一种无人机公路巡检过程中公路桩号确定方法及装置与流程
本发明属于无人机公路巡检,具体涉及一种无人机公路巡检过程中公路桩号确定方法及装置。
背景技术:
1、随着我国基础建设的愈加完善,公路里数随之增加,公路上通常设置有公路桩号,也称为道路桩号,是指在公路或道路上设置的一系列桩标号码,用于表示路线的位置和方位。
2、现如今公路数量繁多,针对公路巡检的通常是人工或者无人机巡检拍摄路面,用于检测路面是否完善或者是否存在紧急事故,并通过人工当前或者无人机当前的经纬度信息报备位置信息,但是某些情况下巡检位置对应的公路桩号,但是现有技术中并无有效解决方案。
3、因此,如何在公路巡检过程中确定巡检位置对应的公路桩号,方便公路养护人员快速定位巡检点,并对巡检点养护,是本领域技术人员有待解决的技术问题。
技术实现思路
1、本发明的目的是为了解决现有技术中无法在无人机公路巡检过程中确定对应的公路桩号的技术问题。
2、为实现上述技术目的,一方面,本发明提供了一种无人机公路巡检过程中公路桩号确定方法,该方法包括:
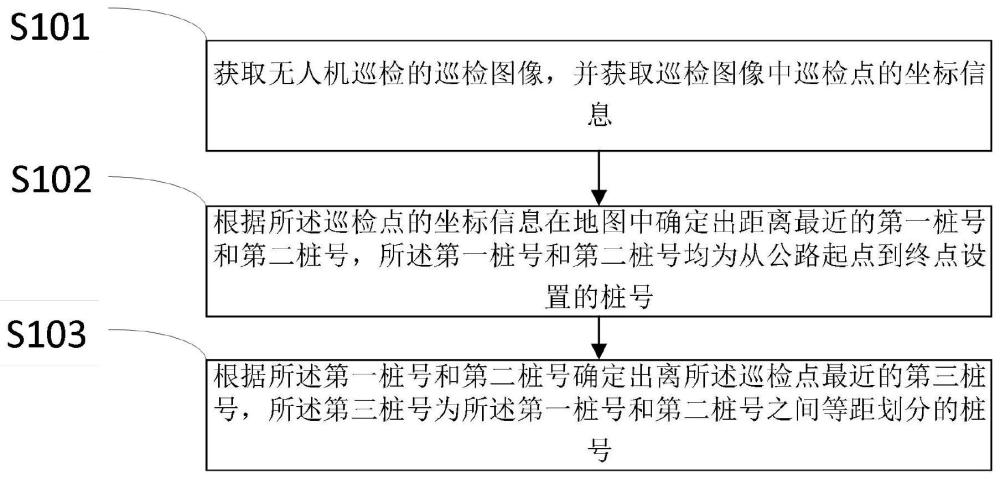
3、获取无人机巡检的巡检图像,并获取巡检图像中巡检点的坐标信息;
4、根据所述巡检点的坐标信息在地图中确定出距离最近的第一桩号和第二桩号,所述第一桩号和第二桩号均为从公路起点到终点设置的桩号;
5、根据所述第一桩号和第二桩号确定出离所述巡检点最近的第三桩号,所述第三桩号为所述第一桩号和第二桩号之间等距划分的桩号。
6、进一步地,所述获取无人机巡检的巡检图像,并获取巡检图像中巡检点的坐标信息,具体包括:
7、根据所述巡检图像,确定所述无人机与公路的位置关系;
8、根据所述位置关系、无人机高度和三角函数确定所述坐标信息。
9、进一步地,所述位置关系包括所述无人机垂直于所述公路正上方,或所述无人机位于所述公路侧上方。
10、进一步地,当所述位置关系为所述无人机垂直于所述公路正上方时,所述坐标信息的确定过程包括:
11、将所述无人机高度作为三角形的第一直角边,所述无人机垂直于公路的点作为所述三角形的直角顶点;
12、确定所述无人机拍摄方向与所述第一直角边的第一角度,并以此进行延伸至巡检点作为所述三角形的斜边,拍摄点与所述直角顶点之间的连线作为第二直角边后得到待计算三角形;
13、基于所述三角函数、待计算三角形和无人机坐标确定出巡检点的坐标信息。
14、进一步地,当所述位置关系为所述无人机位于所述公路侧上方时,所述坐标信息的确定过程包括:
15、基于所述无人机垂直于所述公路地面的点和最短路径搜索方法在地图中确定出距离最近的第四桩号和第五桩号,所述第四桩号和第五桩号均为从公路起点到终点设置的桩号;
16、根据所述第四桩号和第五桩号的坐标信息以及所述无人机垂直于所述公路地面的点的坐标信息,确定出该点垂直于第四桩号和第五桩号连线的垂直点的坐标信息以及垂直线的长度;
17、根据所述垂直点的坐标信息、垂直线的长度、所述无人机的位置信息、所述无人机高度、所述无人机的拍摄角度、所述无人机垂直于所述公路地面的点的坐标信息建立两个三角形后根据三角函数确定出巡检点的坐标信息。
18、进一步地,所述根据所述巡检点的坐标信息确定出距离最近第一桩号和第二桩号,具体为根据所述巡检点的坐标信息在地图上通过最短路径搜索方法确定出第一桩号和第二桩号。
19、进一步地,所述根据所述第一桩号和第二桩号确定离所述巡检点最近的第三桩号,具体包括:
20、确定出所述第一桩号和第二桩号的坐标信息;
