一种行星滚柱丝杠多滚柱统一静力学分析方法
本发明涉及的是一种机械设计的静力学分析方法,特别是一种高了计算效率的行星滚柱丝杠多滚柱统一静力学分析方法。
背景技术:
1、行星滚柱丝杠多滚柱载荷分配和螺纹副载荷分布是分析行星滚柱丝杠摩擦磨损、传动效率、热特性、疲劳损伤和寿命预测的基础。行星滚柱丝杠多滚柱载荷分配和螺纹副载荷分布不均匀性会加剧行星滚柱丝杠磨损和温升,降低行星滚柱丝杠服役寿命。因此,在设计行星滚柱丝杠的过程中,需要评估行星滚柱丝杠的多滚柱载荷分配和螺纹副载荷分布,从而使得设计的行星滚柱丝杠多滚柱间和螺纹副间更加均载,延长其服役寿命。学者已经分别建立行星滚柱丝杠多滚柱载荷分配模型和螺纹副载荷分布模型,但已建立的模型均较为复杂,且并不能将多滚柱载荷分配和螺纹副载荷分布统一理论分析,这对计算效率和工程应用造成了很多不必要的模范。因此,统一分析多滚柱载荷分配和螺纹副载荷分布,推导多滚柱载荷分配和螺纹副载荷分布统一表达式,对提高计算效率和工程应用具有重要的意义。
技术实现思路
1、本发明针对现有技术的不足,提出一种行星滚柱丝杠多滚柱统一静力学分析方法,建立了多滚柱载荷分配和螺纹副载荷分布统一评估方法,推导了多滚柱载荷分配和螺纹副载荷分布的统一表达式,所推导的表达式可适用于含多误差的多滚柱载荷分配和螺纹副载荷分布计算。
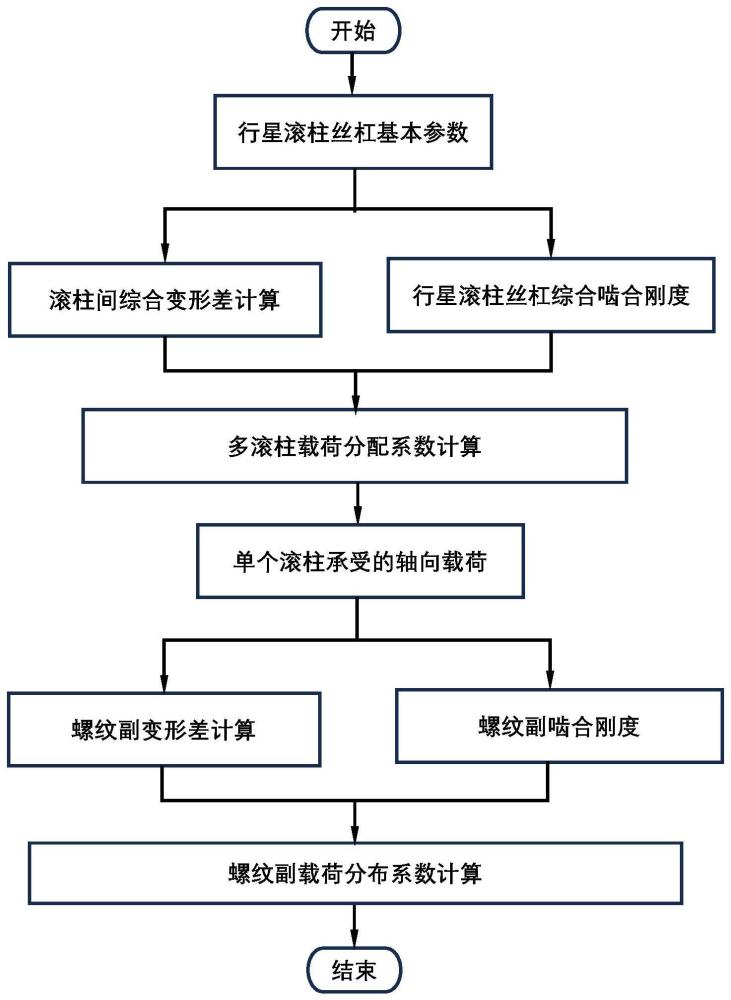
2、本发明是通过以下技术方案来实现的,本发明包括以下步骤:步骤一,获得行星滚柱丝杠基本参数;步骤二,在已知的行星滚柱丝杠的基本参数的基础上,求解滚柱间综合变形差和行星滚柱丝杠综合啮合刚度;步骤三,根据所求解得到的滚柱间综合变形差和行星滚柱丝杠综合啮合刚度,计算多滚柱载荷分配系数;步骤四,基于多滚柱载荷分配系数,确定单个滚柱所承受的轴向载荷;步骤五,根据所确定的单个滚柱所承受的轴向载荷,计算螺纹副变形差和螺纹副啮合刚度;步骤六,根据所计算的螺纹副的变形差和啮合刚度,计算单个滚柱的螺纹副间载荷分布系数;
3、其中,在步骤一中,所述行星滚柱丝杠基本参数包括基本几何参数和基本运行参数,基本几何参数包括:滚柱名义直径、丝杠名义直径、螺母名义直径、螺母外径、丝杠螺纹线数、滚柱螺纹线数、螺母螺纹线数、螺纹牙根高度、螺纹牙根厚度、螺纹牙厚度、滚柱螺纹数、滚柱数、螺纹节距、半螺纹牙侧角、材料泊松比、弹性模量;基本运行参数包括轴向载荷;
4、在步骤二中,所述行星滚柱丝杠综合啮合刚度包括滚柱、丝杠和螺母螺纹牙刚度,滚柱、丝杠和螺母轴段刚度,滚柱丝杠侧和滚柱螺母侧接触刚度;其中,滚柱、丝杠和螺母螺纹牙刚度包括五种螺纹牙变形对应刚度。
5、进一步地,在本发明步骤二中,五种螺纹牙变形对应刚度可表示为
6、
7、式中,kqt_ya1,kqt_ya2,kqt_ya3和kqt_ya4分别表示螺纹牙弯曲刚度,剪切刚度,螺纹牙根倾斜刚度和螺纹牙根剪切刚度,单位均为n/mm;下标q(q=s,r,n)分别表示丝杠、滚柱和螺母;丝杠和滚柱(p=s,r)径向刚度可通过公式中kt_ya5-i计算;螺母径向分刚度可通过公式中kt_ya5-o计算;μ表示材料泊松比;e表示弹性模量,单位为gpa;a和b分别表示螺纹牙根厚度和螺纹牙厚度,单位为mm;c为螺纹牙根高度,单位为mm;α为半螺纹牙侧角,单位为°;d和p分别表示名义直径和节距,单位均为mm。
8、更进一步地,在本发明步骤二中,滚柱、丝杠和螺母螺纹牙刚度可分别表示为:
9、
