一种基于航拍和激光雷达的建模方法和电子设备
本技术涉及三维建模,特别涉及一种基于航拍和激光雷达的建模方法和电子设备。
背景技术:
1、现有技术中,航拍已经成为了常见的三维建模技术的途径,由于航拍的特点,基于航拍的三维建模方法对场景中较高的部分很有效,但难以还原对底部的三维形状细节,因此,仅仅依靠航拍进行三维建模,不能取得良好的建模效果。
技术实现思路
1、本技术提供一种基于航拍和激光雷达的建模方法,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、根据本技术的第一方面技术方案的基于航拍和激光雷达的建模方法,包括以下步骤:
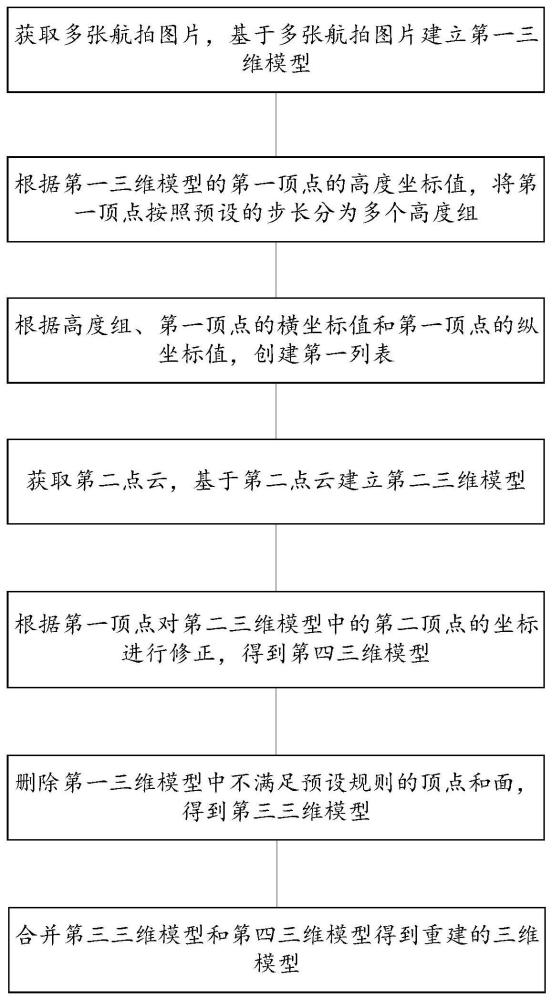
3、获取多张航拍图片,基于多张所述航拍图片建立第一三维模型;
4、根据所述第一三维模型的第一顶点的高度坐标值,将所述第一顶点按照预设的步长分为多个高度组;
5、根据所述高度组、所述第一顶点的横坐标值和所述第一顶点的纵坐标值,创建第一列表;
6、获取第二点云,基于所述第二点云建立第二三维模型;
7、根据所述第一顶点对所述第二三维模型中的第二顶点的坐标进行修正,得到第四三维模型;
8、删除所述第一三维模型中不满足预设规则的顶点和面,得到第三三维模型;
9、合并所述第三三维模型和所述第四三维模型得到重建三维模型;
10、其中,所述第一顶点是所述第一三维模型的顶点,所述第二顶点是所述第二三维模型的顶点,所述第二点云通过激光雷达扫描获取。
11、根据本技术的一些技术方案,在所述将所述第一顶点按照预设的步长分为多个高度组之前,还包括:
12、对所述第一三维模型进行水平旋转,使所述第一三维模型的正北方向为横坐标轴正方向,使所述第一三维模型的正东方向为纵坐标轴正方向;
13、对所述第一三维模型进行水平平移,使所述第一顶点的横坐标值和所述第一顶点的纵坐标值为正值。
14、根据本技术的一些技术方案,所述根据所述第一三维模型的第一顶点的高度坐标值,将所述第一顶点按照预设的步长分为多个高度组,包括:
15、查找所述第一顶点的高度坐标最大值和高度坐标最小值,分别记作zmax和zmin;
16、根据所述预设的步长,将所述第一顶点按照高度坐标值分为多个高度组,所述高度组表示为:第n组:[zmax-(n-1)h,zmax-nh),n为正整数,h为所述预设步长;
17、其中,最后一组表示为:[zmax-(n-1)h,zmin]。
18、根据本技术的一些技术方案,所述根据所述高度组、所述第一顶点的横坐标值和所述第一顶点的纵坐标值,创建第一列表,包括:
19、将不包括所述第一顶点的高度组设置为空组,并将所述空组的高度坐标值的范围录入所述第一列表;
20、通过所述第一顶点的高度坐标最大值和高度坐标最小值,设置面积倍率递减参数,记为r;
21、查询每一个非空组的所述高度组,若第一高度组与第二高度组相邻,则根据相邻的两个高度组中的所述第一顶点的横坐标值、所述第一顶点的纵坐标值和所述面积倍率递减参数记录所述第一列表;
22、其中,所述第一高度组是高度坐标值的上界为zmax-jh的所述高度组,所述第二高度组是高度坐标值的上界为zmax-(j-1)h的所述高度组,j为任意整数。
23、根据本技术的一些技术方案,所述根据相邻的两个高度组中的所述第一顶点的横坐标值、所述第一顶点的纵坐标值和所述面积倍率递减参数记录所述第一列表,包括:
24、如果所述第一高度组中的所述第一顶点的横坐标最大值小于所述第二高度组中的所述第一顶点的横坐标最大值的(1-r)倍,则将所述第一高度组录入所述第一列表,否则,执行第二判断;
