一种基于傅里叶变换的指纹识别方法及系统
本发明涉及图像处理领域,尤其涉及一种基于傅里叶变换的指纹识别方法及系统。
背景技术:
1、随着信息和数据的爆炸式增长,信息安全成为我们日常生活中重要组成部分。在信息解密领域,生物识别技术是一项重要的手段,通过比对人们特有的生物特征来实现身份识别。常见的生物识别技术包括指纹识别、面部识别、虹膜识别等,其中指纹识别和面部识别是最常见的识别技术。然而由于面部识别在面部信息采集方面存在安全性问题而备受争议。因此,指纹识别技术依然是市场的主流识别技术。传统的指纹识别技术包括光学法、电容法、超声波法等,其中光学方法因其响应速度快而被广泛的应用在成像、传感、存储等领域。光学指纹识别技术主要步骤包括指纹采集、采集的指纹图样的预处理(如灰度处理、过滤增强等)、对预处理后的指纹进行特征点提取、比对提取的特征点实现指纹识别。然而现有技术进行指纹识别都需对采集的指纹数据进行预处理,降低了识别的效率,由此,亟需一种不需要对指纹进行预处理步骤,通过比对指纹的衍射场信息来实现简单且识别速度快的指纹识别方法。
技术实现思路
1、为了解决背景技术中的问题,本发明提供了一种基于傅里叶变换的指纹识别方法及系统,所述方法基于指纹纹路的特殊结构,利用傅里叶变换得到指纹图样的衍射场信息,并通过比对衍射场信息实现指纹的识别。
2、第一方面,本发明提供了一种基于傅里叶变换的指纹识别方法,包括:
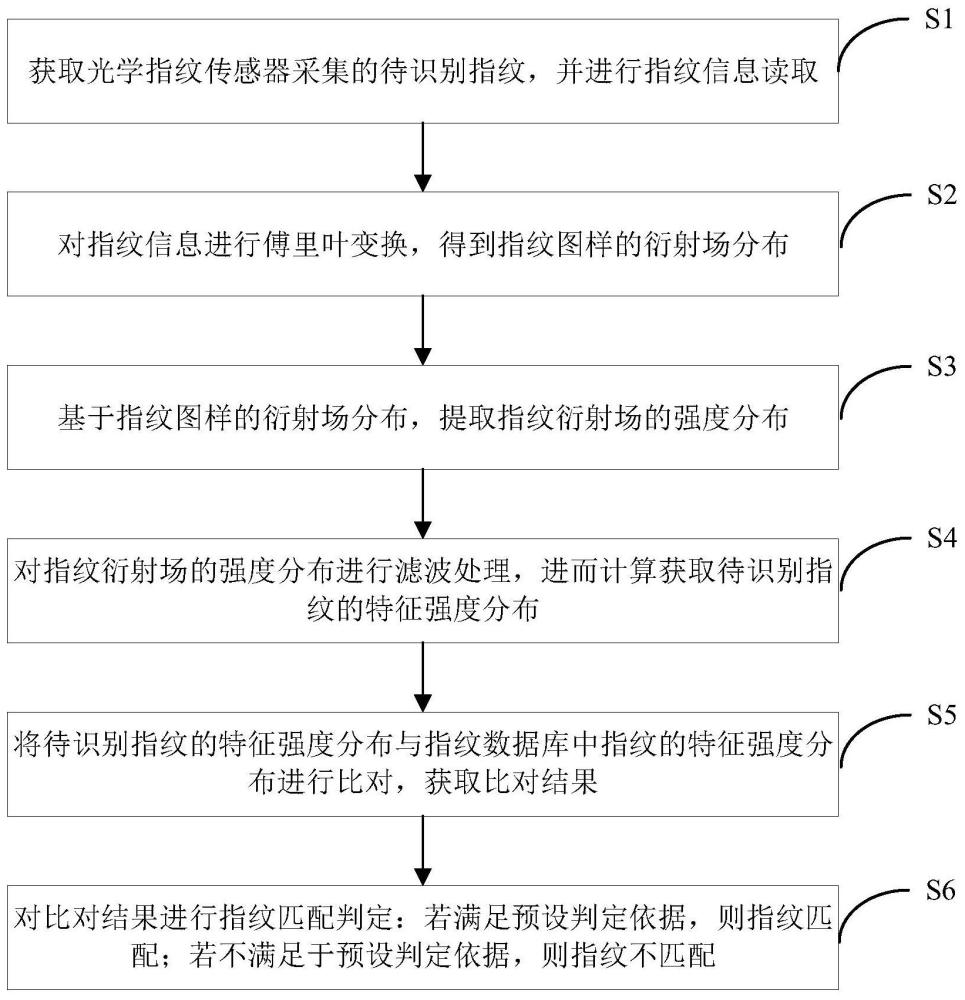
3、s1:获取光学指纹传感器采集的待识别指纹,并进行指纹信息读取;
4、s2:对指纹信息进行傅里叶变换,得到指纹的衍射场分布;
5、s3:基于指纹图样的衍射场分布,提取指纹衍射场的强度分布;
6、s4:对指纹衍射场的强度分布进行滤波处理,得到指纹的特征强度分布;
7、s5:将指纹的特征强度分布与指纹数据库中的特征强度分布进行比对,获取比对结果;
8、s6:对比对结果进行指纹匹配判定:若满足预设判定依据,则指纹匹配;若不满足于预设判定依据,则指纹不匹配。
9、当光束通过光栅时会发生衍射现象,通过利用光束经过指纹图样时,不同的指纹图样对应的对应产生的衍射场分布不同。所述方法获取光学指纹传感器采集的指纹进行指纹信息读取;对采集的指纹进行傅里叶变化得到指纹图样的衍射场信息;进而提取指纹衍射场的强度分布,其中的能量主要集中在中心区域;通过滤波处理,得到指纹的特征强度分布;最后,通过将待匹配的指纹特征强度分布与指纹数据库里的特征强度分布进行比对,如果符合判据,则判定为两个指纹匹配,即指纹来自同一手指;如果不符合判据,则判定为两个指纹不匹配,即指纹来自不同手指。与其他的指纹识别方法相比,所述方法简单且识别速度快,尤其是不需要对指纹进行预处理步骤,有广泛应用于信息安全、智能设备、身份认证等领域的潜力。
10、进一步地,s2中对指纹信息进行傅里叶变换具体为:
11、
12、其中,p(x,y)表示读取的指纹图样;(x,y)表示指纹图样的坐标;f(u,v)表示指纹图样傅里叶变换后的频域分布,即指纹衍射场分布;(u,v)表示指纹频域的坐标;i为虚数单位;m为坐标中的x方向上的总采样点;n为坐标中的y方向上的总采样点。
13、进一步地,s3中提取指纹衍射场的强度分布具体过程为:
14、i(u,v)=|f(u,v)|2
15、其中,(u,v)表示指纹频域的坐标;i(u,v)为指纹的强度分布,f(u,v)表示指纹的衍射场分布。
16、进一步地,s4中对指纹衍射场的强度分布进行滤波处理的具体过程为:
17、
18、其中,f(u,v)为滤波函数;(u,v)表示指纹频域的坐标;w表示坐标中u方向的总采样点;h表示坐标中v方向的总采样点;a表示中心区域的宽度;b表示中心区域的高度。利用滤波函数对指纹强度分布i(u,v)进行处理,滤除中心区域的强度分布,得到指纹的特征强度分布。
