一种基于贝叶斯神经网络的行人轨迹融合预测方法
本发明属于行人轨迹预测,具体涉及一种基于贝叶斯神经网络的行人轨迹融合预测方法。
背景技术:
1、行人轨迹预测任务旨在基于行人历史轨迹信息的分析并结合环境信息,来预测行人在未来时刻的位置坐标。行人轨迹预测已经成为众多领域的研究热点,包括自动驾驶、机器人导航和视频监控等。例如,在自动驾驶领域中,行人轨迹的精准预测有利于提升驾驶车辆的安全性;在机器人导航任务中,行人轨迹预测可以帮助机器人避免碰撞以实现机器人在人群中穿梭的导航任务;在视频监控中,预测行人轨迹有助于人群密度控制,避免踩踏事故发生。因此,实现行人轨迹的准确预测具有重要意义。现已有大量的关于行人轨迹预测的研究,如公开号为cn113888638a和cn111161322a的专利申请。
2、由于行人轨迹的图像数据采集中存在传输不确定性、定位系统被关闭或视频监控盲区、数据采样率低等问题,会导致数据丢失或数据异常情况发生,从而使行人轨迹数据缺失或中断,对目标追踪等造成影响。因此,我们考虑采用行人轨迹预测方法对缺失轨迹段进行预测,并对预测轨迹进行轨迹融合,解决行人轨迹缺失问题。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于贝叶斯神经网络的行人轨迹融合预测方法,解决了现有技术中的当数据量较少时容易导致过拟合,无法对缺失或中断行人轨迹进行准确预测的问题。
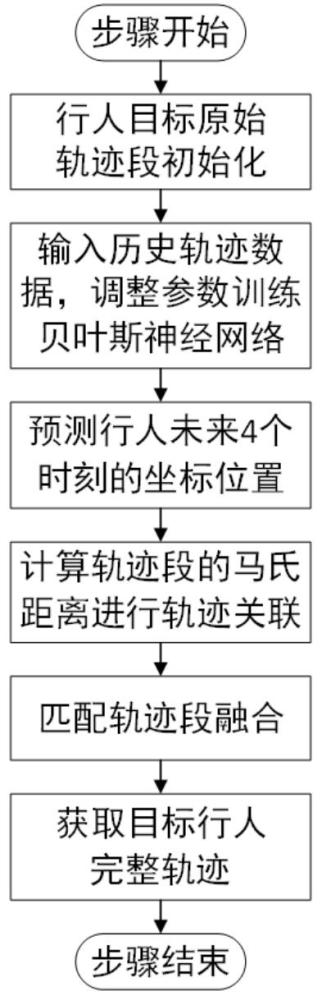
2、本发明提供了一种基于贝叶斯神经网络的行人轨迹融合预测方法,包括以下步骤:
3、步骤1,获取两条真实行人原始轨迹的初始化信息;
4、步骤2,获取两条真实行人原始轨迹的初始化信息中因缺失生成的缺失真实行人轨迹历史信息;基于缺失真实行人轨迹历史信息训练贝叶斯神经网络获得预测模型;
5、步骤3,使用预测模型获得两条真实行人原始轨迹的预测缺失轨迹段;
6、步骤4,获取预测缺失轨迹段之间的马氏距离;基于马氏距离获得各段预测缺失轨迹段的相似性;根据各段预测缺失轨迹段的相似性确定来自同一目标的预测缺失轨迹段;将来自同一目标的预测缺失轨迹段进行轨迹关联融合获得融合轨迹段;
7、步骤5,比较获得的融合轨迹段与两条真实行人原始轨迹的匹配度,如果匹配,获得最终预测模型,进入步骤6;如果不匹配,调整贝叶斯神经网络,返回步骤2;
8、步骤6,使用最终预测模型预测完整行人轨迹。
9、可选地,步骤1包括以下步骤:
10、步骤11,获得两条真实行人原始轨迹的标注坐标;
11、步骤12,获取标注坐标的世界坐标;将世界坐标转换为像素坐标;
12、步骤13,将标注坐标的像素坐标向量作为真实行人原始轨迹的初始化信息。
13、可选地,步骤2包括以下步骤:
14、步骤21,获取步骤1的真实行人原始轨迹的初始化信息中因缺失生成的四条缺失真实行人轨迹历史信息;
15、步骤22,向四条缺失真实行人轨迹历史信息中加入高斯噪声,获得四条增强缺失真实行人轨迹历史信息;
16、步骤23,基于四条增强缺失真实行人轨迹历史信息训练贝叶斯神经网络获得预测模型。