21、根据所述第一桩号和第二桩号的坐标信息以及巡检点的坐标信息确定出巡检点在第一桩号和第二桩号之间的比例位置;
22、根据所述比例位置和第一桩号到第二桩号之间的距离确定出离所述巡检点最近的第三桩号。
23、另一方面,本发明还提供了一种无人机公路巡检过程中公路桩号确定装置,所述装置包括:
24、获取模块,获取无人机巡检的巡检图像,并获取巡检图像中巡检点的坐标信息;
25、第一确定模块,用于根据所述巡检点的坐标信息在地图中确定出距离最近的第一桩号和第二桩号,所述第一桩号和第二桩号均为从公路起点到终点设置的桩号;
26、第二确定模块,用于根据所述第一桩号和第二桩号确定出离所述巡检点最近的第三桩号,所述第三桩号为所述第一桩号和第二桩号之间等距划分的桩号。
27、本发明提供的一种无人机公路巡检过程中公路桩号确定方法及装置,与现有技术相比,本方法先获取无人机巡检的巡检图像,并获取巡检图像中巡检点的坐标信息;然后根据所述巡检点的坐标信息在地图中确定出距离最近的第一桩号和第二桩号,所述第一桩号和第二桩号均为从公路起点到终点设置的桩号;最后根据所述第一桩号和第二桩号确定出离所述巡检点最近的第三桩号,所述第三桩号为所述第一桩号和第二桩号之间等距划分的桩号。能够有效在无人机公路巡检的过程中确定巡检位置对应的公路桩号,能够更加方便地帮助公路养护人员快速定位巡检点。
技术特征:
1.一种无人机公路巡检过程中公路桩号确定方法,其特征在于,所述方法包括:
2.如权利要求1所述的无人机公路巡检过程中公路桩号确定方法,其特征在于,所述获取无人机巡检的巡检图像,并获取巡检图像中巡检点的坐标信息,具体包括:
3.如权利要求2所述的无人机公路巡检过程中公路桩号确定方法,其特征在于,所述位置关系包括所述无人机垂直于所述公路正上方,或所述无人机位于所述公路侧上方。
4.如权利要求3所述的无人机公路巡检过程中公路桩号确定方法,其特征在于,当所述位置关系为所述无人机垂直于所述公路正上方时,所述坐标信息的确定过程包括:
5.如权利要求3所述的无人机公路巡检过程中公路桩号确定方法,其特征在于,当所述位置关系为所述无人机位于所述公路侧上方时,所述坐标信息的确定过程包括:
6.如权利要求1所述的无人机公路巡检过程中公路桩号确定方法,其特征在于,所述根据所述巡检点的坐标信息确定出距离最近第一桩号和第二桩号,具体为根据所述巡检点的坐标信息在地图上通过最短路径搜索方法确定出第一桩号和第二桩号。
7.如权利要求1所述的无人机公路巡检过程中公路桩号确定方法,其特征在于,所述根据所述第一桩号和第二桩号确定离所述巡检点最近的第三桩号,具体包括:
8.一种无人机公路巡检过程中公路桩号确定装置,其特征在于,所述装置包括:
技术总结
本发明公开了一种无人机公路巡检过程中公路桩号确定方法及装置,该方法包括:先获取无人机巡检的巡检图像,并获取巡检图像中巡检点的坐标信息;然后根据所述巡检点的坐标信息在地图中确定出距离最近的第一桩号和第二桩号,所述第一桩号和第二桩号均为从公路起点到终点设置的桩号;最后根据所述第一桩号和第二桩号确定出离所述巡检点最近的第三桩号,所述第三桩号为所述第一桩号和第二桩号之间等距划分的桩号。能够有效在公路巡检过程中确定巡检位置对应的公路桩号,能够更加方便地帮助公路养护人员快速定位巡检点。
技术研发人员:夏宗权,吴向阳
受保护的技术使用者:洲际联合超伦科技(北京)有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!