一种检验质量的磁加速度噪声的建模方法、设备及介质
本技术涉及引力波探测空间惯性传感器的噪声分析领域,尤其涉及一种检验质量的磁加速度噪声的建模方法、设备及介质。
背景技术:
1、超高灵敏度惯性传感器是空间引力波探测中的关键设备之一,它可以检测卫星与检验质量之间的位置信息,并通过无拖曳控制系统控制微推进器调整卫星姿态,实现卫星随检验质量沿测地线运动。同时,检验质量作为激光干涉测距系统的反射镜,要求在1mhz-1hz频段其测量噪声达到10-15ms-2hz-1/2量级的超高精度。
2、由于残余气体分子对检验质量的撞击、宇宙射线中高能粒子对检验质量的碰撞、温度变化、空间磁场、电场等因素的影响,对检验质量造成干扰。根据空间引力波探测项目lisa(laser interermeter space antenna)的前置技术试验卫星lisa pathfinder的在轨实验表明,在1~30mhz频带范围内,磁噪声占据总噪声(3×10-14ms-2hz-1/2)的40%,达((1.2×10-14ms-2hz-1/2),是惯性传感器噪声的重要来源,因而分析空间惯性传感器中的检验质量在干扰磁场的作用下产生的扰动力就显得尤为重要。
3、磁性物质在外磁场中的受力;磁场力的产生需要同时具备两个条件:一是物质具有磁矩m;二是磁性物质必须处于具有梯度的磁场环境中,即存在对于惯性传感器的检验质量材料均计划采用金铂合金(au-pt)配比方案。这是考虑到金均是弱磁性材料,且金是抗磁性材料,其磁化率χd<0,铂是顺磁性材料,其磁化率χp>0,理论上若两种材料按照一定的比例配比即可获得磁化率χ=0的合金材料,从而消除物质磁性对于惯性传感器噪声的影响。但是实际情况上,检验质量在加工过程中,切削刀具、研磨器具均含有铁磁性材料,即使加工完毕后对检验质量进行多次超声波清洗,也难以避免铁磁性元素的残留;同时au-pt合金即使存放在高真空环境中,长时间也会发生一定程度的氧化,这就会导致tm不可避免地会有一定的剩余磁化强度,处于磁场和磁场梯度中时会受到干扰力的作用。
4、虽然科学界已知道磁性物体在外磁场的受力由磁矩和外磁场决定,但目前对此的研究大多停留在理论推导方面,未借助仿真来分析磁性物质在外磁场的受力来验证理论的正确性。
技术实现思路
1、本发明的目的在于:为了解决上述背景技术中所提到的问题,提供一种可以通过仿真分析空间惯性传感器中检验质量的磁加速度噪声的建模方法、设备及介质。
2、本技术的上述目的是通过以下技术方案得以实现的:
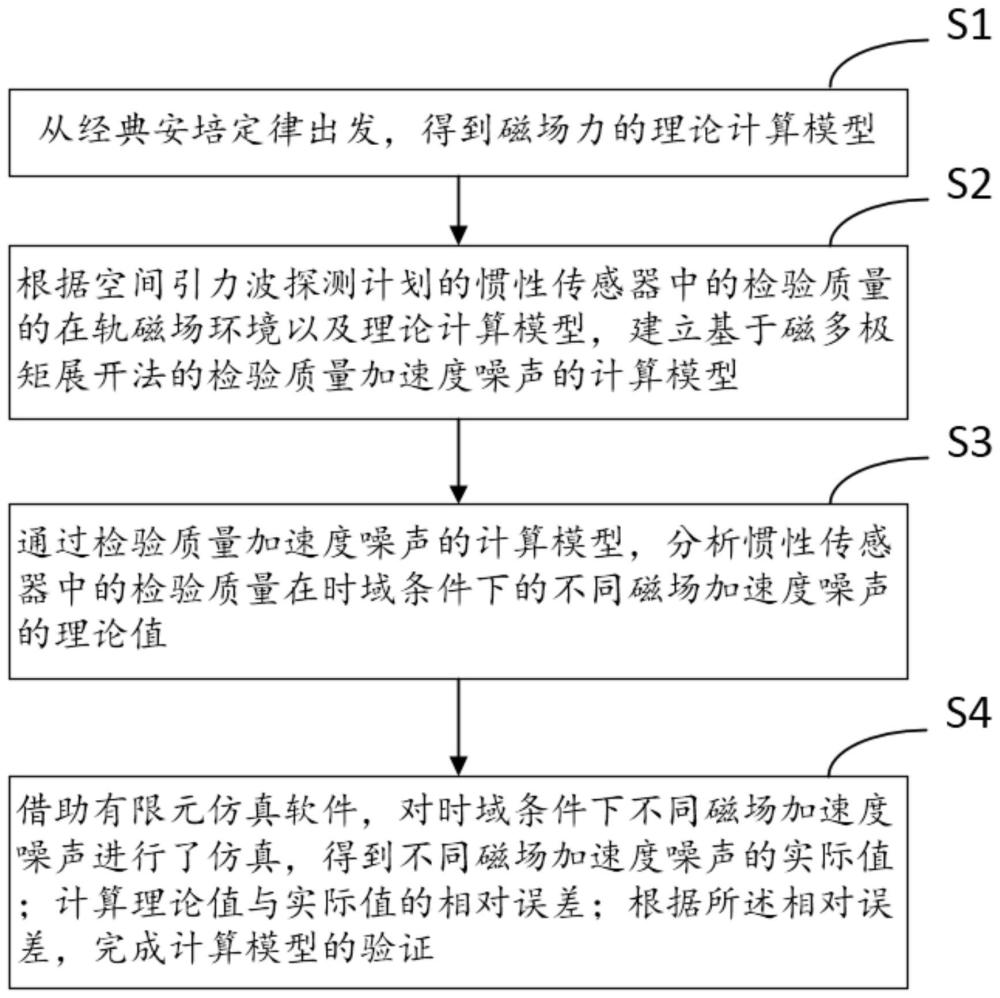
3、s1:从经典安培定律出发,得到磁场力的理论计算模型;
4、s2:根据空间引力波探测计划的惯性传感器中的检验质量的在轨磁场环境以及理论计算模型,建立基于磁多极矩展开法的检验质量加速度噪声的计算模型;
