农作物种植行导航线检测方法、装置、设备及介质
本技术涉及农业生产领域,尤其涉及一种农作物种植行导航线检测方法、相应的装置、电子设备及计算机可读存储介质。
背景技术:
1、甘蔗是一种十分重要的经济作物,被广泛用于制糖、酿酒、造纸等工业生产活动中,其2022年的全球年产量约19亿吨。除草、喷洒农药和根区培土等多样化的田间管理任务,对于提高甘蔗产量和质量至关重要。目前,这些任务严重依赖于人工操作,迫切需要探索用于田间管理的智慧农业技术。导航作为发展智慧农业的重要技术之一,在实现甘蔗精确苗期管理与精准农机控制方面具有重要作用。
2、在农业应用上,视觉导航可分为基于垄内中心线的导航和基于种植行中心线的导航。国内外众多科研人员广泛使用了包括统图像处理、深度学习、激光雷达等在内的技术进行视觉导航线研究。可以看出,在基于垄内中心线导航方面,无论是基于经典的图像处理算法还是基于深度学习的算法,通常都依赖于相邻作物行之间的特征点提取、垄与种植行之间明显的颜色差异,以及相邻作物行之间不相交重叠叶片等有限条件。其中,基于语义分割的导航线提取,从实际应用的角度来看,在获得语义分割结果后,将其与下游低成本、轻量级边缘设备集成仍然颇具挑战性。而在基于种植行的视觉导航方面,其一直是过去二十多年的研究热点。深度学习算法作为广泛应用的技术之一,但这种方法要求全面的数据集、大量的图像标注、创造性的算法开发和严格的参数调整过程。此外,大多数深度学习算法缺乏在其他作物幼苗中的验证,因此,它们的泛化能力仍然有限。
3、目前在作物幼苗视觉导航领域的研究通常集中在针对特定场地、特定作物或特定生长阶段条件下的作物垄间导航或种植行导航,在甘蔗幼苗方面,相关研究鲜有报道。
4、综上,适应现有技术中基于语义分割的导航线提取,其与下游低成本、轻量级边缘设备集成仍然颇具挑战性,以及大多数深度学习算法缺乏在其他作物幼苗中的验证,它们的泛化能力仍然有限等问题,本技术人出于解决该问题的考虑作出相应的探索。
技术实现思路
1、本技术的目的在于解决上述问题而提供一种农作物种植行导航线检测方法、相应的装置、电子设备及计算机可读存储介质。
2、为满足本技术的各个目的,本技术采用如下技术方案:
3、适应本技术的目的之一而提出的一种农作物种植行导航线检测方法,包括:
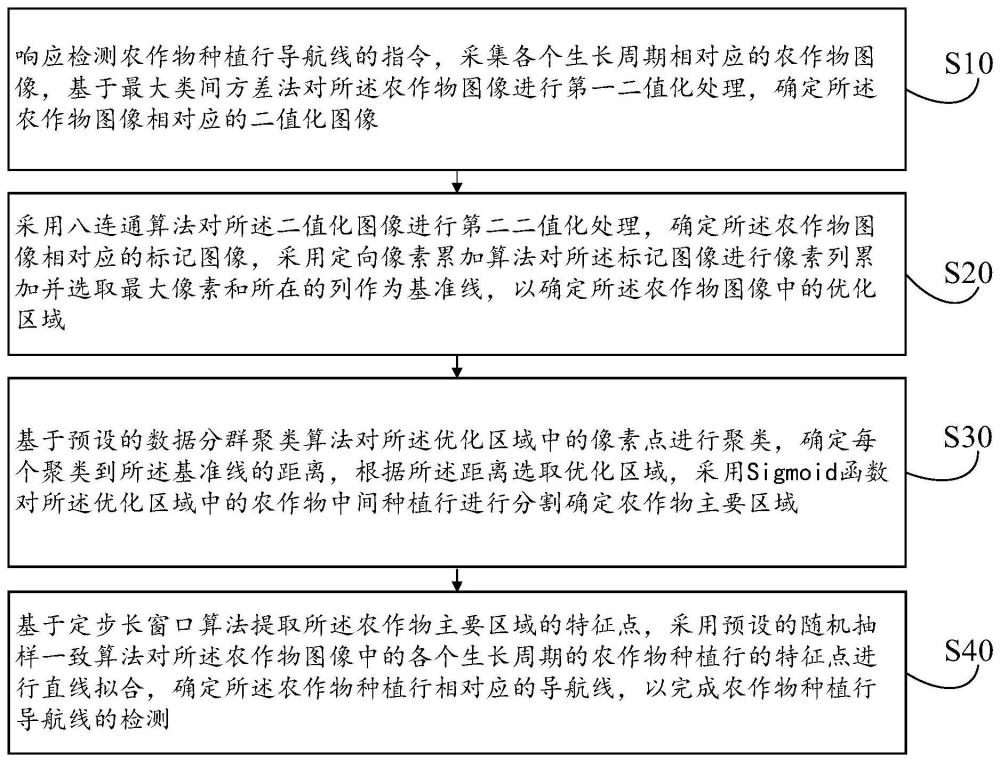
4、响应检测农作物种植行导航线的指令,采集各个生长周期相对应的农作物图像,基于最大类间方差法对所述农作物图像进行第一二值化处理,确定所述农作物图像相对应的二值化图像;
5、采用八连通算法对所述二值化图像进行第二二值化处理,确定所述农作物图像相对应的标记图像,采用定向像素累加算法对所述标记图像进行像素列累加并选取最大像素和所在的列作为基准线,以确定所述农作物图像中的优化区域;
6、基于预设的数据分群聚类算法对所述优化区域中的像素点进行聚类,确定每个聚类到所述基准线的距离,根据所述距离选取优化区域,采用sigmoid函数对所述优化区域中的农作物中间种植行进行分割确定农作物主要区域;
7、基于定步长窗口算法提取所述农作物主要区域的特征点,采用预设的随机抽样一致算法对所述农作物图像中的各个生长周期的农作物种植行的特征点进行直线拟合,确定所述农作物种植行相对应的导航线,以完成农作物种植行导航线的检测。
8、可选的,基于最大类间方差法对所述农作物图像进行第一二值化处理,确定所述农作物图像相对应的二值化图像的步骤之前,包括:
9、响应农作物图像预处理指令,调用预设的exg超绿特征灰度化算法,根据所述exg超绿特征灰度化算法对所述农作物图像进行灰度化处理,以确定所述农作物图像相对应的灰度图像;
