一种自动驾驶汽车的危险场景行驶风险度评估系统及方法
本发明涉及一种道路安全风险度评估系统,特别是涉及一种自动驾驶汽车的危险场景行驶风险度评估系统及方法,属于道路安全风险度评估系统。
背景技术:
1、随着公路路网的基本建成,步入了公路养护维修高潮期,路面的老化、路基沉降、局部坑洼、路面裂缝、坑槽以及壅包等问题逐渐显现出来,不同程度地影响着车辆的行车安全、通行效率和行车舒适度等,已有的路面病害也在进一步加剧着路面的恶化导致自动驾驶汽车道路安全风险比较高。
2、常见的路面检测工作由人工走查、半自动检测车、全自动检测车完成,然而在人工走查过程中,每名检查员每天只能完成10km左右检测量,因此需要消耗大量的时间进行卫华和保养,无法应对大规模巡查工作,其缺点病害定位精度低,主观判定容易出现错判漏判,不利于大范围推广应用。
3、因此,亟需对自动驾驶汽车的道路安全风险度评估系统及方法进行改进,以解决上述存在的问题。
技术实现思路
1、本发明的目的是提供一种自动驾驶汽车的危险场景行驶风险度评估系统及方法,本系统能够建立一套高效、灵活、准确,既能人机交互式运行又能规划检修检修情况的辅助设计系统,对采集的信息数据进行处理,同时建立养护决策数据库,对不同的信息数据形成不同的养护规划方案,再进行方案比选,确定最终的养护规划方案,大大提升对公路的养护效率。
2、为了达到上述目的,本发明采用的主要技术方案包括:
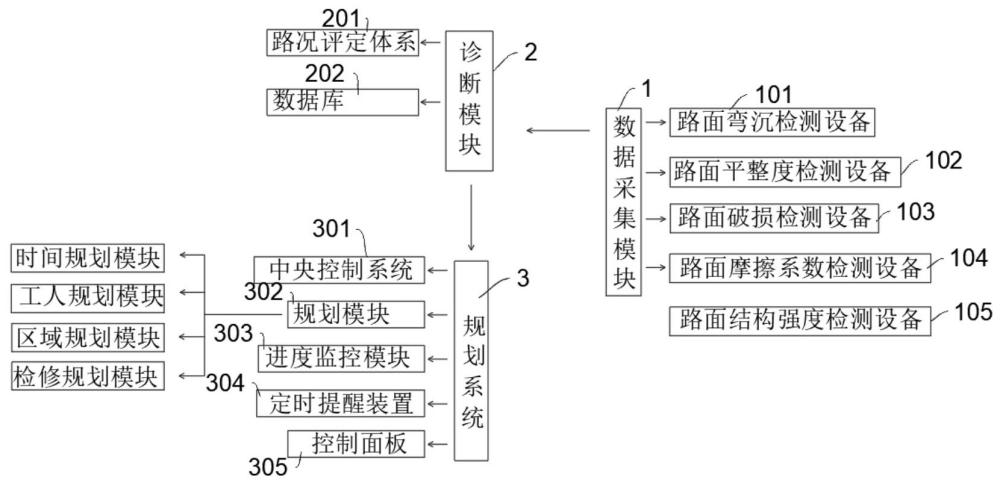
3、数据采集模块,所述数据采集模块包括路面弯沉检测设备、路面平整度检测设备、路面破损检测设备、路面摩擦系数检测设备以及路面结构强度检测设备,所述数据采集模块用于检测路面的破损情况;
4、诊断模块,所述诊断模块包括路况评定体系以及数据库,以及;
5、规划系统,所述规划系统包括中央控制系统、规划模块、进度监控模块以及定时提醒装置,所述规划模块包括时间规划模块、工人规划模块、区域规划模块以及检修规划模块;
6、所述数据采集模块对路面进行检测,并将采集的数据导入所述诊断模块,所述路况评定体系对路面状况采集的数据进行对比分析,通过所述规划系统规划处出路面病害形式和区域,并将路面病害形式和区域数据传输至所述中央控制系统,由所述中央控制系统结合所述数据库调动附近的工人确定检修对策,其中所述中央控制系统采用预测模型方程进行预测并确定保养时机;
7、所述保养时机具体为:
8、所述路面结构强度检测设备检测的路面强度不能满足交通主管部门行业要求及业主要求时需采取大修养护措施以提高其承载能力,大修决策时机为pssi评分接近80分时;
9、在强度满足要求的前提下,路面损坏状况指数pci或路面行驶质量指数rqi不能满足交通主管部门行业要求和业主要求时,中修决策时机为pci或rqi评分接近85分时;
10、抗滑能力不足的路段,采取加铺抗滑磨耗层等措施来提高路表面的抗滑能力,决策时机为sri<75;
11、车辙严重路段,采取挖除或切削或铣刨原有车辙,再加铺kac沥青混合料或sma等措施来修补车辙,决策时机为rdi<75;
12、在路面损坏状况指数pci或路面行驶质量指数rqi评价宜为优的时候采取预防性养护措施来修复路面初期病害,延缓道路使用性能的衰减,提高道路的耐久性,预防性养护决策时机为pci或rqi≥90分时。
13、优选的,所述中央控制系统上通信连接有控制面板,使用者通过所述控制面板输入信息,选择所需的所述规划模块,通过所述中央控制系统整合信息,输出具体事项规划,通过所述进度监控模块,定时提醒用户该时间应该完成和应该开始的事项;
14、所述规划模块用来选择具体的检修工人以及确定的检修时间。
15、优选的,所述路面弯沉检测设备用于检测路面损坏指数,并用pci进行评价,其公式如下:
16、pci = 100-a0dra1;
17、dr = 100× ;
