一种基于机器学习的起重机吊钩摆角预测方法与流程
本发明涉及起重机摆角预测,具体涉及一种基于机器学习的起重机吊钩摆角预测方法。
背景技术:
1、船用起重机是海洋工程领域必不可少的设备,其主要用于港口装卸货物、吊装物资等,由于起重机在吊装过程中会受到风载荷的影响产生摇摆现象,影响装卸过程的安全,为了有效减小起重机吊重摇摆带来的危害,现在的起重机大部分带有防摆装置。
2、现有技术通过传感器等方式去测量实时风载荷的相关信息,并将相关数据信息传递给控制单元,控制单元通过读取传输过来的数据分析风速、风向等特性得到摆角的特征,之后把指令传递给液压动力站进行减摇,该方案需要实时分析风载荷特征,其速度较慢,在一些紧急场合不适用。
3、现有技术还有其他检测起重机摆角的报道,比如:发明专利202110703530.2一种起重机吊钩/吊物摆角检测方法和系统,采用图像处理技术,可以得到实时的摆角信息,但操作步骤复杂,需要一个拍摄标志物,且要采集不同绳长及静止状态下的标志物图像并进行图片降噪处理,得到摆角的时间较长;发明专利202211368255.4基于激光雷达门座式起重机偏摆角及速度测量方法及系统,采用激光雷达实时扫描得到点云数据,然后在对数据进行相关处理得到摆角信息,但只能在垂直方向上扫描,所以只能得到偏摆角,无法测量不同方向的摆角信息;论文:海上过驳平台起重机吊重摆角检测与防摆控制研究.许军成.江苏大学专业硕士学位论文.公开了一种激光检测方法来检测摆角,需要两组高速激光扫描仪固定在正方体框架结构安装架内成为吊重摆角检测装置,安装在吊臂顶端,可以实现吊重在三维空间内发生摆动的摆角检测要求,但激光检测的成本较高;熊肖磊等公开了一种用图像传感器结合计算机视觉算法测得摆角(熊肖磊,张瑜,周奇才,等.基于yolov3的桥式起重机摆角检测系统[j].起重运输机械,2021(4):30-33.),基于yolov3目标检测算法识别吊钩,根据图像中吊钩离开平衡位置的位移和图像坐标变换计算出摆动角度,但需要外加标志物才能进行视觉检测,并且需要对图像进行预处理,因为实际的镜头并非理想的透视成像,而是有径向畸变和切向畸变,所以进行坐标变换计算得到的摆角会不准确。
技术实现思路
1、本发明解决现有技术获取起重机吊钩摆角时间长、速度慢、成本高、摆角信息不准确的问题,提供一种基于机器学习的起重机吊钩摆角预测方法。
2、本发明要求保护的技术方案如下:
3、一种基于机器学习的起重机吊钩摆角预测方法,包括如下步骤:
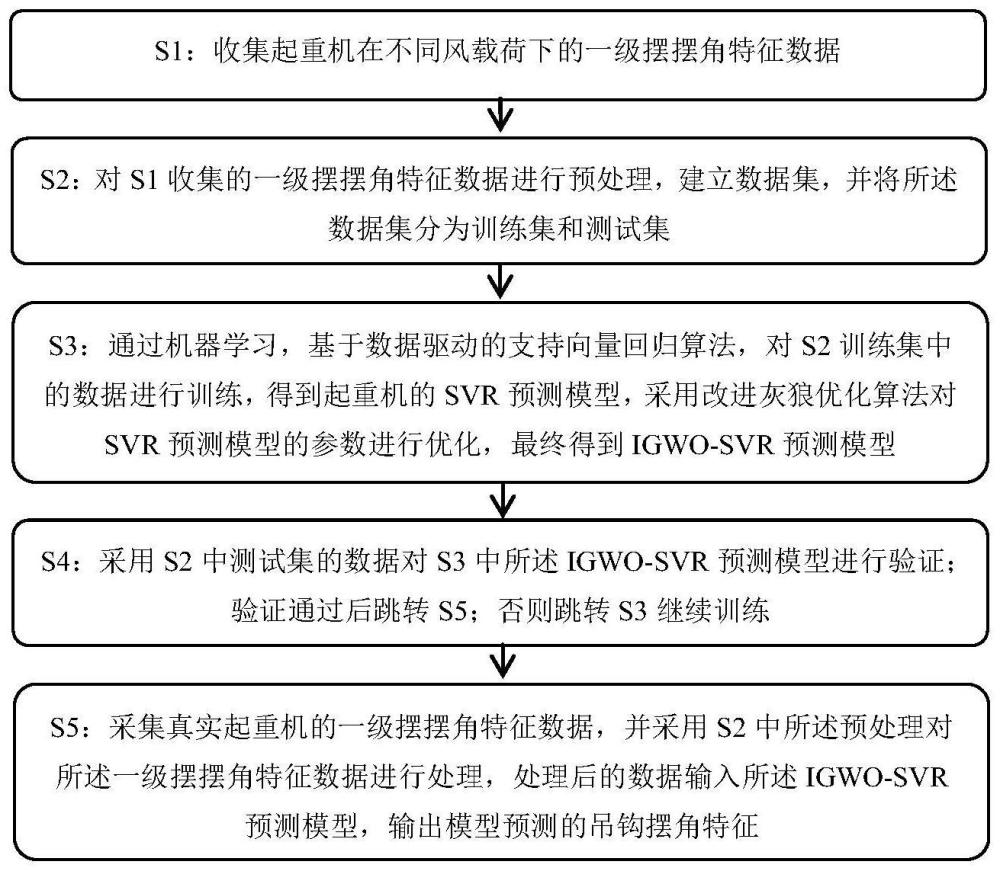
4、s1:收集起重机在不同风载荷下的一级摆摆角特征数据;所述一级摆摆角表示吊钩的摆角;所述特征数据包括面内角和面外角;所述面内角是吊钩相对静止状态下与坐标轴z轴形成的平面内摆角;所述面外角是吊钩相对静止状态下在垂直于面内角所在平面的摆角;所述坐标轴z轴所在坐标系为以起重机基座为坐标原点z轴向下建立的空间坐标系;