5、s3:通过检验质量加速度噪声的计算模型,分析惯性传感器中的检验质量在时域条件下的不同磁场加速度噪声的理论值,并借助matlab软件绘制不同磁场加速度噪声的耦合曲线图;
6、s4:借助comsol multiphysics有限元仿真软件,对时域条件下不同磁场加速度噪声进行了仿真,得到不同磁场加速度噪声的实际值;计算理论值与实际值的相对误差;根据所述相对误差,完成计算模型的验证。
7、可选的,步骤s1包括:
8、s11:根据经典安培定律,体积v内的电流,受外磁场的作用力f为:
9、f=∫vj(r′)×be(r′)dτ′ (1)
10、式中,be(r′)是物体的外磁场,r′表示源点;j(r′)表示电流密度;
11、s12:假定电流分布在一个小区域,将be(r′)在这个小区域的内部任意一点展开,得
12、
13、其中,表示外磁场一阶展开项;
14、将(2)式带入(1)式有
15、
16、其中,j′为j(r′);be0表示r′=0带入be(r′)中的表达式;表示外磁场一阶展开项;
17、式中j′=j(r′),(2)式中第一项为
18、∫j′×be0dτ′=-be0×[∫jdτ′]=0 (4)
19、第二项中的与积分无关,记作所以有
20、
21、将作用力f写成:
22、
23、s13:即为磁矩m,得到理论计算模型,如下:
24、
25、其中,m表示磁矩;
26、得到磁偶极子在外磁场中的受力公式,如下:
27、
28、可选的,步骤s2包括:
29、s21:将检验质量视为磁偶极子,根据理论计算模型,得到检验质量在外磁场中的受力公式,具体如下:
30、将检验质量视为磁偶极子,由于检验质量磁化率极小,假定在外磁场的作用下,检验质量均匀磁化,剩磁分布均匀,则检验质量在外磁场中的受力公式如下:
31、
32、其中m代表磁化强度,b代表外磁场,v代表检验质量的体积,<…>代表平均;
33、s22:根据空间惯性传感器的检验质量所在的在轨磁场环境,进行理论推导;
34、由于可将检验质量视为均匀磁化体,则检验质量受到外磁场作用力的力密度f可表示为:
35、
36、在直角坐标系中,检验质量的磁化强度m和外磁场b均可表示为三分量形式,如下:
37、m=mxi+myj+mzk(11)
38、b=bxi+byj+bzk(12)
39、其中,i,j,k分别代表直角坐标系中x,y,z方向的单位矢量;mx、my、mz分别表示直角坐标系中x,y,z方向的磁化强度;bx、by、bz分别表示直角坐标系中x,y,z方向的外磁场强度;
40、则力密度f可表示为
41、
42、检验质量的磁化强度m由剩余磁化强度mre和感应磁化强度minn组成,即
43、m=mre+min(14)