17、可选地,步骤23包括以下步骤:
18、步骤231,设置基于设定隐藏神经元数的贝叶斯神经网络的正态分布,从正态分布中采样第 k条增强缺失真实行人轨迹在贝叶斯神经网络中的当前次网络权重, i=1,2,…, i, i表示网络权重更新最大次数, k=1,2,3,4;
19、步骤232,基于四条增强缺失真实行人轨迹历史信息分别获取四条增强缺失真实行人轨迹当前次的近似分布、先验分布和似然;
20、其中,表示第 j个时刻第 k条增强缺失真实行人轨迹在 y方向上的位置坐标, j=1,2,…, j, j表示当前次的总时刻数;表示第 j个时刻第 k条增强缺失真实行人轨迹在 x方向上的位置坐标;
21、步骤233,基于当前次的近似分布、先验分布和似然分别获得四条增强缺失真实行人轨迹变分下界,表达式为:
22、;
23、步骤234,利用 kl散度度量近似分布与后验分布的距离优化四条增强缺失真实行人轨迹当前次模型参数,表达式为:
24、
25、其中,表示第 k条增强缺失真实行人轨迹当前次给定正态分布的参数后权重参数的分布;表示第 k条增强缺失真实行人轨迹当前次给定网络参数后观测数据的似然;表示第 k条增强缺失真实行人轨迹当前次的观测数据;
26、步骤235,采用梯度下降法获得四条增强缺失真实行人轨迹的更新模型参数,表达式为:
27、;
28、其中,表示第 k条增强缺失真实行人轨迹的更新模型参数;表示学习率;表示第 k条增强缺失真实行人轨迹当前次模型参数的梯度;
29、步骤236,判断 i是否大于迭代轮次,如果 i大于等于迭代轮次,使用第 k条增强缺失真实行人轨迹的更新模型参数获得预测模型;如果 i小于迭代轮次,令 i= i+1,返回步骤231。
30、可选地,基于每两段预测缺失轨迹段之间的马氏距离获取相似性;根据各两段预测缺失轨迹段的相似性确定来自同一目标的预测缺失轨迹段;将来自同一目标的两段预测缺失轨迹段进行轨迹关联融合。
31、可选地,将两段预测缺失轨迹段置之间的马氏距离最小的两段预测缺失轨迹段确定为最佳相似性;将该两段预测缺失轨迹段确定为来自同一目标的预测缺失轨迹段;将剩下两段预测缺失轨迹段确定为来自另一个同一目标。
32、与现有技术相比,本发明至少具有现如下有益效果:
33、(1)本发明的方法利用贝叶斯神经网络模型随机分布的权值和阈值参数,为神经网络引入不确定性进行正则化、引入先验分布和后验分布来描述模型参数的不确定性。在训练过程时,通过最大化后验概率来更新模型参数,从而得到后验分布;通过后验分布,网络可以获取参数的不确定性信息,进而对结果的误差进行有效预测。能够有效避免数据量较少时容易导致过拟合的问题(如单个行人历史轨迹数据信息),提高模型的稳定性和泛化能力。
34、(2)本发明的方法提出了基于轨迹预测与轨迹关联的融合方法,即对缺失轨迹段进行预测,并对预测后的轨迹进行关联分析,确定是否属于同一目标,对来自同一目标的轨迹进行融合获得完整的行人轨迹,解决了目标跟踪过程中行人轨迹缺失或中断的问题。
- 还没有人留言评论。精彩留言会获得点赞!