一种控制点与DSM高精度匹配方法和系统
本发明涉及地理信息系统和地图制图,特别涉及一种高程rmse为度量的控制点与dsm高精度匹配方法和系统。
背景技术:
1、数字表面模型(dsm)与控制点都在测绘、遥感领域中具有重要意义。dsm是一种描述地表特征高程的数字模型,为城市规划、资源管理和环境监测等领域提供关键的地理信息数据。控制点则通过高精度的测量提供地表位置的准确坐标。将dsm与控制点相结合,可以充分发挥二者的优势,通过匹配、平差等方式[1,2]提高dsm与控制点的精度和一致性。高精度控制点的坐标可以用于纠正dsm中的高程与平面信息,使其与控制点坐标一致,更准确的反应地表信息。高精度的dsm中高程与平面信息也可以用于控制点的质量的分析与评估[3]。这种协同作用不仅提高了地理空间数据的质量,也为地图制图、城市规划和资源管理等应用领域提供了更可靠的基础数据,促进了测绘领域的技术发展和应用创新。控制点与dsm的高精度匹配在协同作用中扮演着关键的角色。
2、现有的匹配方法主要有基于特征的匹配,通过检测显著的地表特征(如建筑物边缘、树木轮廓等)来实现[4]。此类方法对于不同类型地貌和场景的适应性有一定的局限性,特征提取的优劣直接影响最终匹配的精度,当特征不够明显时,此方法的适用性会大幅降低。基于地形的匹配方法[5,6]通过在dsm和控制点之间进行地形校正,考虑地表特征的变化和地形的复杂性。这种方法能够更好地适应不同地貌条件,但也需要较为精确的地形模型和复杂的计算过程。由于dsm为栅格影像的形式,而控制点为三维坐标的离散点,两种数据属性差异较大,针对此类不同属性的数据直接进行匹配难度较大。可以将三维控制点进行栅格化,再充分利用已有的成熟的图像匹配算法对两幅栅格影像进行匹配,从而实现控制点与dsm匹配[7]。但该方法再控制点数据转化为栅格数据的过程中会不可避免地引入误差,从而降低了匹配的精度。
3、参考文献
4、[1]wang t,fang y,zhang s,等.biases analysis and calibration oficesat-2/atlasdata based on crossover adjustment method[j/ol].remote sensing,2022,14(20):5125.https://doi.org/10.3390/rs14205125;
5、[2]grodecki j,dial g.block adjustment of high-resolution satelliteimages described by rational polynomials[j/ol].photogrammetric engineering&remote sensing,2003,69(1):59-68.https://doi.org/10.14358/pers.69.1.59;
6、[3]gao m,xing s,zhang g,等.assessment of icesat-2’s horizontalaccuracy using an iterative matching method based on high-accuracy terrain s[j/ol].remote sensing,2023,15(9):2236.https://doi.org/10.3390/rs15092236;
7、[4]李德仁,钟成.利用6元组松弛法自动配准lidar数据与航空影像[j].武汉大学学报(信息科学版),2009,34(12):1426-1430;
8、[5]余锦慧,刘学军,王美珍.dem局部地形形态误差度量模型[d].南京师范大学,2022;
9、[6]来文艺,方勇.星载光子计数点云联合卫星影像区域网平差方法研究[d].长安大学,2023;
10、[7]邓非,杨海关,李丽英.基于互信息的lidar与光学影像配准方法[j].测绘科学,2009,34(06):51-52。
技术实现思路
1、本发明针对现有技术的缺陷,提供了一种控制点与dsm高精度匹配方法和系统。
2、为了实现以上发明目的,本发明采取的技术方案如下:
3、一种控制点与dsm高精度匹配方法,包括以下步骤:
