用于超宽带室内定位的数据筛选方法
本发明属于室内定位,涉及一种用于超宽带室内定位的数据筛选方法。
背景技术:
1、近年来,室内定位逐渐引起学界和业界的关注,人们日益增长的定位服务需求也促使该领域的兴起,超市自动导购、停车场自动寻路、机器人自动分拣快递、工厂监狱等特殊场所的人员管理等等都离不开高精度的室内定位服务。目前,针对室内目标的定位计算包括红外线定位技术、rfid技术等。但现有的室内定位技术尽管在一定的环境下有较好的性能,却都不能很好地适应普遍计算环境下对定位感知系统的要求,如精度高、适应能力强、实现成本低等。
2、与传统的室内定位技术相比,超宽带uwb定位技术可以实现厘米级的测距精度,因其具有多径分辨率高、强穿透力、低功耗、易于集成、定位性能高等优势,成为目前应用最广泛的一项无线通信技术。但在uwb定位系统中,由于室内环境的复杂性和各种噪声干扰,标签与基站之间的通信往往会受到不可预知的干扰,例如多径干扰、非视距误差和传输延迟等问题。这些干扰可能导致标签从基站获取的超宽带数据不准确,尤其是对于处于干扰情况下的数据,该数据与其他的数据进行定位可能产生异常结果,从而影响定位结果的精度。
技术实现思路
1、本发明的目的,是要提供一种用于超宽带室内定位的数据筛选方法,通过对非视距数据对应的rssi数据进行径向基函数插值,然后通过非线性高斯过程回归模型进行高斯过程回归,除去其中最小的rssi数据所对应的超宽带数据得到筛选后的超宽带数据,然后和视距状态数据为视距数据时得到的超宽带数据一同通过超宽带定位模型解算位置坐标,完成定位,提高了定位精度。
2、本发明为实现上述目的,所采用的技术方案如下:
3、一种用于超宽带室内定位的数据筛选方法,包括以下步骤:
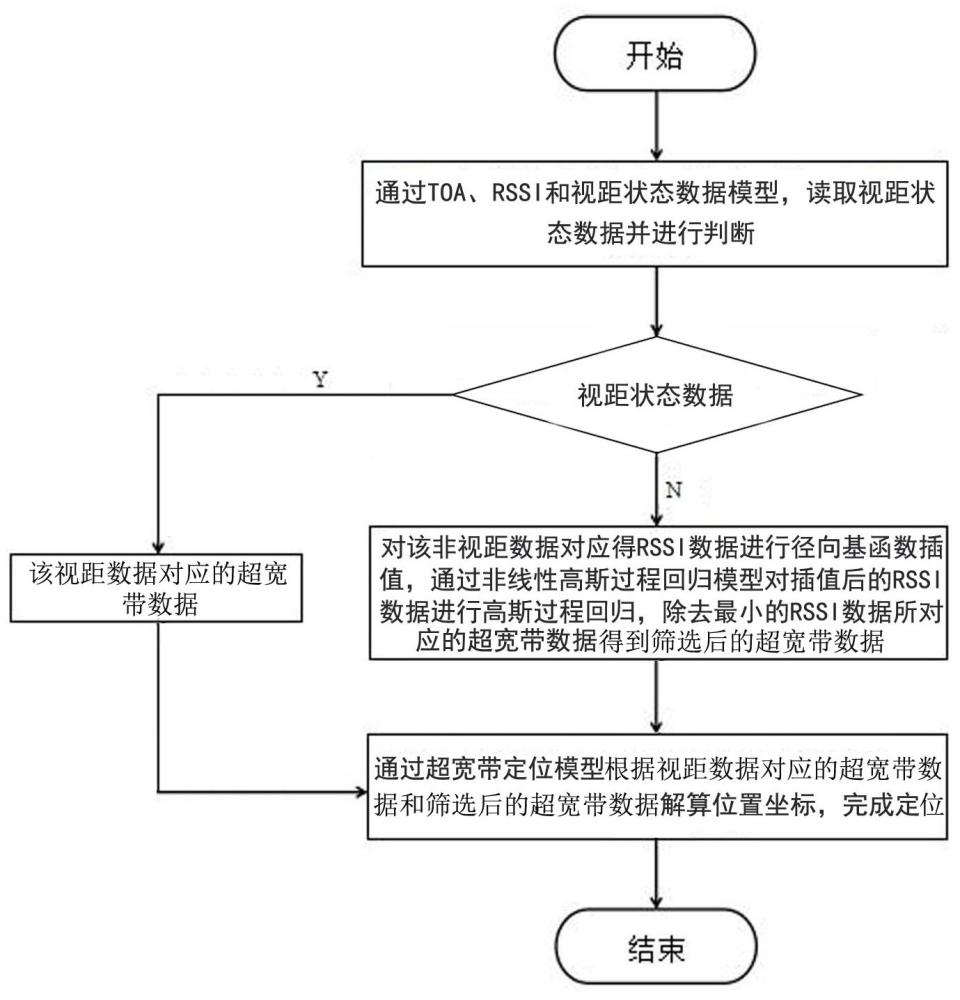
4、s1、建立toa、rssi和视距状态数据模型,读取视距状态数据并进行判断;并建立非线性高斯过程回归模型以及超宽带定位模型;
5、s2、通过toa、rssi和视距状态数据模型读取视距状态数据,并对视距状态数据进行判断,若视距状态数据为非视距数据,则对该非视距数据对应的rssi数据进行径向基函数插值得到插值后的rssi数据,然后通过非线性高斯过程回归模型对插值后的rssi数据进行高斯过程回归得到高斯回归后的rssi数据,最后对高斯回归后的rssi数据进行判断,除去其中最小的rssi数据所对应的超宽带数据得到筛选后的超宽带数据;
6、若视距状态数据为视距数据,则直接得到该视距数据对应的超宽带数据,将该视距数据对应的超宽带数据和筛选后的超宽带数据一同通过超宽带定位模型解算位置坐标,完成定位。
7、作为限定,步骤s1中,建立toa、rssi和视距状态数据模型的具体过程为:
8、(一)建立toa模型
9、获取无线电信号在移动标签与定位基站之间的传播时间,并乘以无线电信号的传播速率,得到定位基站与移动标签的toa测距值;将定位基站作为圆心,将获得的toa测距值作为半径,绘制出不同的圆,这些圆交集于一点的位置即为所求移动标签的位置坐标;
