基于机器视觉的欧松板表面瑕疵检测方法与流程
本技术涉及图像处理,具体涉及基于机器视觉的欧松板表面瑕疵检测方法。
背景技术:
1、欧松板,即定向结构刨花板,是以小径材、间伐材、木芯为原料,通过专用设备加工成刨片,经脱油、干燥、施胶、定向铺装、热压成型等工艺制成的一种定向结构板材。欧松板得益于材料稳定性好、稳定性比较强、使用寿命长、绿色环保以及可塑性强等优点得以广泛应用。但是由于欧松板是实木削片压制而成的,光滑度差,且欧松板在施工时,表面容易在坑内留下一个孔,若不在表面进行处理,直接将欧松板暴露在空气中,那么坑洞长久下去容易积聚灰尘;而不同生产批次的欧松板,花纹不同,平整度也会不同,因此对欧松板的表面瑕疵的检测是欧松板质检的关键环节。
2、现阶段常用于图像缺陷检测的算法包括阈值分割、区域生长、基于图的分割算法等,其中,阈值分割只适用于简单背景的分割;区域生长虽然适用于图像中具有明显边界的目标分割,但是对于欧松板表面纹理复杂的区域,容易导致过分生长或断裂;基于图的分割算法能够处理复杂的图像分割问题,适用于纹理复杂、目标形状多样的场景,但是对参数敏感,需要事先设置一些参数,且基于欧式距离的度量方式面对流形数据时,使用欧式距离计算的聚类算法往往会忽略全局一致性,无法有效捕捉数据的内在结构,导致欧松板表面瑕疵缺陷检测结果不理想。
技术实现思路
1、为了解决上述技术问题,本发明提供基于机器视觉的欧松板表面瑕疵检测方法,以解决现有的问题。
2、本发明的基于机器视觉的欧松板表面瑕疵检测方法采用如下技术方案:
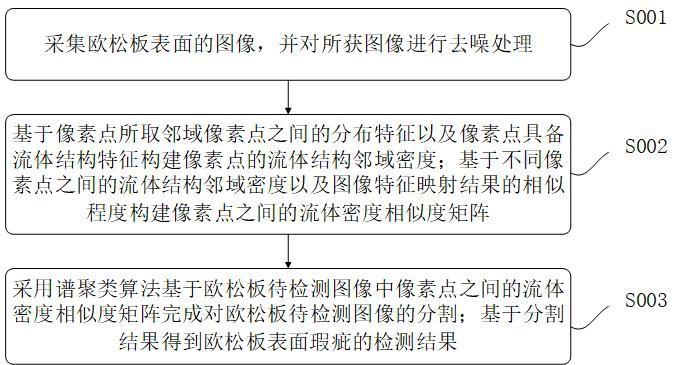
3、本发明一个实施例提供了基于机器视觉的欧松板表面瑕疵检测方法,该方法包括以下步骤:
4、获取欧松板待检测图像;
5、对欧松板待检测图像上的像素点采用dbscan算法进行聚类获取各像素点的簇中心距离序列以及各像素点的类别;根据像素点之间的类别以及簇中心距离序列的差异特征获取像素点之间的近邻变化量序列;根据各像素点的近邻变化量序列结合bg序列分割算法获取谱聚类算法所有像素点的近邻点数量;根据谱聚类算法所有像素点的近邻点数量结合k近邻算法获取各像素点的近邻点;根据欧松板待检测图像各像素点的梯度特征以及灰度特征获取各像素点的高维特征;根据任意两个像素点的所有近邻点的高维特征的相似程度获取像素点之间的高维特征分布相似度;根据任意两个像素点与各自近邻点的高维特征以及欧式距离获取像素点之间的密度系数;根据像素点之间的高维特征分布以及密度系数获取像素点之间的流体邻域密度距离;根据像素点之间的近邻链接概率、密度距离、流体邻域密度距离获取像素点之间的样本连通相似度;所有像素点之间的样本连通相似度组成流体密度相似度矩阵;
6、根据流体密度相似度矩阵结合谱聚类算法对欧松板待检测图像进行分割;根据分割获取的图像块完成欧松板表面瑕疵检测。
7、优选的,所述对欧松板待检测图像上的像素点采用dbscan算法进行聚类获取各像素点的簇中心距离序列以及各像素点的类别,具体步骤包括:
8、预设dbscan算法的距离阈值和样本数量阈值;将欧松板待检测图像的所有像素点作为dbscan算法的输入,结合所述距离阈值和样本数量阈值获取聚类过程中各像素点的类别,其中所述类别包括:核心点、边界点、噪声点,dbscan算法的输出为各聚类簇;对各聚类簇进行标号;获取各聚类簇的中心点;将各像素点与所有聚类簇的中心点之间的欧式距离按照聚类簇标号升序排列组成的序列作为各像素点的簇中心距离序列。
9、优选的,所述根据像素点之间的类别以及簇中心距离序列的差异特征获取像素点之间的近邻变化量序列,具体为:
10、设置核心点、边界点、噪声点的数据权重;
11、对于各像素点;取以各像素点为中心点,以所述距离阈值为半径的圆形区域;分别获取所述圆形区域中各类别点的数量;将像素点各类别所述数据权重与对应所述数量作为各像素点的三分类分布向量的各元素;
12、计算各像素点所述圆形区域中像素点数量与像素点总数量的比值;
13、对于像素点a和像素点c;
14、将像素点a与像素点c的三分类分布向量的余弦相似度保存为第一余弦相似度;将像素点a与像素点c的簇中心距离序列的余弦相似度保存为第二余弦相似度;计算像素点a与像素点c所述比值的差值绝对值;设置调参因子;将所述第一余弦相似度与所述第二余弦相似度的和值保存为第一和值;将所述差值绝对值与所述调参因子的和值保存为第二和值;将所述第一和值与第二和值的比值作为像素点a与像素点c的近邻链接概率;
15、将各像素点与其余所有像素点之间的近邻链接概率按照降序排列所组成的序列保存为各像素点的近邻概率序列;对各像素点所述近邻概率序列进行一阶差分获取各像素点的近邻变化量序列。
