隧道表观病害的三维检测与诊断模拟验证方法
本技术涉及隧道检测,尤其涉及一种隧道表观病害的三维检测与诊断模拟验证方法、平台及存储介质。
背景技术:
1、隧道作为重要的交通基础设施,承担着大量车辆和乘客的运输任务。然而,隧道内部可能存在多种表观病害,如变形、错台、掉块、裂纹等。这些表观病害如果不及时检测和识别,可能会导致严重的不利后果,包括事故发生、交通中断、维护成本增加以及隧道使用寿命缩短。
2、因此,隧道表观病害诊断技术非常重要。为了改进隧道表观病害诊断相关算法模型,目前多采用基于仿真技术的非实体验证方法,或者基于实际隧道环境的实车验证方法。但是,非实体验证方法不是在实际物理环境中进行的验证,受到模型假设限制且无法确保数据准确性;实车验证方法通常需要投入高昂的人力物力成本,无法模拟所有可能的隧道条件和病害类型,且难以重复实施以获取大量测试数据。
3、综上,隧道表观病害诊断相关算法模型的非实体验证方法、实车验证方法由于成本、时间、设备、数据、人力资源等方面的限制,导致难以实施或限制其有效性和效率,因此亟需一项新的模拟验证方法,避免非实体验证方法、实车验证方法的上述限制,进而提升隧道表观病害诊断准确性。
技术实现思路
1、本技术的主要目的在于提供一种隧道表观病害的三维检测与诊断模拟验证方法、平台及存储介质,旨在解决现有隧道表观病害检测诊断相关算法模型的非实体验证方法、实车验证方法难以实施或限制其有效性、效率的问题。
2、为实现上述目的,本技术提供一种隧道表观病害的三维检测与诊断模拟验证方法,所述方法应用于模拟试验平台,所述模拟试验平台包括检测小车和隧道模型,所述检测小车设有激光模块和相机模块,所述方法包括:
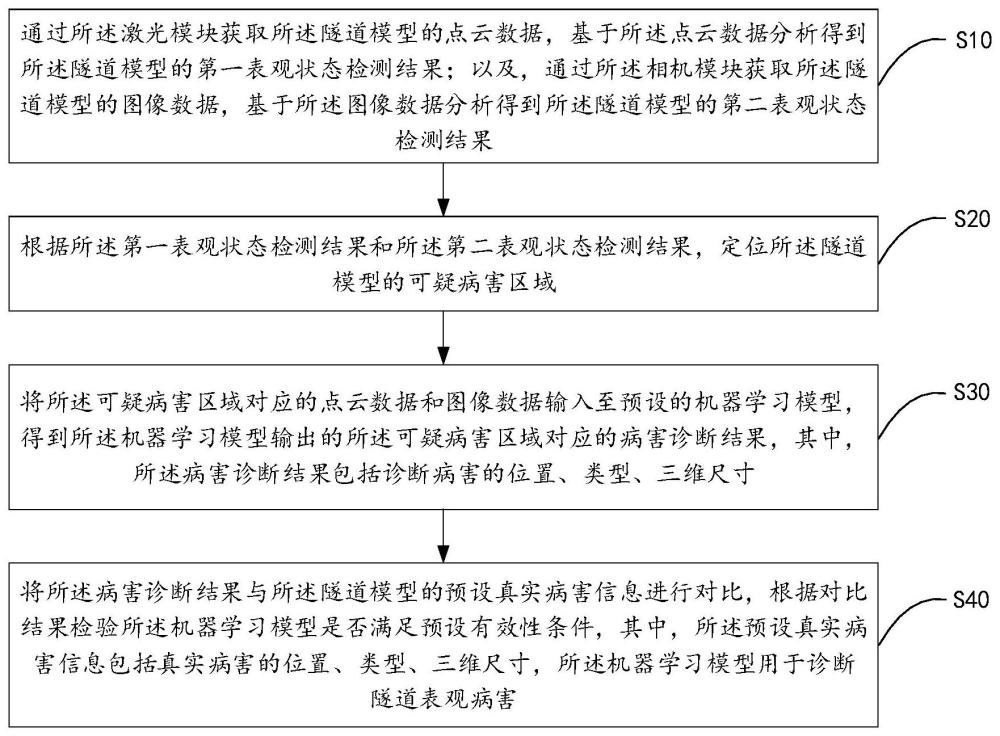
3、通过所述激光模块获取所述隧道模型的点云数据,基于所述点云数据分析得到所述隧道模型的第一表观状态检测结果;以及,通过所述相机模块获取所述隧道模型的图像数据,基于所述图像数据分析得到所述隧道模型的第二表观状态检测结果;
4、根据所述第一表观状态检测结果和所述第二表观状态检测结果,定位所述隧道模型的可疑病害区域;
5、将所述可疑病害区域对应的点云数据和图像数据输入至预设的机器学习模型,得到所述机器学习模型输出的所述可疑病害区域对应的病害诊断结果,其中,所述病害诊断结果包括诊断病害的位置、类型、三维尺寸;
6、将所述病害诊断结果与所述隧道模型的预设真实病害信息进行对比,根据对比结果检验所述机器学习模型是否满足预设有效性条件,其中,所述预设真实病害信息包括真实病害的位置、类型、三维尺寸,所述机器学习模型用于诊断隧道表观病害。
7、可选地,所述检测小车设有计算机,所述计算机设有数据分析模块,所述基于所述点云数据分析得到所述隧道模型的第一表观状态检测结果的步骤包括:
8、通过所述数据分析模块,基于所述点云数据进行面域灰度差异分析和立体深度差异分析得到所述隧道模型的第一表观状态检测结果;
9、所述基于所述图像数据分析得到所述隧道模型的第二表观状态检测结果的步骤包括:
10、通过所述数据分析模块,基于所述图像数据进行面域灰度差异分析和面域谱值差异分析得到所述隧道模型的第二表观状态检测结果。
11、可选地,所述激光模块设有编码器和惯性传感器,所述方法还包括:
12、通过所述编码器在移动的状态下采集里程增量信息和速度信息;以及,通过所述惯性传感器在移动的状态下采集速度增量信息和角速度增量信息;
13、所述通过所述数据分析模块,基于所述点云数据进行面域灰度差异分析和立体深度差异分析得到所述隧道模型的第一表观状态检测结果的步骤包括:
14、通过所述数据分析模块,基于所述点云数据、所述里程增量信息、所述速度信息、所述速度增量信息、所述角速度增量信息进行数据融合,得到所述隧道模型的三维点云模型;
