一种基于AI的掌静脉智能识别系统及方法与流程
本发明涉及生物特征信息处理,更具体地说,它涉及一种基于ai的掌静脉智能识别系统及方法。
背景技术:
1、用掌静脉进行身份认证时,获取的是掌静脉的图像特征,例如公告号为cn105224906b的发明公开了一种掌静脉识别智能系统,训练及投影掌静脉图像,通过分类器的匹配得到五个候选的掌静脉图像来进行特征匹配。
2、诸如前述的掌静脉身份认证系统均是基于手掌平面状态的掌静脉图像进行识别的,掌静脉图像一般是基于红外波段的图像特征识别的,可以较为容易的被非法拍摄获取完整的手掌的掌静脉图像,以此可以结合3d打印和血液流动模拟来模拟重构掌静脉生物特征,导致识别系统的风险。
技术实现思路
1、本发明提供一种基于ai的掌静脉智能识别系统及方法,解决相关技术中非法拍摄获取完整的手掌的掌静脉图像能够被用于破解掌静脉识别系统的技术问题。
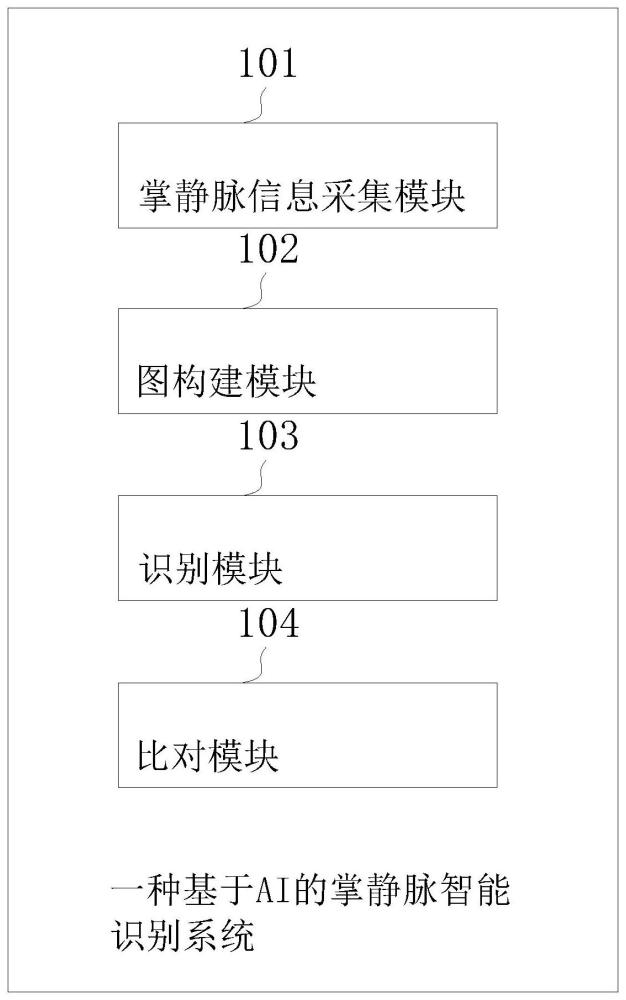
2、本发明提供了一种基于ai的掌静脉智能识别系统,包括:
3、掌静脉信息采集模块,其用于采集n个手掌正面的掌静脉图像,手掌贴合球面,该球面的球心是n个掌静脉图像的相机坐标系的原点,采集n个手掌正面的掌静脉图像的相机的光轴以球面的球心为中心均匀放射分布;
4、图构建模块,其基于采集的掌静脉图像构建图结构数据,图结构数据包括n个节点,一个节点与一个掌静脉图像建立数据联系,节点之间构建边,两个节点构建边的条件是:定义这两个节点分别为a节点和b节点,则a节点与b节点数据联系的掌静脉图像的相机的光轴的夹角小于或等于a节点与c节点数据联系的掌静脉图像的相机的光轴的夹角,c节点所述的节点集合包括除a节点和b节点之外的所有节点;每个节点包括一个连接自身的边;
5、识别模块,其用于将采集的n个掌静脉图像输入掌静脉识别模型中,掌静脉识别模型包括:第一卷积层,其用于分别输入掌静脉图像,然后分别输出对应于每个掌静脉图像的图像特征;特征编码层,其用于输入所有掌静脉图像的图像特征和图结构数据,然后输出节点特征矩阵;空间位置识别层,其用于输入节点特征矩阵,然后输出空间位置向量;图重构层,其用于输入空间位置向量和图结构数据,然后输出第二邻接矩阵;识别层,其用于输入第二邻接矩阵和节点特征矩阵,然后输出编码矩阵;
6、比对模块,其用于将识别模块获得的编码矩阵与掌静脉数据库中的参考编码矩阵进行对比,与任意一个参考编码矩阵匹配则输出识别成功的结果,编码矩阵与参考编码矩阵的匹配度大于设定的阈值则表示编码矩阵与参考编码矩阵匹配。
7、进一步地,任意一个掌静脉图像的相机坐标系的z轴与其他掌静脉图像的相机坐标系的z轴之间的夹角都是相同的一组角度值。
8、进一步地,特征编码层的计算公式如下:
9、
10、其中c表示图像特征矩阵,其中第i行表示第i个图像特征,表示第一邻接矩阵与单位矩阵的和,表示的度矩阵,w表示特征编码层的权重参数,σ表示singmoid函数;
11、如果第i个与第j个节点之间存在边,则第一邻接矩阵的第i行第j列的元素值为1,否则为0。
12、进一步地,空间位置识别层的计算公式如下:
13、k=σ(wkj+bk)
14、其中j表示节点特征矩阵,σ表示singmoid函数,wk表示空间位置识别层的权重参数,bk表示空间位置识别层的偏置参数;
15、图重构层的计算公式如下:
