图中第j个圆形点的实际像素坐标;为坐标系转换后的圆形点的像素坐标;kl为左单目相机的内部参数矩阵;为第i幅左畸变标定图中世界坐标系到左相机坐标系的旋转矩阵;为第i幅左畸变标定图中世界坐标系到左相机坐标系的平移向量;(k1l,k2l,p1l,p2l)为左单目相机的畸变参数;tr2l为右相机坐标系到左相机坐标系的位置变换关系;tl为世界坐标系到左相机坐标系的位置变换数据;tr为世界坐标系到右相机坐标系的位置变换数据;
22、b5:通过对右单目相机的重投影误差和左单目相机的重投影误差求和并最小化,优化得到左单目相机的畸变参数和右单目相机的畸变参数。
23、进一步的,步骤s3包括如下具体步骤:
24、c1:使用标定好的双目相机拍摄得到包含有第一标记点和第二标记点的标记点图像;
25、c2:对标记点图像进行预处理的到预处理图;
26、c3:使用最大类间方差法计算得到最优分割阈值;
27、c4:使用最优分割阈值将预处理图分割得到二值图;
28、c5:对二值图进行形态学处理后,使用边缘检测提取得到轮廓信息;
29、c6:对轮廓信息进行椭圆拟合得到第一标记点和第二标记点的中心坐标,从而计算得到第一标记点和第二标记点的距离。
30、进一步的,预处理包括依次进行中值滤波和gamma校正。
31、进一步的,步骤c5包括如下具体步骤:
32、c51:使用边缘检测算子核对形态学处理后的二值图进行扫描,得到边缘图像;
33、c52:对边缘图像进行连通域分析,得到图像中各个物体的轮廓;
34、c53:对轮廓进行筛选,得到第一标记点和第二标记点的轮廓。
35、进一步的,步骤c52包括如下具体步骤:
36、c521:遍历边缘图像,若当前位置像素值为0,则赋予该像素点标签值为0;若当前位置像素值不为0,且该像素点四周的八领域的像素值均为0,则赋予该像素点标签label,并令label=label+1;若当前像素值不为零,且该像素点四周的八领域存在具有标签label的像素点,则将八领域内最小的标签值赋予该像素点;得到标签图像;
37、c522:遍历标签图像,将标签图像中具有标签label的像素点替换为连通区域,得到各个物体的轮廓。
38、进一步的,步骤c53包括如下具体步骤:
39、c531:计算每个物体的轮廓面积ai,剔除不属于筛选范围[amin,amax]的轮廓;
40、c532:构建每个保留的轮廓的最小外接矩形,构建时令最小外接矩形的长大于宽,计算得到每个轮廓最小外接矩形的长宽比ri;剔除不属于筛选范围[rmin,rmax]的轮廓;
41、c533:计算每个保留的轮廓的圆形度ci;剔除不属于筛选范围[cmin,cmax]的轮廓;完成对轮廓的筛选。
42、进一步的,步骤c54包括如下具体步骤:
43、c541:设立轮廓的椭圆方程为:
44、ax2+bxy+cy2+dx+ey+f=0;
45、其中,a,b,c,d,e,f为椭圆方程的系数常量;(x,y)为椭圆上点的坐标;
46、c542:定义轮廓上每个点为:
47、f(α,xi)=αxi=axi2+bxiyi+cyi2+dxi+eyi+f;
48、其中,向量向量α=(a,b,c,d,e,f);
49、c543:根据最小二乘法得到单个轮廓上所有轮廓点的椭圆拟合距离误差f(n);
50、
51、其中,i为单个轮廓上的第i个轮廓点;n为单个轮廓的轮廓点数量;
52、c544:根据极值方程计算得到最佳拟合椭圆方程的系数a,b,c,d,e,f,极值方程为:
53、
54、c545:根据拟合椭圆方程的系数a,b,c,d,e,f计算得到椭圆的中心点(xc,yc):
55、
56、进一步的,步骤s4对初始间隔距离的计算包括如下步骤:
57、s41:设定第一标记点在左单目相机拍摄的图像中坐标为第一标记点在右单目相机拍摄的图像中坐标为第二标记点在右单目相机拍摄的图像中坐标为第二标记点在右单目相机拍摄的图像中坐标为
58、s42:根据第一标记点和第二标记点在左单目相机拍摄的图像和右单目相机拍摄的图像的坐标计算得到第一标记点在相机坐标系下的三维空间点坐标(x1,y1,z1)和第二标记点在相机坐标系下的三维空间点坐标(x2,y2,z2):
59、
60、其中,为第一标记点在左右单目相机中的视差;为第一标记点在左右单目相机中的视差;b为两个相机的基线距离;fx,fy为左单目相机的缩放因子;(u0,v0)为左单目相机的图像像素中心坐标;
61、s43:计算得到第一标记点和第二标记点的初始空间距离dinit:
62、
63、本发明的有益效果为:
64、本发明通过采用双目视觉的方式对悬索桥的索夹滑移量进行检测,首先在需要测量的位置喷涂一对标记点,然后利用双目相机拍摄一组包含标记点的图像,后续测量与初始值对比即可获得当前悬索桥索夹的滑移量。本发明方法采用双目视觉的方式,通过图像处理的方式,自动计算出索夹的滑移量,测量误差小、精度高;在测量精度、效率上远高于传统的检测方法。
- 还没有人留言评论。精彩留言会获得点赞!