全景监控图像处理方法及处理系统与流程
本发明涉及图像处理,具体涉及一种全景监控图像处理方法及处理系统。
背景技术:
1、随着虚拟现实、增强现实技术的快速发展,全景视频、全景图像因能给用户带来360度全方位的、沉浸式的观看体验而被广泛接受。
2、对于全景监控而言,全景监控摄像头是一种可以覆盖360度视角的摄像头。全景监控摄像头有多种类型,包括鱼眼镜头、广角镜头等。这些不同类型的摄像头各有优缺点,适用于不同的应用场景。例如,鱼眼镜头可以覆盖更大的视角,但图像畸变较大;广角镜头则可以拍摄更广阔的视角,但需要更复杂的拼接技术。或者全景监控还可以是由多个摄像头组成,以全方位地拍摄周围的环境。
3、现有的全景监控图像的处理过程中,通常需要将一个完整的全景图像转换为一个矩形的图片视角,以便于监控人员对监控图像进行观测和处理。由于成像条件等因素的影响,目前全景图像在处理的过程对于处理器的要求较高,导致全景图像在处理过程中时间缓慢且对于处理器的要求较高。
技术实现思路
1、鉴于以上现有技术的缺点,本发明的目的在于公开一种全景监控图像处理方法及处理系统,以改善现有的全景图像在处理过程中,实际处理效果不佳,以及对于处理器的要求较高的问题。
2、为实现上述目的,本发明公开一种全景监控图像处理方法,其包括:
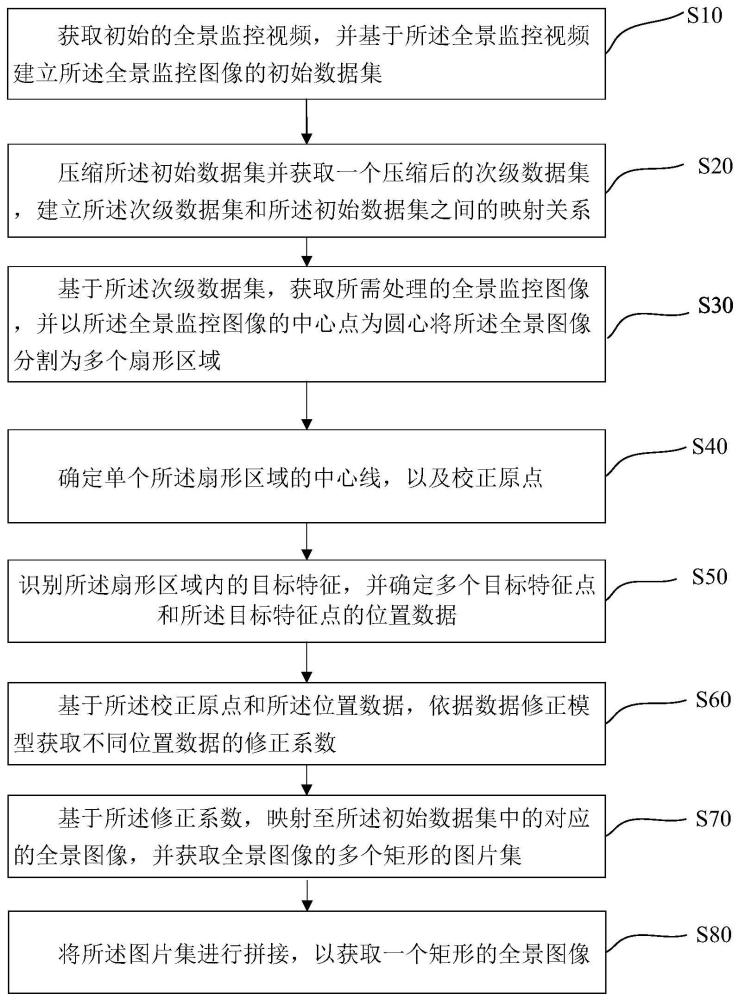
3、获取初始的全景监控视频,并基于所述全景监控视频建立所述全景监控图像的初始数据集;
4、压缩所述初始数据集并获取一个压缩后的次级数据集,建立所述次级数据集和所述初始数据集之间的映射关系;
5、基于所述次级数据集,获取所需处理的全景监控图像,并以所述全景监控图像的中心点为圆心将所述全景图像分割为多个扇形区域;
6、确定单个所述扇形区域的中心线,以及校正原点;
7、识别所述扇形区域内的目标特征,并确定多个目标特征点和所述目标特征点的位置数据;
8、基于所述校正原点和所述位置数据,依据数据修正模型获取不同位置数据的修正系数;
9、基于所述修正系数,映射至所述初始数据集中的对应的全景图像,并获取全景图像的多个矩形的图片集;
10、将所述图片集进行拼接,以获取一个矩形的全景图像。
11、在本发明一方案中,在所述获取初始的全景监控视频,并基于所述全景监控视频建立所述全景监控图像的初始数据集的步骤中,包括:
12、将录制的全景视频分割成一系列的静态图像帧,每个帧表征视频中的一帧;
13、对每个图像帧进行去噪和色彩校正的图像处理;
14、为处理后的图像汇集至初始数据集中,并为每一帧图打印标签信息。
15、在本发明一方案中,在所述压缩所述初始数据集并获取一个压缩后的次级数据集,建立所述次级数据集和所述初始数据集之间的映射关系的步骤中,包括:
16、选择压缩算法,对所述初始数据集内的每一个图像帧进行压缩,并获取低清晰度的全景图片数据,并获取包括所有低清晰度的全景图片数据的次级数据集;
17、创建一个映射表,用于存储次级数据集中每个图像帧与初始数据集中对应图像帧的映射关系;
18、为每个次级图像帧分配一个唯一的标识符,该标识符指向初始数据集中相应的图像帧。
19、在本发明一方案中,还包括步骤:
20、验证映射关系,其包括:
21、检查并验证所建立的映射关系的准确性,即每个次级数据集中的图像帧是否正确地映射到初始数据集中对应的图像帧;
22、若存在错误或遗漏,则进行调整并重新验证;以及
