一种基于人工水母搜索算法的无人机群布阵优化方法
本发明属于目标定位,具体涉及一种基于人工水母搜索算法的无人机群布阵优化方法。
背景技术:
1、有源雷达具有远距离探测、全天候工作、受环境影响小等优点,然而,随着隐身技术、无源侦察技术以及综合电子干扰等信息对抗技术的不断发展,有源雷达探测定位系统面临着新的威胁和挑战。与有源雷达系统相比,无源雷达凭借被动探测的特点,使其不易被敌方发现,可免遭反辐射导弹的攻击,具有很强的抗干扰和生存能力。因此,在现如今雷达外部电磁环境急剧恶化的情况下,无源雷达成为有效探测目标的一种重要途径并具有重要的研究价值。无源定位技术可以分为基于目标辐射源的无源定位和基于非合作外辐射源的无源定位。当目标处于无线电静默状态时,基于目标辐射源的定位方法将无法发挥作用,而基于外辐射源的定位系统可以通过接收目标反射的外辐射源信号来获取目标信息,从而实现空中目标的监视和边境防御。
2、低轨卫星时差定位系统就是一种利用外辐射源进行定位的体制。它利用低轨卫星作为信号发射源,无人机作为接收站接收信号并对目标进行定位和跟踪的技术。虽然相关技术研究较少,但这种体制具有非常重要的应用价值。低轨卫星因其广泛的覆盖范围,能够提供强大的无线通信服务,从而打破了地理环境的限制,使得信息传递得以畅通无阻。同时,由于其轨道高度较低,信号传输时间大为缩短,可以快速、准确地获得定位结果。此外,低轨卫星的传输带宽较大,使得数据传输速度大幅提升,进一步增强了系统的实时性。与此同时,随着无人机技术的不断发展和普及,无人机在多个领域都得到了广泛应用。利用多架无人机作为观测平台可以实现多站外辐射源高精度定位,同时也可以让无人机灵活地部署在各种环境中,从而提高作业效率和精度,带来更灵活、更安全、更可靠的解决方案。此外,对于外辐射源定位系统,基站的布局不同会对目标的定位精度产生很大影响。为了提高目标的定位精度,还需要优化低轨卫星时差定位系统的站址。
3、在解决时差定位系统最优布站问题时,传统解析算法和群智能算法都有其独特的应用。传统解析算法主要通过理论推导,求得在特定位置的最优布站位置,但传统的解析算法存在计算复杂度高、现实情况中布站区域情况复杂且无法实现规则布站等问题,因此其方法不具有普遍适用性。群智能算法包括蚁群优化算法、差分进化算法、粒子群算法、模拟退火算法等,原理简单、计算方便,被更多的采用。比如文献《基于遗传算法的tdoa(timedifference of arrival,到达时间差)定位系统的最优布站算法》(汪波,薛磊.基于遗传算法的tdoa定位系统的最优布站算法[j].系统工程与电子技术,2009,31(09):2125-2128.)利用遗传算法,遵循目标空间定位误差的克拉美罗界的平均值最小的最佳布站原则,寻找规定平面区域内tdoa定位系统的最佳布站;文献《基于粒子群算法的多机无源定位系统优化布站》(王程民,平殿发,宋斌斌,等.基于粒子群算法的多机无源定位系统优化布站[j].计算机与数字工程,2021(3).)引用粒子群算法,对目标区域求解定位精度最高的最优布站;文献《optimal placement of base stations in falling point measurement atsea》(zhang z,sun a,zhang x,et al.optimal placement of base stations infalling point measurement at sea[c]//dalian maritime university,hong kongsociety of mechanical engineers(hksme).proceedings of 5th internationalconference on automation,control and robotics engineering(cacre 2020).ieeeexpress conference publishing,2020:5.)利用模拟退火算法进行布站优化,其结果不易陷入局部最优解。