10、调用预设的中值滤波算法对所述灰度图像进行中值滤波,以去除所述农作物图像的噪声;
11、基于预设的开运算算法对去除噪声后的灰度图像进行基于非零像素比率的开运算操作,以去除所述农作物图像相对应的灰度图像中的多余像素。
12、可选的,采用八连通算法对所述二值化图像进行第二二值化处理,确定所述农作物图像相对应的标记图像的步骤,包括:
13、响应对农作物图像相对应的二值化图像进行第二二值化处理的指令,调用预设的八连通算法;
14、基于所述八连通算法对所述二值化图像中的连通区域进行标记并采用面积比较进行第二二值化处理以消除较小的连通区域,确定所述农作物图像相对应的标记图像。
15、可选的,采用八连通算法对所述二值化图像进行第二二值化处理,确定所述农作物图像相对应的标记图像的步骤,包括:
16、确定所述农作物图像相对应的二值化图像i以及标记图像l;
17、响应初始化指令,将计数器k设置为0,所述计数器用于记录遇到的新的连通区域;
18、响应像素处理指令,对于所述二值化图像i中的每个像素(i,j)进行遍历,
19、若i(i,j)等于0,则在标记图像l中将该位置(i,j)设置为0,若i(i,j)不为0,则检查该像素周围的8个邻域像素;
20、响应邻域检查指令,创建一个集合n,在集合n中找到最小值m,所述集合n包含所有在二值化图像i中与(i,j)相邻的像素(p,q)且在标记图像l中这些像素的值大于0;
21、响应连通区域标记指令,若所述集合n为空,则增加计数器k的值,并在标记图像l的位置(i,j)标记为k,若所述集合n不为空,则在标记图像l的位置(i,j)标记为m;
22、响应连通区域优化指令,基于最小等价类算法对所述标记图像l进行处理,以优化连通区域的表示,确定处理后的标记图像l,所述标记图像l的尺寸为m乘以n。
23、可选的,基于预设的数据分群聚类算法对所述优化区域中的像素点进行聚类,确定每个聚类到所述基准线的距离的步骤,包括:
24、响应像素点聚类指令,获取农作物图像相对应的优化区域中的像素点、预设距离阈值以及最小点数量,所述预设距离阈值用于决定是否为邻域点的距离标准,所述最小点数量用于决定一个点是否被视为核心点;
25、调用预设的数据分群聚类算法,根据所述农作物图像中的像素点、预设距离阈值以及最小点数量采用所述数据分群聚类算法对农作物图像中的像素点进行聚类,确定每个聚类到所述基准线的距离。
26、可选的,基于定步长窗口算法提取所述农作物主要区域的特征点,采用预设的随机抽样一致算法对所述农作物图像中的各个生长周期的农作物种植行的特征点进行直线拟合,确定所述农作物种植行相对应的导航线的步骤,包括:
27、所述定步长窗口算法为:
28、
29、
30、其中,分别为步长m乘以n的滑动窗口内像素坐标的平均值;
31、所述预设的随机抽样一致算法为:
32、l*=argmax(a,b)∈l∣{p∈p∣d(p,ax+b)<t}∣,
33、
34、其中,表示给定的像素点集,l={(a,b)}表示待拟合直线的参数,d代表点p到直线的距离,l*代表最佳直线,|·|表示点集的大小,t表示由预实验确定的距离阈值,k表示寻找最大内点集过程中的算法迭代次数,cl表示0.99的置信度,表示当前正确模型的概率且n内点在第一次迭代时初始值为2,n表示每次模型评估时要求的最小点数量;
35、以及(a*,b*)=argmin(a,b)∈l∑p∈i(yi-axi-b)2,
36、其中,i={p∈p∣d(p,ax+b)<t}表示前一步得到的最佳内点集,(a*,b*)表示最终的农作物种植行导航线参数。