10、设置定位基站的坐标为(xi,yi,zi),其中i=1,2,3,…,n,n≥5,n为定位基站的个数,移动标签的坐标为(x,y,z),移动标签发射信号的时间戳设为tt,信号到达第i个定位基站的时间戳为ti,则移动标签到第i个定位基站的距离值为:
11、
12、其中,c表示无线电信号的传播速率,ri表示移动标签到第i个定位基站的距离值;
13、(二)建立rssi模型
14、建立rssi模型,rssi模型中的rssi数据为接收信号功率prx,接收信号功率prx的表达式为:
15、
16、其中,c表示信道脉冲响应功率值,m表示前导累加计数值,a表示与信道脉冲重复频率相关的常量,a的具体的取值如下:
17、
18、其中,prf表示信道脉冲重复频率;
19、(三)建立视距状态数据模型
20、通过计算接收信号功率prx与第一路径功率之间的差异来判断信号的视距状态,具体的判断方法如下:
21、
22、其中,表示o时刻第m个测量的视距状态,表示测量为视距状态,表示测量为非视距状态,pfp表示第一路径功率。
23、作为第二种限定,步骤s1中,建立非线性高斯过程回归模型的具体过程为:
24、通过均值函数和协方差函数定义高斯过程回归模型为:
25、f(g)~gp(m(g),k(g,g')); (4)
26、其中,f(g)表示高斯过程回归模型,gp表示高斯过程,m(g)表示均值函数,k(g,g’)表示协方差函数,g表示输入数据,g’表示与g不同的输入数据;
27、假设均值函数为零,协方差函数为高斯核函数,即:
28、
29、其中,表示方差参数,i表示长度尺度参数;
30、将观测数据代入高斯过程模型中,得到先验分布为:
31、
32、其中,p(·)表示先验分布,n(·)表示高斯分布,e*表示新的输入数据,f*表示与e*对应的输出数据,e和q均表示观测数据,表示均值向量,cov(f*)表示协方差矩阵;
33、通过观测数据来更新先验分布,得到后验分布为:
34、
35、其中,k表示训练数据的协方差矩阵,k*表示训练数据和新的输入数据之间的协方差矩阵,k**表示新的输入数据之间的协方差矩阵,k-1表示k的逆矩阵,表示f(g)的均值;
36、通过后验分布,得到对高斯过程回归模型结果的预测值和其不确定性的估计,即:
37、
38、
39、其中,var(yn+1)表示预测值的方差。
40、作为进一步限定,步骤s1中,建立超宽带定位模型的具体过程为:
41、在三维空间内,利用定位基站获得的toa测距值来预测移动标签的位置,其中,根据公式(1)得到:
42、
43、
44、其中,
45、根据移动标签到第一个定位基站距离值,和移动标签到第j个定位基站距离值,其中,2≤j≤n,可知:
46、
47、则可得到:
48、
49、
50、
51、即:
52、
53、建立以za为变量的线性方程组:
54、
55、式中:
56、
57、
58、b=diag{r1,r2,…rl,…,rn};
59、u=[u1 u2 … ul … un];
60、其中,za表示未知数向量,zp表示移动标签的坐标位置,zp=[x y z]t,表示误差向量,h表示组成的矩阵,g表示2(xj-x1 yj-y1 zj-z1)组成的矩阵,rl表示移动标签到第l个定位基站的距离值,ul表示时延误差,c表示无线电信号的传播速率,⊙表示hadamard乘积;