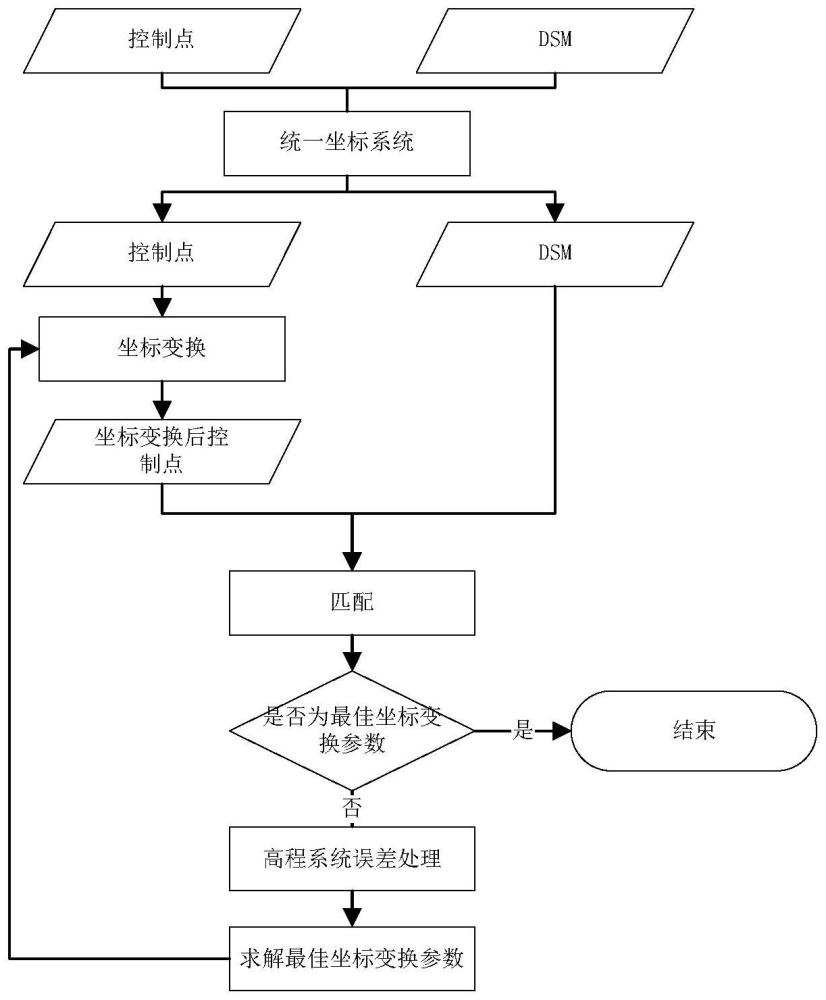
4、步骤1:检查控制点与dsm是否为同一坐标系统,若不一致,将二者转化为同一坐标系统。将控制点与dsm转化为对应带号下的utm投影。
5、步骤2:对控制点进行基于平移旋转参数的坐标变换,获取经过平移旋转后的控制点坐标。
6、步骤3:将坐标变换后控制点与dsm匹配,根据坐标变换后控制点平面坐标计算出每个控制点在dsm的行列号及对应的dsm高程值。
7、步骤4:计算控制点与dsm高程值之间的系统误差,计算控制点高程与dsm高程残差值。计算控制点高程与dsm高程残差平均值,将该值作为高程系统误差,控制点高程减去高程残差平均值,消除系统误差。
8、步骤5:循环步骤2~4求解最佳坐标变换参数。当经过坐标变换之后的控制点与dsm之间高程rmse最小时,对应的旋转平移参数即为最佳坐标变换参数。
9、步骤6:使用最佳坐标变换参数重复步骤2~3,即可得到最佳匹配结果。
10、步骤7:利用匹配结果,结合地理空间数据,进行数据处理和分析,包括:地形分析、地貌特征提取和地理信息系统数据处理,确定需要呈现在地图上的地理信息。
11、步骤8:利用地理信息系统软件,将处理后的数据、分析结果以及最佳匹配结果结合起来,制作出地图并呈现。
12、进一步地,所述步骤2中,获取经过平移旋转后的控制点坐标通过以下公式得到:
13、
14、其中,xi、yi为坐标变换后控制点坐标;xi、yi为坐标变换前控制点坐标;x0、y0为旋转中心;θ为旋转参数;δx、δy为平移参数;hi为控制点高程。
15、进一步地,所述步骤3通过以下公式计算:
16、
17、其中,row、col为控制点在dsm的行列号;xi、yi为坐标变换后控制点坐标;min(xdsm)、min(ydsm)分别为dsm横纵坐标最小值;[*]为取整函数;hdsm为对应的dsm高程值。
18、进一步地,步骤4中,计算控制点与dsm高程值之间的系统误差,如下式:
19、
20、其中,ε为高程系统误差;hi为控制点高程值;hdsm为每个控制点所对应的dsm高程值;为系统误差校正后的控制点高程值;n为控制点个数。
21、进一步地,步骤5中,构建以高程rmse为度量,求解最佳坐标变换参数的数学模型如公式(4)所示:
22、
23、高程rmse的计算如下式:
24、rmse=f(θ,δx,δy) (5)
25、当三元函数f(θ,δx,δy)求得极小值时,自变量取值即为最佳坐标变换参数。
26、本发明公开了一种控制点与dsm高精度匹配系统,该系统能够用于实施上述的控制点与dsm高精度匹配方法,包括:
27、坐标系统转换模块:用于检查和转换控制点和dsm的坐标系统,确保在同一坐标系统下进行匹配。
28、坐标变换模块:对控制点进行基于平移旋转参数的坐标变换,获取经过平移旋转后的控制点坐标。
29、匹配模块:将坐标变换后的控制点与dsm进行匹配,计算出每个控制点在dsm的行列号及对应的dsm高程值。
30、误差计算模块:计算控制点与dsm高程值之间的系统误差,计算控制点高程与dsm高程残差值,并消除系统误差。
31、参数求解模块:循环求解最佳坐标变换参数,以获得最小的高程均方根误差,确定最佳的坐标变换参数。
32、匹配结果输出模块:使用最佳坐标变换参数重复匹配步骤,得到最佳匹配结果。
33、数据处理与分析模块:利用匹配结果,结合地理空间数据进行地形分析、地貌特征提取和地理信息系统数据处理。
34、本发明还公开了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述一种控制点与dsm高精度匹配方法。
35、与现有技术相比,本发明的优点在于:
36、1.适用区域广泛、不需要外部数据进行辅助、评价结果直观、匹配精度高的优点。
37、2.本发明实现的匹配结果,当dsm精度较高时,可将匹配结果用于纠正控制点的平面位置消除系统误差以及控制点平面精度的评定。
38、3.本发明实现的匹配结果,当控制点精度较高时,可将匹配结果用于纠正dsm的平面位置消除系统误差。
39、4.能够自动并快速识别控制点和dsm数据并进行匹配处理,节省人力成本和时间成本,提高工作效率,减少错误和误差。
- 还没有人留言评论。精彩留言会获得点赞!