一种汽车全景影像标定方法、装置、设备、介质及车辆与流程
本发明涉及汽车全景影像,尤其涉及一种汽车全景影像标定方法、装置、设备、介质及车辆。
背景技术:
1、随着智能汽车的发展,360全景影像在整车配置率越来越高,软件迭代和售后维修都会需要对360全景影像进行参数标定,以达到车辆影像效果佳的目的。传统的标定方法需要固定的黑白格标定幕布或黑白格固定场地,需要顾客到含有黑白格标定幕布或黑白格固定场地的4s店进行标定,这样不仅增加了4s店的场地成本,也增加了用户的标定成本,并且用户不能随时随地进行标定。
技术实现思路
1、鉴于以上现有技术的缺陷,本发明提供一种汽车全景影像标定方法、装置、设备、介质及车辆,以解决标定成本高且不及时的技术问题。
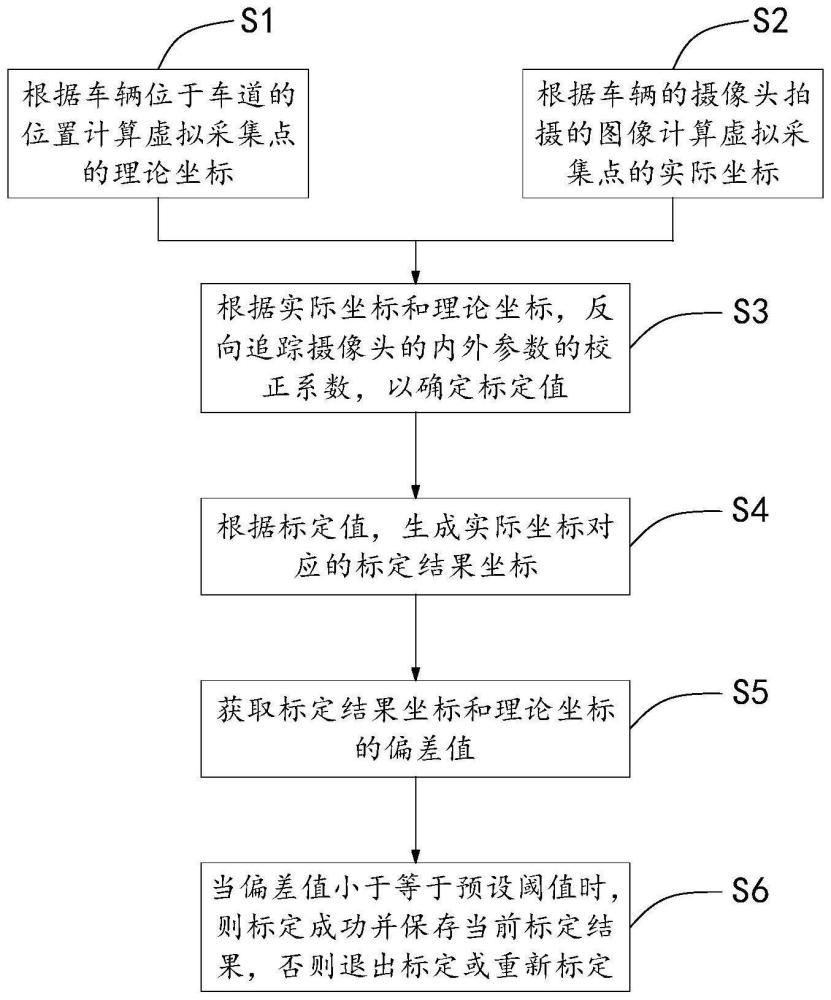
2、为实现上述目的及其它相关目的,本发明提供了一种汽车全景影像标定方法,包括如下步骤:根据车辆位于车道的位置计算虚拟采集点的理论坐标;根据所述车辆的摄像头拍摄的图像计算所述虚拟采集点的实际坐标;根据所述实际坐标和所述理论坐标,反向追踪所述摄像头的内外参数的校正系数,以确定标定值。
3、于本发明一实施例中,还包括:根据所述标定值,生成所述实际坐标对应的标定结果坐标;获取所述标定结果坐标和所述理论坐标的偏差值;当所述偏差值小于等于预设阈值时,则标定成功并保存当前标定结果,否则退出标定或重新标定。
4、于本发明一实施例中,所述根据车辆位于车道的位置计算虚拟采集点的理论坐标的步骤前还包括:根据用户的道路环境信息确定标定模式;根据所述标定模式确定所述虚拟采集点。
5、于本发明一实施例中,所述道路环境信息包括环境亮度以及车道线的清晰度、弯曲度、完整度;所述标定模式包括一级标定模式和二级标定模式,所述一级标定模式下所述虚拟采集点的数量多于所述二级标定模式下所述虚拟采集点的数量,所述一级标定模式下所述预设阈值小于所述第二标定模式下所述预设阈值。
6、于本发明一实施例中,所述根据车辆位于车道的位置计算虚拟采集点的理论坐标的步骤前包括如下步骤:当接收到用户发出的标定权限申请指令时,对用户身份进行校验,并在校验成功后解锁道路标定权限;当接收到用户发出的标定启动指令时,启动并进入标定程序。
7、于本发明一实施例中,所述虚拟采集点通过如下步骤构建:根据摄像头和车道线的位置关系确定直线,所述直线包括连接左右摄像头的第一直线、摄像头的镜头中心线、车道线的任一侧线或中心线、平行于车道线的中心线且位于摄像头和车道线的中间位置的第二直线、与摄像头间隔设定距离且与该摄像头的镜头中心线形成设定角度的第三直线、经过摄像头并与摄像头的镜头中心线形成设定角度的第四直线;根据所述直线的相交位置,获得所述虚拟采集点的一类点;根据所述一类点相对于所述直线的镜像位置,获得所述虚拟采集点的二类点。
8、于本发明一实施例中,所述根据所述直线的相交位置,获得所述虚拟采集点的一类点的步骤包括:根据所述车辆左侧或右侧的摄像头的镜头中心线与该侧所述第二直线的相交位置,获得a点;根据所述摄像头的镜头中心线与该侧车道的中心线的相交位置,获得b点。
9、于本发明一实施例中,所述根据所述一类点相对于所述直线的镜像位置,获得所述虚拟采集点的二类点的步骤包括:根据所述b点相对于所述第一直线的镜像位置,获得b’点;根据所述a点相对于该侧车道的中心线的镜像位置,获得a’点;根据所述a点相对于所述第一直线的镜像位置,获得a”点。
10、于本发明一实施例中,所述根据所述直线的相交位置,获得所述虚拟采集点的一类点的步骤包括:根据所述车辆前端或后端的摄像头的镜头中心线与所述第三直线的相交位置,获得e点;根据所述第三直线与所述第四直线的相交位置,获得f点和g点,其中所述f点对应的所述设定角度为β,所述g点对应的所述设定角度为-β。
11、为实现上述目的及其它相关目的,本发明还提供了一种汽车全景影像标定装置,所述装置包括:第一坐标计算模块,用于根据车辆位于车道的位置计算虚拟采集点的理论坐标;第二坐标计算模块,用于根据所述车辆的摄像头拍摄的图像计算所述虚拟采集点的实际坐标;标定值计算模块,用于根据所述实际坐标和所述理论坐标,反向追踪所述摄像头的内外参数的校正系数,以确定标定值。
