基于逆物理信息神经网络的故障滚动轴承数字孪生模型构建方法
本发明属于轴承故障诊断,涉及一种基于逆物理信息神经网络的故障滚动轴承数字孪生模型构建方法。
背景技术:
1、随着航空发动机、机床、火车、风力涡轮机等现代工业设备的发展,对其关键部件的要求越来越高。滚动轴承作为关键部件之一,随着设备性能的提高,需要以更高的速度工作,承受更大的载荷。由于恶劣的工作条件,滚动轴承容易发生故障,可能导致整个设备停机,甚至发生重大事故。因此,监测滚动轴承的健康状态并诊断其故障非常重要。现有的轴承故障诊断方法主要可分为基于信号处理的方法和基于人工智能的方法,然而这些故障诊断的方法通常需要大量的故障样本。基于数字孪生的样本增广技术将基于模型的方法与数据驱动的方法相结合,得到了越来越广泛的应用。该方法仅需少量实际信号即可生成故障样本,大大节省了实验成本,提出了增强轴承振动数据的方法。piltan等人将机理模型与自适应观测器相结合,构建了振动数字孪生模型,以准确识别轴承裂纹尺寸。为了阐明滚动轴承全生命周期的振动响应,qin等人开发了全生命周期滚动轴承数据模型联合驱动数字孪生模型。
2、为了将物理模型与神经网络相结合,各种基于物理信息的神经网络(physics-informed neural networks,pinn)被提出,其中一些已成功应用于滚动轴承的故障预测与诊断。例如,chen等人提出了一种物理信息退化一致性循环神经网络(physicalinformation-degeneration consistency recurrent neural network)用于剩余寿命预测,将机械零件的自然退化知识融入到神经网络中。yuucesan等基于物理信息建立了风电机组主轴承疲劳建模销轴。然而,这些方法主要利用物理信息来解决其关注的问题,如rul预测,而不是求解物理模型。因此,一些pinn被提出用于解决各种物理模型。然而,由于两自由度轴承动力学模型的微分方程相互耦合,现有的pinn不能用于计算轴承的振动响应。因此,对故障滚动轴承进行动态建模的pinn的改进是值得探索的。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于逆物理信息神经网络的故障滚动轴承数字孪生模型构建方法,用于不平衡故障诊断中改善数据样本中正常样本多于故障样本的失衡问题。
2、为达到上述目的,本发明提供如下技术方案:
3、一种基于逆物理信息神经网络的故障滚动轴承数字孪生模型构建方法,具体包括以下步骤:
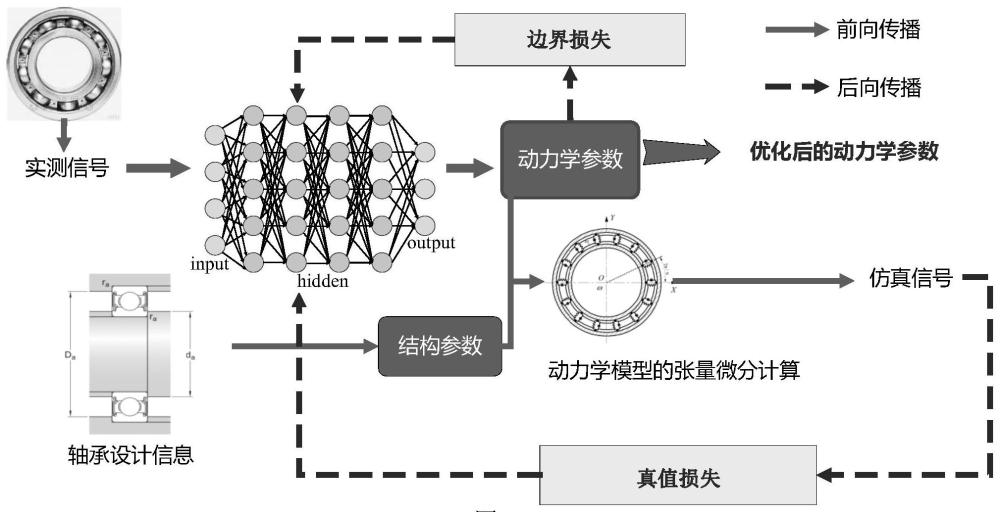
4、s1:输入故障滚动轴承的结构参数,将从实际物理空间中采集到的实测振动信号输入到逆物理信息神经网络中;通过专家经验设置两个动态参数的取值范围,然后在这两个范围内分别初始化两个动态参数;
5、s2:构建故障滚动轴承动力学模型,根据故障滚动轴承的结构参数、工况和动力学参数,采用四阶龙格库塔算法和张量计算求解故障滚动轴承的二自由度动力学方程,得到仿真振动信号;
6、s3:对仿真振动信号和实测信号进行傅里叶变换,得到两种信号的频域样本;同时,通过逆物理信息神经网络计算从实测信号样本得出的动力学参数;
7、s4:采用边界损失和真值损失函数进行总体损失函数的计算,对逆物理信息神经网络进行训练直到收敛;