4、但是,上述群智能算法都需要较长的计算时间和较高的计算成本。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于人工水母搜索算法的无人机群布阵优化方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明实施例提供了一种基于人工水母搜索算法的无人机群布阵优化方法,在空天地系统中,以低轨道卫星作为外部辐射源,并部署由无人机构成的无人机群作为接收节点,实现无人机群对空中目标的时差定位,针对这一应用背景,所述方法具体包括以下步骤:
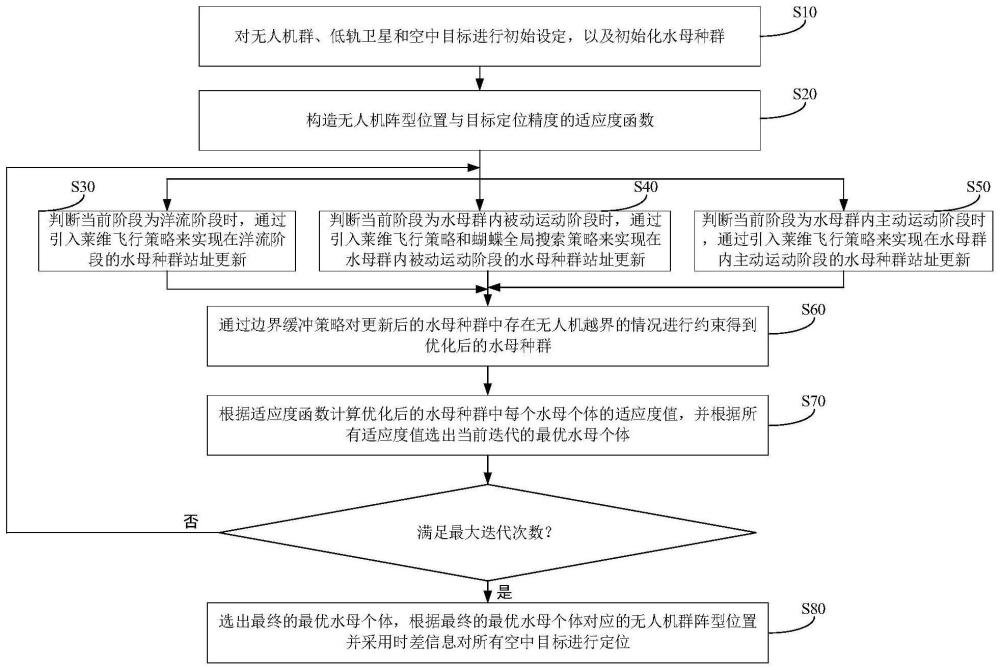
3、s10、对无人机群、低轨卫星和空中目标进行初始设定,以及初始化水母种群;
4、s20、构造无人机阵型位置与目标定位精度的适应度函数;
5、s30、判断当前阶段为洋流阶段时,通过引入莱维飞行策略来实现在洋流阶段的水母种群站址更新;
6、s40、判断当前阶段为水母群内被动运动阶段时,通过引入莱维飞行策略和蝴蝶全局搜索策略来实现在水母群内被动运动阶段的水母种群站址更新;
7、s50、判断当前阶段为水母群内主动运动阶段时,通过引入莱维飞行策略来实现在水母群内主动运动阶段的水母种群站址更新;
8、s60、通过边界缓冲策略对s30、s40、s50更新后的水母种群中存在无人机越界的情况进行约束得到优化后的水母种群;
9、s70、根据所述适应度函数计算优化后的水母种群中每个水母个体的适应度值,并根据所有适应度值选出当前迭代的最优水母个体;
10、s80、重复上述s30~s70过程,直至满足最大迭代次数,选出最终的最优水母个体,根据最终的最优水母个体对应的无人机群阵型位置并采用时差信息对所有空中目标进行定位。
11、在本发明的一个实施例中,s20中所构造的无人机阵型位置与目标定位精度的适应度函数公式表示为:
12、
13、其中,m表示目标区域存在的空中目标数目,trace(·)表示求迹操作,e[dx·dxt]表示空中目标的定位误差对应的协方差矩阵,f表示相关系数矩阵,(x,y,z)表示空中目标的位置信息,(xk,yk,zk)表示无人机k的位置信息,k=1~n,n表示无人机群中无人机数目,表示空中目标到低轨卫星的距离,表示无人机k到空中目标的距离,e[dv·dvt]表示无人机观测误差的协方差矩阵,表示每个无人机由于时差测量误差造成的距离测量误差方差,diag(·)表示求对角矩阵操作,(·)t表示求转置操作,(·)-1表示求逆操作,e[dxs·dxst]表示每个无人机布站误差的协方差矩阵,表示无人机站址测量误差的方差,blkdiag[·]表示生成以矩阵块为对角线的矩阵,表示无人机k到低轨卫星的距离。
14、在本发明的一个实施例中,s30中引入莱维飞行策略来实现在洋流阶段的水母种群站址更新公式表示为:
15、
16、其中,表示在洋流阶段第t+1次迭代水母种群中无人机i的位置信息,表示在洋流阶段第t次迭代水母种群中无人机i的位置信息,s表示通过引入的莱维飞行策略计算得到的随机步长,σv=1,表示在洋流阶段第t次迭代水母种群中最优水母个体对应无人机的位置信息,β2表示分布系数,表示在洋流阶段第t次迭代水母种群的平均位置信息,β表示一常数,「(·)表示伽马函数。
17、在本发明的一个实施例中,s40中的引入莱维飞行策略和蝴蝶全局搜索策略来实现在水母群内被动运动阶段的水母种群站址更新公式表示为:
18、