37、可选的,确定所述农作物种植行相对应的导航线的步骤之后,包括:
38、所述农作物图像包括水稻图像、甘蔗图像以及小麦图像的一项或任意多项,所述农作物种植行包括甘蔗幼苗种植行、水稻幼苗种植行以及小麦幼苗种植行的一项或任意多项;
39、响应对甘蔗幼苗种植行进行施肥或灭虫的指令,确定所述甘蔗幼苗种植行相对应的导航线;
40、田间机器人中的终端设备根据所述甘蔗幼苗种植行相对应的导航线,驱动所述田间机器人对甘蔗幼苗种植行间进行施肥或灭虫,以完成农作物种植行导航线的检测。
41、适应本技术的另一目的而提供的一种农作物种植行导航线检测装置,包括:
42、第一二值化处理模块,设置为响应检测农作物种植行导航线的指令,采集各个生长周期相对应的农作物图像,基于最大类间方差法对所述农作物图像进行第一二值化处理,确定所述农作物图像相对应的二值化图像;
43、第二二值化处理模块,设置为采用八连通算法对所述二值化图像进行第二二值化处理,确定所述农作物图像相对应的标记图像,采用定向像素累加算法对所述标记图像进行像素列累加并选取最大像素和所在的列作为基准线,以确定所述农作物图像中的优化区域;
44、主要区域确定模块,设置为基于预设的数据分群聚类算法对所述优化区域中的像素点进行聚类,确定每个聚类到所述基准线的距离,根据所述距离选取优化区域,采用sigmoid函数对所述优化区域中的农作物中间种植行进行分割确定农作物主要区域;
45、导航线确定模块,设置为基于定步长窗口算法提取所述农作物主要区域的特征点,采用预设的随机抽样一致算法对所述农作物图像中的各个生长周期的农作物种植行的特征点进行直线拟合,确定所述农作物种植行相对应的导航线,以完成农作物种植行导航线的检测。
46、适应本技术的另一目的而提供的一种电子设备,包括中央处理器和存储器,所述中央处理器用于调用运行存储于所述存储器中的计算机程序以执行本技术所述农作物种植行导航线检测方法的步骤。
47、适应本技术的另一目的而提供的一种计算机可读存储介质,其以计算机可读指令的形式存储有依据所述农作物种植行导航线检测方法所实现的计算机程序,该计算机程序被计算机调用运行时,执行相应的方法所包括的步骤。
48、相对于现有技术,本技术针对适应现有技术中基于语义分割的导航线提取,其与下游低成本、轻量级边缘设备集成仍然颇具挑战性,以及大多数深度学习算法缺乏在其他作物幼苗中的验证,它们的泛化能力仍然有限等问题,本技术包括但不限于如下有益效果:
49、其一、本技术在进行开运算操作时,建立起非零像素比率与开运算之间的对应数学关系,不同的非零像素比率对应不同苗龄期的农作物图像,通过多次的开运算操作和连通域的面积比较进行二次二值化可有效消除多余的像素信息,特别是在相邻作物枝叶的交界处,可让种植行之间的边界清晰,从而为后续处理打下坚实的数据基础;
50、其二,本技术在采用sigmoid函数进行阈值化时,将非零像素比率映射到0至1之间的范围,进而实现对像素累加曲线的阈值分割,去除离散枝叶,保留作物的优化区域,从而确保拟合的精度;
51、其三,本技术通过对农作物图像的一系列处理提取农作物种植行的导航线,对数据集的测试表明检测结果误差小,精度高,克服了泛化能力不足的缺点;
52、进一步的,本技术能够提供的农作物种植行导航线检测方法,能够显著地提高甘蔗种植行间的导航线的提取速度以及可靠性,有利于田间机器人根据所提取的导航线对甘蔗幼苗进行施肥或害虫消杀,大大提高田间机器人的工作效率,显著减少人力物力,本技术的农作物种植行导航线检测方法具有简单、可靠、实时性好等优点。
- 还没有人留言评论。精彩留言会获得点赞!