16、优选的,所述根据各像素点的近邻变化量序列结合bg序列分割算法获取谱聚类算法所有像素点的近邻点数量,具体为:
17、将各像素点所述近邻变化量作为bg序列分割算法的输入,bg序列分割算法的输出为各像素点近邻变化量序列的第一个突变点;
18、获取各像素点所述第一个突变点在近邻变化序列的次序值;将所有像素点所述次序值与1的和值的均值作为谱聚类算法所有像素点的近邻点数量。
19、优选的,所述根据欧松板待检测图像各像素点的梯度特征以及灰度特征获取各像素点的高维特征,具体为:
20、将欧松板待检测图像分别作为lbp算法、hog算子的输入,分别输出欧松板待检测图像各像素点的lbp值、梯度方向以及梯度角度;采用加权平均法计算欧松板检测图像各像素点的灰度值;
21、结合高斯核函数对各像素点的lbp值、梯度方向以及梯度角度、灰度值采用核技巧技术获取各像素点的高维特征。
22、优选的,所述根据任意两个像素点的所有近邻点的高维特征的相似程度获取像素点之间的高维特征分布相似度,具体为:
23、对于像素点a和像素点c;
24、针对像素点a的近邻点,获取像素点a的各个近邻点与像素点c的各个近邻点之间的高维特征的皮尔逊相关系数;计算所有所述皮尔逊相关系数的和值;将所述和值与谱聚类算法所有像素点的近邻点数量的比值作为像素点a和像素点c之间的高维特征分布相似度。
25、优选的,所述根据任意两个像素点与各自近邻点的高维特征以及欧式距离获取像素点之间的密度系数,具体表达式为:
26、
27、式中,是像素点a、c之间的密度系数,、分别是像素点a、c的高纬特征,、分别是与、与之间的皮尔逊相关系数,是像素点a与其第个近邻点之间的欧式距离,是像素点c与其第g个近邻点之间的欧式距离。
28、优选的,所述根据像素点之间的高维特征分布以及密度系数获取像素点之间的流体邻域密度距离,具体步骤包括:
29、获取像素点之间的欧式距离;将像素点之间所述欧式距离与密度系数的乘积作为第一乘积;将像素点之间密度系数的倒数与高维特征分布相似度的乘积作为第二乘积;计算所述第一乘积与所述第二乘积的和值;将所述和值作为以自然常数为底数的指数函数的指数;将所述指数函数的计算结果作为像素点之间的流体邻域密度距离。
30、优选的,所述根据像素点之间的近邻链接概率、密度距离、流体邻域密度距离获取像素点之间的样本连通相似度,具体包括:
31、将各像素点作为节点,将两个像素点之间的近邻链接概率作为相应两个节点之间边的权重构建有权无向图;
32、将有权无向图作为dijkstra算法的输入,dijkstra算法的输出为两个节点之间的最短路径;
33、对于像素点a和像素点c;
34、统计像素点a与像素点c对应节点之间最短路径上的节点数量m;
35、像素点a、c之间的样本连通相似度,表达式为:
36、
37、式中,是以自然常数为底数的对数函数,是以自然常数为底数的指数函数,a+1是像素点a、c对应节点之间的最短路径上与第1个节点最相邻的节点对应的像素点,是像素点a、像素点a+1之间的流体邻域密度距离,、分别是像素点a、a+1的局部密度,为调参因子。
38、优选的,所述根据分割获取的图像块完成欧松板表面瑕疵检测,具体步骤包括:
39、采用canny边缘检测获取各个图像块的边缘轮廓;获取各个图像块边缘轮廓的傅里叶描述子;
40、对于各图像块;计算各图像块与其余图像块的傅里叶描述子的余弦相似度;计算各图像块所述余弦相似度的和值;
41、将所述和值最小的图像块作为瑕疵区域。
42、本发明至少具有如下有益效果:
43、本发明主要通过聚类结果中像素点周围不同种类像素点的分布特征确定像素点之间的近邻链接概率,基于所有像素点之间的近邻链接概率确定谱聚类算法中构建相似度矩阵时所取近邻点的数量,有益效果在于能够根据整个欧松板表面实际瑕疵的大小和种类确定每个像素点应当与其近邻点之间应当满足的相似度,避免预先设置经验值忽略欧松板待检测图像中瑕疵实际情况的问题。
44、其次,基于像素点以及像素点所取近邻点的高维特征分布特征构建像素点之间的流体邻域密度,流体邻域密度距离同时考虑像素点之间高维特征以及所处区域的密集程度,其有益效果在于通过自适应调节密度系数能够使得密集区域中两个数据点之间的空间距离被挤压,使得流体邻域密度距离对欧松板待检测图像中存在瑕疵时像素点形成的非凸数据集具有更好的图像分割效果。
45、最后,基于流体邻域密度以及像素点对应节点之间的最短路径确定像素点之间的样本连通相似度,避免传统谱聚类算法仅使用欧式距离构建相似度矩阵忽略全局一致性,无法有效捕捉欧松板待检测图像中像素点内在结构的问题,提高欧松板待检测图像的分割精度。
- 还没有人留言评论。精彩留言会获得点赞!