19、其中,表示在水母群内被动运动阶段第t+1次迭代水母种群中无人机i的位置信息,表示在水母群内被动运动阶段第t次迭代水母种群中无人机i的位置信息,γ表示运动系数,s表示通过引入的莱维飞行策略计算得到的随机步长,ub表示搜索空间的上界,lb表示搜索空间的下界,fi表示无人机i的发光点,c为感觉因子,f(·)表示适应度函数,α表示幂指数,g*表示全局最优解,全局最优解g*是在s10~s80实现过程中通过所述适应度函数计算的适应度值判断得到的。
20、在本发明的一个实施例中,s50中的引入莱维飞行策略来实现在水母群内主动运动阶段的水母种群站址更新公式表示为:
21、
22、其中,表示在水母群内被动运动阶段第t+1次迭代水母种群中无人机i的位置信息,表示在水母群内被动运动阶段第t次迭代水母种群中无人机i的位置信息表示第t次迭代时从水母种群中随机选择的无人机j的位置信息,表示第t次迭代时从水母种群中随机选择的无人机i的位置信息,f(·)表示适应度函数,s表示通过引入的莱维飞行策略计算得到的随机步长。
23、在本发明的一个实施例中,s60中通过边界缓冲策略对三个阶段存在无人机越界情况均进行约束公式表示为:
24、
25、其中,xi'表示约束后的无人机i的位置信息,xi表示约束前的无人机i的位置信息,当在洋流阶段时xi取值为当在水母群内被动运动阶段时xi取值为当在水母群内主动运动阶段时xi取值为ub表示搜索空间的上界,lb表示搜索空间的下界。
26、在本发明的一个实施例中,s30、s40、s50中判断当前阶段的方式,包括:
27、通过引入时间控制函数来判断当前阶段处于洋流阶段或水母群内被动运动阶段或水母群内主动运动阶段。
28、在本发明的一个实施例中,通过引入时间控制函数来判断当前阶段处于洋流阶段或水母群内被动运动阶段或水母群内被动运动阶段,包括:
29、利用时间控制函数计算第一控制时间,判断所述第一控制时间是否大于预设控制时间,若是,则判断当前阶段为洋流阶段,若不是,则随机生成一随机数,根据所述第一控制时间计算第二控制时间,判断所述随机数是否大于所述第二控制时间,若是,则判断当前阶段为水母群内被动运动阶段,若不是,则判断当前阶段为水母群内主动运动阶段。
30、本发明的有益效果:
31、本发明提出的基于人工水母搜索算法的无人机群布阵优化方法,在空天地系统中,以低轨道卫星作为外部辐射源,并部署由无人机构成的无人机群作为接收节点,实现无人机群对空中目标的时差定位,针对这一应用背景,该方法包括:对无人机群、低轨卫星和空中目标进行初始设定,以及初始化水母种群;构造无人机阵型位置与目标定位精度的适应度函数;判断当前阶段为洋流阶段时,通过引入莱维飞行策略来实现在洋流阶段的水母种群站址更新;判断当前阶段为水母群内被动运动阶段时,通过引入莱维飞行策略和蝴蝶全局搜索策略来实现在水母群内被动运动阶段的水母种群站址更新;判断当前阶段为水母群内主动运动阶段时,通过引入莱维飞行策略来实现在水母群内主动运动阶段的水母种群站址更新;通过边界缓冲策略对更新后的水母种群中存在无人机越界的情况进行约束得到优化后的水母种群;根据适应度函数计算优化后的水母种群中每个水母个体的适应度值,并根据所有适应度值选出当前迭代的最优水母个体;重复上述判断、更新、约束、选出过程,直至满足最大迭代次数,选出最终的最优水母个体,根据最终的最优水母个体对应的无人机群阵型位置并采用时差信息对所有空中目标进行定位。可见,本发明实施例运用的人工水母搜索算法框架新颖,算法收敛性快,效率高且不易陷入局部最优解,该方法有效解决了多无人机时差定位系统在目标定位时的最佳布站问题,特别针对空天地系统中,低轨发无人机收的时差定位系统的无人机群布阵优化问题,在不增加系统复杂度和成本的情况下,能够最快的求解无人机的最佳布站位置,提升无人机群对空中目标的定位精度,能够在动态情况下处理需快速布站定位的问题,在低轨卫星时差定位优化布站领域具有很好的适用性。
32、以下将结合附图及实施例对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!