61、通过第一次加权最小二乘得到za的第一次估计值:
62、za=(gtψ-1g)gtψ-1h; (14)
63、其中,ψ表示误差向量的协方差矩阵,e1表示单位矩阵,q表示toa测距值的协方差矩阵,q=e1[uut];
64、建立线性方程组:
65、
66、式中:
67、
68、za,1=x+e1;
69、za,2=y+e2;
70、za,3=z+e3;
71、
72、
73、其中,表示更新后的误差向量,za,1表示za第一行第一列的数,za,2表示za第二行第二列的数,za,3表示za第三行第三列的数,e1、e2和e3为za的估计误差,x、y和z为移动标签在x、y和z三个方向的真实值;
74、通过第二次加权最小二乘得到za的第二次估计值:
75、z'a=(g'ψ'-1 g')-1(g'ψ'-1 h'); (16)
76、式中,
77、b'=diag{x y z};
78、
79、其中,δza表示za的估计误差;
80、最终移动标签的位置表达式:
81、
82、作为再进一步限定,步骤s2的具体过程为:
83、s21、通过toa、rssi和视距状态数据模型读取视距状态数据,通过给定的表示测量为视距状态,表示测量为非视距状态,对视距状态数据进行判断;若视距状态数据为视距数据,则直接得到该视距数据对应的超宽带数据;
84、若视距状态数据为非视距数据,则对该非视距数据对应的rssi数据进行径向基函数插值得到插值后的rssi数据;
85、s22、通过非线性高斯过程回归模型对插值后的rssi数据进行高斯过程回归得到高斯回归后的rssi数据;
86、s23、对高斯回归后的rssi数据进行判断,记录最小rssi数据所对应的基站序号;
87、s24、除去最小的rssi数据所对应的超宽带数据得到筛选后的超宽带数据,将步骤s21中得到的视距数据对应的超宽带数据和筛选后的超宽带数据一同通过超宽带定位模型解算位置坐标,完成定位。
88、作为更进一步限定,步骤s21中,径向基函数插值的计算公式为:
89、
90、其中,ωi表示权重,ri表示径向基函数的中心,表示径向基函数,u表示插值点。
91、本发明由于采用了上述的技术方案,其与现有技术相比,所取得的技术进步在于:
92、(1)本发明通过对非视距数据对应的rssi数据进行径向基函数插值,然后通过非线性高斯过程回归模型进行高斯过程回归,除去其中最小的rssi数据所对应的超宽带数据后得到筛选后的超宽带数据,然后和视距状态数据为视距数据时得到的超宽带数据一同通过超宽带定位模型解算位置坐标,完成定位,进一步提高复杂室内情况下的定位精度;
93、(2)本发明通过剔除对定位结果有负面影响的超宽带数据,选择正确的超宽带数据,从而提高了定位精度;
94、(3)本发明提高了室内的定位精度,计算复杂度低,适用于工程应用。
95、综上所述,本发明适用于室内定位,通过去除对定位结果有负面影响的超宽带数据,提高了定位精度。
- 还没有人留言评论。精彩留言会获得点赞!