8、s5:通过物理信息神经网络得到故障滚动轴承的动力学参数精确解,将其输入到故障滚动轴承动力学模型中计算获取不同工况和故障状态下的振动响应;
9、s6:使用获取的生成样本完成故障诊断数据集样本的扩充。
10、进一步,步骤s2中,构建故障滚动轴承动力学模型,具体为:将故障简化为长宽高分别为l、b、h的二自由度动力学模型,其中,长l的方向平行于滚动体的滚动方向;根据故障的尺寸信息和轴承的参数,可以将故障引起的最大位移激励δh表示为:
11、
12、δh′=0.5d-((0.5d)2-(0.5min(l,b))2)0.5 (2)
13、其中,d表示滚动体的直径,δh′表示理论上能达到的最大故障位移激励值;
14、通过半三角函数的形式来表示故障滚动轴承在转动过程中的激励函数,具体的位移激励函数可以表示为:
15、
16、其中,表示滚动体进入故障区域时和x轴的夹角,表示滚动体进入故障区域时和x轴的夹角,θj表示第j个滚动体的角位置;
17、滚动体与滚道之间接触的法向变形包括轴承故障位移激励函数的影响,具体的接触变形表达式可以表示为:
18、δj=δxcosθj+δy sinθj-ε-hj (4)
19、其中,δx和δy分别表示滚动轴承在x、y方向上的振动位移,ε为轴承的公差;
20、故障滚动轴承的二自由度动力学方程可以表示为:
21、
22、其中,m表示轴承质量,k表示轴承的等效刚度,c表示轴承的等效阻尼系数,nb表示轴承滚动体数目,wx、wy分别表示轴承在两个方向上的载荷;μj表示第j个滚动体在接触区域的判断系数,定义为:
23、
24、通过四阶龙格库塔法即可获取滚动轴承不同部件的理论振动响应。
25、进一步,步骤s4中,所述边界损失的作用是限定动力学参数的初始化和优化范围,加快逆物理信息神经网络的训练速度,定义如下:
26、
27、
28、其中,lossb表示边界损失,pipre表示逆物理信息神经网络所输出的第i个动力学参数;pimin和pimax是第i个动力学参数的求解下限和上限;n表示动力学参数的总数;在本发明中,有两个动态参数,包括轴承刚度k和阻尼系数c,具体的上下限可以根据两个参数的取值范围设定。
29、进一步,步骤s4中,所述真值损失是实测振动信号与模拟振动信号的频域变换结果之间的均方根误差,定义如下:
30、
31、其中,lossr表示真值损失,x、y为实测振动信号在x、y方向上的傅里叶变换结果;和为逆物理信息神经网络所得出的动力学参数,对应的模拟振动信号的傅里叶变换结果;real(·)和imag(·)分别表示数据的实部和虚部;n表示样本数据点数。
32、进一步,步骤s4中,总体损失函数为
33、loss=lossb+lossr (10)
34、其中,lossb表示边界损失,lossr表示真值损失。
35、本发明的有益效果在于:本发明能够准确求解出当前只能通过专家经验大致估计的轴承动力学参数,提高动力学模型的准确性和可靠性,同时完成故障样本的跨工况生成,有效改善数据样本中正常样本多于故障样本的失衡问题,同时极大地减少实际实验的需求,减少样本获取的时间和经济成本,提高研究和经济生产的效率。
36、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!