10、式中,kqt_ya1,kqt_ya2,kqt_ya3和kqt_ya4分别表示螺纹牙弯曲刚度,剪切刚度,螺纹牙根倾斜刚度和螺纹牙根剪切刚度,单位均为n/mm;丝杠和滚柱(p=s,r)径向刚度可通过公式中kt_ya5-i计算;螺母径向分刚度可通过公式中kt_ya5-o计算,单位均为n/mm。
11、更进一步地,在本发明步骤二中滚柱、丝杠和螺母轴段刚度可表示为:
12、
13、式中,下标q(q=s,r,n)分别表示丝杠、滚柱和螺母;e表示滚柱、丝杠和螺母材料的弹性模量,单位为gpa;a为横截面积,单位为mm2;p为螺距,单位为mm。
14、更进一步地,在本发明步骤二中,滚柱丝杠侧和滚柱螺母侧接触刚度可分别表示为:
15、
16、式中,qsr,m和qnr,m分别表示滚柱丝杠侧和滚柱螺母侧螺纹副接触载荷,单位均为n;δsr,m和δnr,m分别表示滚柱丝杠侧和滚柱螺母侧螺纹副接触变形,单位均为mm。
17、更进一步地,在本发明步骤二中,行星滚柱丝杠综合啮合刚度可表示为:
18、
19、式中,i为滚柱编号;m为滚柱螺纹牙编号;nt为滚柱螺纹数;kzi为第i个滚柱对应的综合啮合刚度,单位为n/mm;knb,m,krb,m和ksb,m分别表示螺母、滚柱和丝杠轴段刚度,单位均为n/mm;knt,m,krt,m和kst,m分别表示螺母、滚柱和丝杠螺纹牙刚度,单位均为n/mm;knr,m和ksr,m分别表示滚柱螺母侧和滚柱丝杠侧接触刚度,单位均为n/mm。
20、更进一步地,在本发明步骤二中,滚柱间综合变形差可表示为:
21、δδij=δzi-δzj
22、式中,δδij为第i个滚柱和第j个滚柱间综合变形差,单位为mm;δi为第i个滚柱综合变形量,单位为mm;δj为第j个滚柱综合变形量,单位为mm。
23、更进一步地,在本发明步骤三中,多滚柱载荷分配系数可表示为:
24、
25、在步骤四,所述单个滚柱所承受的轴向载荷可表示为:
26、fai=κi·faz
27、式中,κi为第i个滚柱的载荷分配系数;kzi为第i个滚柱对应的综合啮合刚度,单位为n/mm;faz为轴向载荷,单位为kn;n为滚柱螺纹数;j为滚柱编号。
28、更进一步地,在本发明步骤五中,螺纹副啮合刚度可分别表示为:
29、
30、所述螺纹副的变形差可表示为:
31、
32、式中,ksr,m和knr,m分别为滚柱丝杠侧和滚柱螺母侧第m个螺纹副啮合刚度,单位均为n/mm;esr,lm和enr,lm分别表示滚柱丝杠侧和滚柱螺母侧第l个螺纹副和第m个螺纹副间变形差,单位均为mm。
33、更进一步地,在本发明步骤六中,单个滚柱的螺纹副间载荷分布系数可表示为:
34、
35、式中,ksr,l和knr,l分别表示滚柱丝杠侧和滚柱螺母侧第l个螺纹副载荷分布系数;fai为第i个滚柱所承受的轴向载荷,单位为kn。
36、在本发明中,行星滚柱丝杠是一种将旋转运动转化为直线运动的机械螺纹传动副,包括丝杠、螺母、多个滚柱、内齿圈和保持架;主要承载部件为丝杠、螺母和多个滚柱。滚柱丝杠侧指的是滚柱和丝杠接触侧的螺纹副。滚柱螺母侧指的是滚柱和螺母接触侧的螺纹副。滚柱载荷分配指的是多个滚柱与丝杠、螺母啮合过程中多个滚柱间的载荷分配关系。螺纹副载荷分布指的是单个滚柱在滚柱丝杠侧和滚柱螺母侧螺纹副间载荷分布关系。行星滚柱丝杠结构、多滚柱载荷分配和螺纹副载荷分布见附图2。
37、与现有技术相比较,本发明的有益效果为:本发明大大地降低了多滚柱载荷分配和螺纹副载荷分布的计算复杂性,提高了计算效率,更适于推广至工程应用,可更好地应用于行星滚柱丝杠设计中。
- 还没有人留言评论。精彩留言会获得点赞!