16、
17、表示将大于0.5的元素归置为1,将不大于0.5的元素归置为0,表示逐行的相加,表示逐列的相加,l1表示第一邻接矩阵,k表示空间位置向量。
18、进一步地,识别层的计算公式如下:
19、o1=srelu(sxw1)w2
20、o2=srelu(sxw1)w3
21、
22、其中x表示节点特征矩阵,节点特征矩阵的一个行向量表示一个节点特征,o1表示第一编码矩阵,o2表示第二编码矩阵,表示节点的第二邻接矩阵与单位矩阵的和,表示的度矩阵,w1、w2、w3表示识别层的权重参数;
23、输出层的计算公式如下:
24、z=o1+o2*ε,ε~n(0,i)
25、其中ε表示符合标准高斯分布的随机常数,z表示输出矩阵。
26、进一步地,掌静脉识别模型训练时其输出层连接还原层,还原层的计算公式如下:
27、
28、u表示还原矩阵,σ表示sigmoid函数。
29、进一步地,比对模块计算编码矩阵与参考编码矩阵的匹配度的计算方法包括:
30、
31、其中p表示编码矩阵与参考编码矩阵的匹配度,simlui,i表示编码矩阵与参考编码矩阵的第i个行向量的相似度。
32、进一步地,行向量的相似度为余弦相似度。
33、本发明提供了一种基于ai的掌静脉智能识别的加密认证方法,基于前述的一种基于ai的掌静脉智能识别系统执行以下步骤:
34、步骤201,采集n个手掌正面的掌静脉图像,手掌贴合球面,该球面的球心是n个掌静脉图像的相机坐标系的原点,采集n个手掌正面的掌静脉图像的相机的光轴以球面的球心为中心均匀放射分布。
35、步骤202,基于采集的掌静脉图像构建图结构数据,图结构数据包括n个节点,一个节点与一个掌静脉图像建立数据联系,节点之间构建边,两个节点构建边的条件是:定义这两个节点分别为a节点和b节点,则a节点与b节点数据联系的掌静脉图像的相机的光轴的夹角小于或等于a节点与c节点数据联系的掌静脉图像的相机的光轴的夹角,c节点所述的节点集合包括除a节点和b节点之外的所有节点;每个节点包括一个连接自身的边;
36、步骤203,将采集的n个掌静脉图像输入掌静脉识别模型中,掌静脉识别模型包括:
37、第一卷积层,其用于分别输入掌静脉图像,然后分别输出对应于每个掌静脉图像的图像特征;
38、特征编码层,其用于输入所有掌静脉图像的图像特征和图结构数据,然后输出节点特征矩阵;
39、空间位置识别层,其用于输入节点特征矩阵,然后输出空间位置向量;
40、图重构层,其用于输入空间位置向量和图结构数据,然后输出第二邻接矩阵;
41、识别层,其用于输入第二邻接矩阵和节点特征矩阵,然后输出编码矩阵;
42、步骤203,将识别模块获得的编码矩阵与掌静脉数据库中的参考编码矩阵进行对比,与任意一个参考编码矩阵匹配则输出识别成功的结果。
43、本发明提供了一种存储介质,其存储了非暂时性计算机可读指令,当非暂时性计算机可读指令由计算机执行时,能够执行前述的一种基于ai的掌静脉智能识别的加密认证方法的步骤。
44、本发明的有益效果在于:本发明采用了一种球形空间分布的掌静脉生物特征生成识别的方法,避免了拍摄手掌造成的掌静脉生物特征识别,并且适应于多相机的采集方法和球形空间分布的掌静脉特征设计基于卷积和空间特征校正与识别的掌静脉识别模型,能够准确一致性的提取掌静脉特征用于加密识别。
- 还没有人留言评论。精彩留言会获得点赞!