23、存储和管理,将压缩后的次级数据集和映射关系存储在数据库或专门的数据管理工具。
24、在本发明一方案中,在基于所述次级数据集,获取所需处理的全景监控图像,并以所述全景监控图像的中心点为圆心将所述全景图像分割为多个扇形区域的步骤中,包括:
25、从次级数据集中选择需要处理的特定全景监控图像,并确定所选全景监控图像的中心点;
26、以中心点为圆心,将全景图像分割成多个扇形区域。
27、在本发明一方案中,在所述以中心点为圆心,将全景图像分割成多个扇形区域的步骤中,所述扇形区域的分隔路径上像素内容是位于一个预设的阈值以下;以及
28、所述扇形区域角度大于30度。
29、在本发明一方案中,在所述识别所述扇形区域内的目标特征,并确定多个目标特征点和所述目标特征点的位置数据步骤中,还包括:
30、使用特征检测算法识别扇形区域内的目标特征,并确定多个目标特征点;
31、并基于所述中心点建立一轴坐标,以及确定多个目标特征点的位置数据,其中所述位置数据包括所述目标特征点的轴坐标值。
32、在本发明一方案中,在所述基于所述修正系数,映射至所述初始数据集中的对应的全景图像,并获取全景图像的多个矩形的图片集中,还包括:
33、基于所述映射关系,对所述初始数据集中的全景图像数据进行分割处理,以获取多个扇形区域的全景图像碎片;以及
34、基于所述修正系数,对相应的扇形区域的全景图像碎片进行修正处理,并获取所述全景图像的多个矩形图片。
35、在本发明一方案中,在所述将所述图片集进行拼接,以获取一个矩形的全景图像的步骤中,包括:
36、确定所述矩形图片的边沿,并对相邻边沿的矩形图片进行融合处理,以获取一个完整的矩形的全景图片;以及
37、对完整的矩形的全景图片进行去噪和色彩校正的图像处理。
38、本发明还提供一种全景监控图像处理系统,其包括:
39、图像获取模块,其用于获取初始的全景监控视频,并基于所述全景监控视频建立所述全景监控图像的初始数据集;
40、图像处理模块,其用于压缩所述初始数据集并获取压缩后的次级数据集,建立所述次级数据集和所述初始数据集之间的映射关系;
41、图像分割模块,其用于基于所述次级数据集,获取所需处理的全景监控图像,并以所述全景监控图像的中心点为圆心将所述全景图像分割为多个扇形区域;
42、图像定位模块,其用于确定单个所述扇形区域的中心线,以及校正原点;
43、图像识别模块,其用于识别所述扇形区域内的目标特征,并确定多个目标特征点和所述目标特征点的位置数据;
44、修正系数获取模块,其用于基于所述校正原点和所述位置数据,依据数据修正模型获取不同位置数据的修正系数;
45、修正调整模块,其用于基于所述修正系数,映射至所述初始数据集中的对应的全景图像,并获取全景图像的多个矩形的图片集;
46、图像拼接模块,其用于将所述图片集进行拼接,以获取一个矩形的全景图像。
47、综上所述,本发明公开一种全景监控图像处理方法及系统,通过该全景监控图像处理方法通过对低清晰度的全景图像进行处理,以获取对应的处理规则。同时通过映射关系,将该处理规则映射至高清晰度的原始的全景图像中,以降低处理器直接对高清晰度图像处理时的压力。因此,可有效提高对全景图像的处理速度和处理效果。因此,可有效改善现有的全景图像在处理过程中,实际处理效果不佳,以及对于处理器的要求较高的问题。
- 还没有人留言评论。精彩留言会获得点赞!