25、所述第二判断是:如果所述第一高度组中的所述第一顶点的纵坐标最大值小于所述第二高度组中的所述第一顶点的纵坐标最大值的(1-r)倍,则将所述第一高度组录入所述第一列表,否则,执行第三判断;
26、所述第三判断是:如果所述第一高度组中的所述第一顶点的横坐标最小值大于所述第二高度组中的所述第一顶点的横坐标最大值的(1+r)倍,则将所述第一高度组录入所述第一列表,否则,执行第四判断;
27、所述第四判断是:如果所述第一高度组中的所述第一顶点的纵坐标最小值大于所述第二高度组中的所述第一顶点的纵坐标最大值的(1+r)倍,则将所述第一高度组录入所述第一列表。
28、根据本技术的一些技术方案,所述获取第二点云,包括:
29、发送所述第一列表至地面设备,所述地面设备携带有激光雷达;
30、获取所述第二点云;
31、其中,所述第二点云是根据所述地面设备的位置坐标的高度坐标值进行修正之后的点云数据,所述地面设备的高度坐标值不高于第一设定高度,所述第一设定高度是根据所述第一列表中具有最低高度坐标值上界的分组的上界坐标进行设定。
32、根据本技术的一些技术方案,所述基于所述第二点云建立第二三维模型,包括:
33、剔除高度坐标值高出预设高度的所述第二点云中的点云数据;
34、根据剩余的所述点云数据建立第二三维模型;
35、其中,所述预设高度是根据所述第一列表中的高度坐标最大值和预设的步长值的和进行设置。
36、根据本技术的一些技术方案,所述根据所述第一顶点对所述第二三维模型中的第二顶点的坐标进行修正,包括:
37、将所述第二三维模型中符合预设特征的第二顶点设置为第四顶点;
38、将所述第一顶点中的高度坐标数值落入第一高度值和第二高度值区间以内的顶点设置为第三顶点,所述第一高度值为所述第四顶点中的高度坐标的最小值,所述第二高度值为所述第四顶点中的高度坐标的最大值;
39、根据第一算式对所述第二顶点的坐标进行修正;
40、所述第一算式表示为:
41、
42、
43、
44、其中,(xk,yk,zk)是第二顶点的初始坐标,是第二顶点的修正坐标,xmaxa是所述第三顶点中的横坐标最大值,xmaxb是所述第四顶点中的横坐标最大值,ymaxa是所述第三顶点中的纵坐标最大值,ymaxb是所述第四顶点中的纵坐标最大值;
45、其中,所述预设特征是指,所述第二顶点中的高度坐标值大于所述第一列表中的高度坐标最大值的顶点。
46、根据本技术的一些技术方案,所述删除所述第一三维模型中不满足预设规则的顶点和面,包括:
47、删除所述第一三维模型中的第一三角面,所述第一三角面的三个所述第一顶点的高度坐标值均小于所述第四顶点中的高度坐标最大值;
48、删除所述第一三维模型中不属于任何三角面的所述第一顶点。
49、根据本技术的第二方面技术方案的一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的方法。
50、本技术至少具有如下有益效果:
51、本技术通过航拍图片建立第一三维模型,通过第一三维模型创建第一列表;获取激光雷达采集的第二点云,基于第二点云建立第二三维模型;根据第一三维模型中的第一顶点对第二三维模型中的第二顶点的坐标进行修正,得到第四三维模型;通过删除第一三维模型中不满足预设规则的顶点和面,得到第三三维模型;合并第三三维模型和所述第四三维模型得到重建三维模型,以此能够重建场景中被航拍忽视的底部三维形状。
52、可以理解的是,上述第二方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
53、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!