18、其中,式中dr为各种损坏的折合损坏面积之和与路面调查面积之百分比:
19、ai为第i类路面损坏的面积m2;
20、a为调查的路面面积m2;
21、wi为第i类路面损坏的权重;
22、a0为路面损坏状况系数采用15.00;
23、a1为路面损坏状况系数采用0.412;
24、i为考虑损坏程度的第i项路面损坏类型;
25、i0为包含损坏程度的损坏类型总数。
26、优选的,所述路面平整度检测设备用于检测路面的平整度,并用平整度指数rqi进行评价,其公式如下:
27、rqi = ;
28、其中,式中iri为国际平整度指数m/km;
29、a0为高速公路采用系数,采用数值为0.026;
30、a1为高速公路采用系数,采用数值为0.65。
31、路面车辙深度指数rdi路面车辙用路面车辙深度指数rdi评价,其公式如下;
32、rdi = ;
33、其中,式中 rd为车辙深度(mm);
34、rda为车辙深度参数,采用20mm;
35、rdb为车辙深度参数,采用35mm;
36、a0为模型参数,采用2.0;
37、a1为模型参数,采用4.0。
38、优选的,所述路面摩擦系数检测设备用于检测路面的抗滑性能,并用抗滑指数pssi评价,其公式如下;
39、pssi =;
40、其中,式中sfc为横向力系数;
41、srimin为标定参数,采用35.0;
42、a0为模型参数,采用28.6;
43、a1为模型参数,采用-0.105。
44、优选的,所述路面结构强度检测设备用于检测路面的结构强度,并用强度指数pssi评价,其公式如下;
45、pssi = ;
46、ssi = ;
47、其中,式中ssi为路面结构强度系数,为路面设计弯沉与实测代表弯沉之比;
48、ld为路面设计弯沉(mm);
49、l0为实测代表弯沉(mm);
50、a0为模型参数,采用15.71;
51、a1为模型参数,采用-5.19。
52、优选的,所述预测模型方程具体如下:
53、ppi=ppi0{1-exp[-(a/y)b]};
54、其中,式中ppi为使用性能指数pci、rqi或其综合;
55、ppi0为初始使用性能指数,一般情况下取100;
56、y为路龄;
57、a、b为模型参数;
58、其中,a包括交通轴载,结构强度,面层厚度,基层类型,环境状况,材料类型;
59、b包括交通轴载,结构强度,面层厚度,基层类型,环境状况,材料类型。
60、优选的,所述规划系统还包括系统管理中央控制系统,系统管理包括用户管理中央控制系统、日志管理规划模块和数据备份进度监控模块。
61、优选的,所述路面破损检测设备用于识别路面颠簸点、评估道路平整度等级、计算视频摄像头的照片截取时间、基于图像识别分析颠簸点的病害类型。
62、一种自动驾驶汽车的危险场景行驶风险度评估系统及方法的模型和算法,包括以下步骤:
63、步骤一:通过数据采集模块上的路面弯沉检测设备、路面平整度检测设备、路面破损检测设备、路面摩擦系数检测设备和所述路面结构强度检测设备对路面进行检测;
64、步骤二:基于可靠路面状态数据采集方法,将数据采集模块将采集信息上传至规划系统并根据规划系统上的进度监控模块对路面状况进行监控;
65、步骤三;将步骤一中的所述数据采集模块检测的信息传输至步骤二中所述规划系统上的所述中央控制系统;
66、步骤四:步骤三中中央控制系统将数据信息传输至所述规划模块并启动规划模块;
67、步骤五:通过所述规划模块上的时间规划模块、工人规划模块、区域规划模块以及检修规划模块对路面进行维修即可。
68、本发明至少具备以下有益效果:
69、本系统能够建立一套高效、灵活、准确,既能人机交互式运行又能规划检修检修情况的辅助设计系统,对采集的信息数据进行处理,同时建立养护决策数据库,对不同的信息数据形成不同的养护规划方案,再进行方案比选,确定最终的养护规划方案,大大提升对公路的养护效率。
- 还没有人留言评论。精彩留言会获得点赞!