5、s2:对s1收集的一级摆摆角特征数据进行预处理,建立数据集,并将所述数据集分为训练集和测试集;
6、s3:通过机器学习,基于数据驱动的支持向量回归算法,对s2训练集中的数据进行训练,得到起重机的svr预测模型,采用改进灰狼优化算法对svr预测模型的参数进行优化,最终得到igwo-svr预测模型;
7、s4:采用s2中测试集的数据对s3中所述igwo-svr预测模型进行验证;验证通过后跳转s5;否则,跳转s3继续训练;
8、s5:采集真实起重机的一级摆摆角特征数据,并采用s2中所述预处理方法对所述一级摆摆角特征数据进行处理,处理后的数据输入所述igwo-svr预测模型,输出模型预测的吊钩摆角特征。
9、优选地,所述s1收集的特征数据包括东、西、南、北、东南、东北、西南和西北八个方向的不同风载荷下的的一级摆摆角特征数据。
10、优选地,所述s1中通过实验和/或开源数据集收集起重机在不同风载荷下的一级摆摆角特征数据。
11、优选地,s2中所述预处理包括:数据清理、数据集成、数据规约和数据变换;s2中所述数据集采用计算机建立。
12、优选地,s2中所述训练集和测试集的比例为4:1。
13、s3中所述igwo-svr预测模型输入风载荷,输出起重机一级摆摆角特征数据。
14、优选地,s3中所述支持向量回归为基于向量机下的一种机器学习回归算法。
15、s3中所述基于数据驱动的支持向量回归算法包括:
16、s301:给定数据集{(x1,y1),(x2,y2),...,(xi,yi)},所述给定数据集满足:其中xi是输入向量,yi是输出向量;利用所述给定数据集进行学习,得到一个回归模型:f(x)=wtx+b,使得f(x)与y尽可能接近,其中:y是xi所对应的yi,wt为权重向量,b是回归函数的偏差;wt和b是模型的参数,这两个值决定了f(x)与y的接近程度;
17、s302:支持向量回归允许f(x)与y之间最多有ò的误差,即当f(x)与y相差大于ò时才计算损失,其中ò被称为不灵敏损失参数,所述ò的值根据具体需求设置;引入松弛变量支持向量回归的优化表达式如下:
18、
19、其中:c为一个正权衡参数,用拉格朗日求解;xi是输入向量;yi是输出向量;s和t为引入松弛变量后用于公式变换的常量;w为权重向量;为松弛变量;公式(1)加入kkt条件,支持向量回归模型表示为:
20、
21、其中ai和是拉格朗日乘子,k(xi,xk)是核函数;b表示回归函数的偏差;
22、因为径向基核函数本身具有非线性逼近能力和泛化能力强的特点,所以选择径向基核函数作为svr的核函数,其表达式为:
23、