15、对所述三维点云模型进行面域灰度差异分析和立体深度差异分析得到所述隧道模型的第一表观状态检测结果。
16、可选地,所述根据所述第一表观状态检测结果和所述第二表观状态检测结果,定位所述隧道模型的可疑病害区域的步骤包括:
17、通过所述数据分析模块,将所述第一表观状态检测结果和所述第二表观状态检测结果进行交叉验证,得到交叉验证结果;
18、通过所述数据分析模块,根据所述交叉验证结果定位所述隧道模型的可疑病害区域。
19、可选地,所述计算机设有中控系统,所述激光模块设有激光扫描仪,所述通过所述激光模块获取所述隧道模型的点云数据的步骤包括:
20、通过所述中控系统向所述激光模块发送点云采集指令,控制所述激光模块的激光扫描仪获取所述隧道模型的点云数据,并将所述隧道模型的点云数据传输至所述数据分析模块;
21、所述通过所述相机模块获取所述隧道模型的图像数据的步骤包括:
22、通过所述中控系统向所述相机模块发送图像采集指令,控制所述相机模块获取所述隧道模型的图像数据,并将所述隧道模型的图像数据传输至所述数据分析模块。
23、可选地,所述检测小车设有驱动模块,所述方法还包括:
24、响应于输入的移动速度参数与移动方向参数,通过所述中控系统生成并向所述驱动模块发送驱动指令,以使所述驱动模块基于所述驱动指令移动所述检测小车。
25、可选地,所述检测小车设有姿态调节模块,所述姿态调节模块和所述激光模块传动连接,所述方法还包括:
26、响应于输入的姿态调节参数,通过所述中控系统生成并向所述姿态调节模块发送姿态调节指令,以使所述姿态调节模块基于姿态调节指令调节所述激光模块的姿态。
27、可选地,所述将所述可疑病害区域对应的点云数据和图像数据输入至预设的机器学习模型,得到所述机器学习模型输出的所述可疑病害区域对应的病害诊断结果的步骤包括:
28、从所述可疑病害区域对应的点云数据和图像数据之中提取得到所述可疑病害区域的特征信息;
29、将所述可疑病害区域的特征信息输入至所述机器学习模型,得到所述机器学习模型输出的所述可疑病害区域对应的病害诊断结果。
30、本技术实施例还提出一种模拟试验平台,所述模拟试验平台执行实现如上所述的隧道表观病害的三维检测与诊断模拟验证方法的步骤。
31、本技术实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有模拟隧道病害诊断验证程序,所述模拟隧道病害诊断验证程序被处理器执行时实现如上所述的隧道表观病害的三维检测与诊断模拟验证方法的步骤。
32、本技术实施例提出的隧道表观病害的三维检测与诊断模拟验证方法、平台及存储介质,主要通过所述激光模块获取所述隧道模型的点云数据,基于所述点云数据分析得到所述隧道模型的第一表观状态检测结果;以及,通过所述相机模块获取所述隧道模型的图像数据,基于所述图像数据分析得到所述隧道模型的第二表观状态检测结果;根据所述第一表观状态检测结果和所述第二表观状态检测结果,定位所述隧道模型的可疑病害区域;将所述可疑病害区域对应的点云数据和图像数据输入至预设的机器学习模型,得到所述机器学习模型输出的所述可疑病害区域对应的病害诊断结果,其中,所述病害诊断结果包括诊断病害的位置、类型、三维尺寸;将所述病害诊断结果与所述隧道模型的预设真实病害信息进行对比,根据对比结果检验所述机器学习模型的是否满足预设有效性条件,其中,所述预设真实病害信息包括真实病害的位置、类型、三维尺寸,所述机器学习模型用于诊断隧道表观病害。基于本技术方案,通过模拟试验平台实现对隧道模型的表观状态进行全面检测,在模拟环境中综合利用点云数据和图像数据,验证用于机器学习模型用于诊断隧道表观病害的机器学习模型的准确性,避免了实车验证和非实体验证的限制,有效提高对机器学习模型的验证效果和验证效率,促进机器学习模型的性能优化,提高诊断准确率。
- 还没有人留言评论。精彩留言会获得点赞!