19、进一步地,s4中获取指纹的特征强度分布的计算过程为:
20、ic(u,v)=i(u,v)·f(u,v)
21、其中,ic(u,v)为指纹的特征强度分布;i(u,v)为指纹的强度分布;f(u,v)为滤波函数。
22、进一步地,s5中比对结果的获取是基于皮尔逊相关系数和结构相似性,计算待识别指纹的特征强度分布与指纹数据库中的指纹特征强度分布的相似度,计相似度的计算公式为:
23、s=ω1ρ+ω2γ
24、其中,ρ表示皮尔逊相关系数;γ表示结构相似性;ω1和ω2均为权重系数。ω1和ω2分别是用来调控ρ和γ对相似度s的影响权重。在评估两个特征强度分布时,s越接近1,则两个特征强度的相似度越高;越接近0,则两个特征强度的相似度越低。其中皮尔逊相关系数的计算公式为:
25、
26、其中,i1表示待识别指纹的特征强度分布;i2表示指纹数据库中的指纹特征强度分布;表示i1的均值;表示i2的均值;表示i1的标准差、表示i2的标准差。结构相似性的计算公式为:
27、
28、其中,i1待识别指纹的特征强度分布;i2表示指纹数据库中的指纹特征强度分布;表示i1(u,v)的均值;表示i2(u,v)的均值;表示i1(u,v)和i2(u,v)的协方差;为i1的方差;为i2的方差;c1、c2均为常数,避免分母为0的情况。
29、更进一步地,待识别指纹的特征强度分布与指纹数据库中的指纹特征强度分布的相似度的获取方法还包括欧几里得距离、曼哈顿距离、余弦相似度。
30、进一步地,s6的具体过程为:
31、s61:将比对结果进行量化处理,得到待识别指纹的特征强度分布与指纹数据库中的指纹特征强度分布的匹配度;
32、s62:将匹配度与预设阈值进行比较:若匹配度c≥0,则匹配成功;若匹配度c<-0.5,则匹配失败;若匹配度在[-0.5,0)的容差区间,则将待比对指纹进行重新采集和匹配。
33、更进一步地,s61中量化处理的具体过程为:
34、c=tanh[k(s-sth)]
35、其中,c表示两个指纹特征强度分布的匹配度;tanh()表示正切函数;s表示两个指纹特征强度分布的相似度;sth表示两个指纹特征强度分布的预设相似度阈值;k为常数,用来调控曲线在sth附近的陡峭度。预设相似度阈值是作为计算的重要参数,是通过大量的匹配结果进行设置的。
36、第二方面,本发明提供了一种基于傅里叶变换的指纹识别系统,包括:
37、数据采集模块:用于获取光学指纹传感器采集的待识别指纹,并进行指纹信息读取;
38、数据处理模块:用于对指纹信息进行傅里叶变换,得到指纹的衍射场分布;用于基于指纹图样的衍射场分布,提取指纹衍射场的强度分布;用于对指纹衍射场的强度分布进行滤波处理,进而计算获取待识别指纹的特征强度分布;用于将待识别指纹的特征强度分布与指纹数据库中指纹的特征强度分布进行比对,获取比对结果;
39、结果获取模块:用于对比对结果进行指纹匹配判定:若满足预设判定依据,则指纹匹配;若不满足于预设判定依据,则指纹不匹配。
40、有益效果
41、本发明提出了一种基于傅里叶变换的指纹识别方法,与其他的指纹识别方法相比,具有更高的安全性、更快的识别速度和更低的成本。光学指纹的纹路类似为不规则的光栅结构。当光束通过光栅时会发生衍射现象,通过利用光束经过指纹图样时,不同的指纹图样对应的对应产生的衍射场分布不同。因此,基于指纹纹路的特殊结构,利用傅里叶变换得到指纹图样的衍射场信息,并通过比对衍射场信息实现指纹的识别。该方法简单且识别速度快,尤其是不需要对指纹进行预处理步骤,有广泛应用于信息安全、智能设备、身份认证等领域的潜力。
- 还没有人留言评论。精彩留言会获得点赞!