24、其中:g是高斯噪声分布的离散程度;‖xi-xk‖是两个特征向量之间的欧式距离;
25、由此可以得出,c,ò,g共同决定svr模型的复杂度和泛化能力。
26、优选地,采用改进灰狼优化算法对svr预测模型的三个参数c,ò,g进行优化,具体为:用r2作为igwo算法的适应度函数来优化参数c,ò和g,r2的计算方式为:
27、
28、其中,fi表示第i个样本的预测值,yi表示第i个样本的真实值,表示样本的平均值,j表示样本个数。
29、优选地,s4中所述验证方法为将所述igwo-svr预测模型在所述测试集上的平均绝对百分比误差、均方根误差及实验测得的数据与对应预测值之间的平均相对误差,作为判断验证是否通过的指标,如果三个值的大小不超过5%说明模型验证通过。
30、有益效果:
31、本发明提供一种基于机器学习的起重机吊钩摆角预测方法,收集起重机在不同风载荷下的一级摆摆角特征数据,所述特征数据包括的面内角和面外角,能够完整准确地反映摆角的位置;然后对收集的特征数据进行预处理,建立包含测试集和训练集的数据集;通过机器学习,基于数据驱动的支持向量回归算法,对s2训练集中的数据进行训练得到起重机的svr预测模型;基于数据驱动的预测方法在各种行业的数据预测领域中广泛应用,其主要是从给定的数据中得到预测模型,只需考虑输入输出,可大大提高预测速度,支持向量回归算法能够较好地处理小样本数据、非线性特性及高维度等问题,且具有较强的泛化能力,不易过拟合;然而,svr算法在实际应用过程中,其预测性能依赖于超参数设定,因此参数的选择是svr算法应用中的一个难题,本发明采用改进灰狼优化算法对svr的超参数进行优化,建立igwo-svr模型,提高svr的预测精度,所述igwo-svr模型能够快速、准确得出起重机吊钩摆角特征数据,经实测发现,将得到的风载荷数据输入所述igwo-svr模型后,只需要几秒的时间即可得到摆角特征且获取的摆角特征数据比现有技术获取的摆角数据更准确,解决现有技术获取起重机摆角时间长、速度慢、摆角信息不准确的问题;模型建立完成后,用户只需要将获取的当前起重机吊钩的风载荷输入igwo-svr模型就可以得到当前起重机的吊钩摆角特征数据,解决现有技术获取起重机吊钩摆角时成本高的问题。本发明提供的方法为工程师提供准确的起重机吊钩摆角的具体特征数据,并通过起重机吊钩摆角的具体特征数据获取当前的摆角信息,并获取当前起重机吊钩摆角相对上一次摆角的变化,方便工程师及时掌握起重机吊钩摆角的变化来确保安全,既提高了卸货效率也保障了生命财产安全。
32、本发明基于机器学习的起重机吊钩摆角预测方法,还具有以下优点:一是学习过程很快,训练速度快,模型泛化能力强,对不平衡的数据集,可以平衡误差;二是采用了优化算法,可以得到最优结果。
- 还没有人留言评论。精彩留言会获得点赞!