44、式中mre表示检验质量的剩余磁化强度,min表示检验质量的感应磁化强度;
45、由磁化理论可知,感应磁化强度,有如下表达:
46、
47、式中χ表示检验质量的磁化率,v0表示真空磁导率;
48、检验质量的磁化强度可进一步表示为:
49、
50、惯性传感器的检验质量所处的磁场环境由行星际磁场和卫星磁场组成,可表示为
51、b=bsc+bip(17)
52、式中bsc代表卫星磁场,bip代表行星际磁场;卫星磁场bsc和行星际磁场bip均由稳定成分和波动成分组成,即
53、
54、其中,卫星磁场稳定项;δbsc表示卫星磁场波动项;表示行星际磁场稳定项;δbip表示行星际磁场波动项;
55、所以有
56、
57、由于航天器的尺度相对于行星际磁场存在空间的尺度可以忽略不计,故在磁场梯度的分析中,忽略行星际磁场的梯度的作用,即磁场梯度均由航天器磁场梯度组成,即
58、
59、假定惯性传感器的敏感方向为x轴方向,则x方向的力密度fx,如下:
60、
61、其中,bxx、bxy、bxz表示直角坐标系中x,y,z方向的外磁场强度关于x的一阶偏导数;
62、s23:给出检验质量的各类磁噪声耦合的表达式,如下:
63、将式(14)~(20)代入(10),则磁场力密度f表示为:
64、
65、则根据磁多极矩展开法,惯性传感器的检验质量在敏感轴方向的加速度噪声的计算模型,如下:
66、
67、式中m1代表检验质量的质量,a表示加速度噪声。
68、可选的,步骤s4包括:
69、s41:在comsol multiphysics有限元仿真软件中构建检验质量的磁场加速度噪声分析模型;
70、s42:借助磁场加速度噪声分析模型,通过设置不同干扰磁场条件,仿真得到检验质量的不同磁场加速度噪声的实际值;
71、s43:以磁场加速度噪声分析模型的结果为基准,计算理论值与实际值的相对误差;根据所述相对误差,完成计算模型的验证。
72、一种电子设备,包括处理器、存储器、用户接口及网络接口,所述存储器用于存储指令,所述用户接口和网络接口用于给其他设备通信,所述处理器用于执行所述存储器中存储的指令,以使所述电子设备执行一种检验质量的磁加速度噪声的建模方法。
73、一种计算机可读存储介质,所述计算机可读存储介质存储有指令,当所述指令被执行时,执行一种检验质量的磁加速度噪声的建模方法。
74、本技术提供的技术方案带来的有益效果是:借助磁多极矩展开法建立了空间惯性传感器检验质量磁加速度噪声的计算模型,进行加速度噪声的建模与分析,之后对时域条件下各类耦合作用产生的磁加速度噪声的最大值进行仿真对比验证,解决了前对磁加速度的研究大多停留在理论推导方面,未借助仿真来分析磁性物质在外磁场的受力来验证理论的正确性的问题。
- 还没有人留言评论。精彩留言会获得点赞!