12、为实现上述目的及其它相关目的,本发明还提供了一种电子设备,包括处理器、存储器和通信总线;所述通信总线用于将所述处理器和存储器连接;所述处理器用于执行所述存储器中存储的计算机程序,以实现如上述中任一项实施例提供的方法。
13、为实现上述目的及其它相关目的,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序用于使计算机执行如上述任一项实施例提供的方法。
14、为实现上述目的及其它相关目的,本发明还提供了一种车辆,所述车辆安按照如上任一项实施例提供的方法进行汽车全景影像标定。
15、本发明的有益效果:本发明提出的一种汽车全景影像标定方法、装置、设备、介质及车辆,该方法利用道路自然环境即车道线来获取虚拟采集点的理论坐标和实际坐标,并根据这两个坐标计算标定值,无需用到黑白格标定幕布或黑白格固定场地,只要找到一处标准车道即可实现汽车全景影像的标定,车道线非常常见,这样就可以做到随时随地进行标定,不受时间和空间的限制,标定起来更加方便。
技术特征:
1.一种汽车全景影像标定方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的汽车全景影像标定方法,其特征在于,还包括:
3.根据权利要求2所述的汽车全景影像标定方法,其特征在于,所述根据车辆位于车道的位置计算虚拟采集点的理论坐标的步骤前还包括:
4.根据权利要求3所述的汽车全景影像标定方法,其特征在于,所述道路环境信息包括环境亮度以及车道线的清晰度、弯曲度、完整度;所述标定模式包括一级标定模式和二级标定模式,所述一级标定模式下所述虚拟采集点的数量多于所述二级标定模式下所述虚拟采集点的数量,所述一级标定模式下所述预设阈值小于所述第二标定模式下所述预设阈值。
5.根据权利要求1所述的汽车全景影像标定方法,其特征在于,所述根据车辆位于车道的位置计算虚拟采集点的理论坐标的步骤前包括如下步骤:
6.根据权利要求1所述的汽车全景影像标定方法,其特征在于,所述虚拟采集点通过如下步骤构建:
7.根据权利要求6所述的汽车全景影像标定方法,其特征在于,所述根据所述直线的相交位置,获得所述虚拟采集点的一类点的步骤包括:
8.根据权利要求7所述的汽车全景影像标定方法,其特征在于,所述根据所述一类点相对于所述直线的镜像位置,获得所述虚拟采集点的二类点的步骤包括:
9.根据权利要求6所述的汽车全景影像标定方法,其特征在于,所述根据所述直线的相交位置,获得所述虚拟采集点的一类点的步骤包括:
10.一种汽车全景影像标定装置,其特征在于,包括:
11.一种电子设备,其特征在于,包括处理器、存储器和通信总线;所述通信总线用于将所述处理器和存储器连接;所述处理器用于执行所述存储器中存储的计算机程序,以实现如权利要求1~9任一项所述的方法。
12.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序用于使计算机执行如权利要求1~9任一项所述的方法。
13.一种车辆,其特征在于,所述车辆按如权利要求1~9任一项所述的方法进行汽车全景影像标定。
技术总结
本发明提供一种汽车全景影像标定方法、装置、设备、介质及车辆,其中标定方法包括如下步骤:根据车辆位于车道的位置计算虚拟采集点的理论坐标;根据车辆的摄像头拍摄的图像计算虚拟采集点的实际坐标;根据实际坐标和理论坐标,反向追踪摄像头的内外参数的校正系数,以确定标定值。该方法利用道路自然环境即车道线来获取虚拟采集点的理论坐标和实际坐标,并根据这两个坐标计算标定值,无需用到黑白格标定幕布或黑白格固定场地,只要找到一处标准车道即可实现汽车全景影像的标定,车道线非常常见,这样就可以做到随时随地进行标定,不受时间和空间的限制,标定起来更加方便。
技术研发人员:杨福,刘春勇,崔志新
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!