基于豪斯多夫距离感知的三维模型简化方法及系统
本发明涉及三维模型简化,特别是涉及基于豪斯多夫距离感知的三维模型简化方法及系统。
背景技术:
1、本部分的陈述仅仅是提到了与本发明相关的背景技术,并不必然构成现有技术。
2、3d模型构成了虚拟世界的基石,其复杂性和细节程度直接影响到其真实性和说服力。然而,高精细度的3d模型对计算机存储、渲染、传输及编辑处理造成了显著的负担。为此,3d模型简化技术的开发成为了解决这些问题的重要途径。
3、3d模型简化目前已经产生了众多算法和实际应用。这些方法包括网格简化、从点云进行网格重建、移除小尺度细节以简化复杂多边形网格,以及网格优化和重网格划分技术。尽管如此,这些方法可能无法满足移动设备等低性能平台上快速增长的应用需求。在移动平台上,优质的3d模型通常仅包含数千个三角形,远低于传统level of detail (lod)方法中的标准。这些简化技术无法为较低性能的平台生成极低多边形网格,仍然存在下列的问题:目前的方法,例如blender、qem、fmeps和pm等在生成极低多边形网格时,可能会出现三角面片相互遮挡的问题,这会降低网格的视觉质量。此外,目前的方法在简化网格时常常无法维持良好的几何结构。最后,为移动应用程序创建低多边形网格在现实工作中仍是一项劳动密集且耗时的任务。
技术实现思路
1、为了解决现有技术的不足,本发明提供了基于豪斯多夫距离感知的三维模型简化方法及系统。
2、一方面,提供了基于豪斯多夫距离感知的三维模型简化方法,包括:获取待处理的三维网格模型和预期的三角面片数量;统计三维网格模型中三角面片的数量,对待处理的三维网格模型的每一条边,生成一个初始顶点,优化初始顶点,得到新顶点;根据新顶点,计算每一条边的折叠代价;建立小根堆,将所有边按照折叠代价由小到大排序后依次放入小根堆中,将折叠代价最小的边放置在小根堆的顶部;从小根堆中取出折叠代价最小的边,对取出的边进行折叠,所述折叠是将与当前边相连的两个端点合并成一个新顶点,折叠后,更新的值;对于与新顶点相连的任一条边,生成一个初始顶点,优化初始顶点得到新顶点, 然后根据顶点计算边的折叠代价;根据折叠代价,将边放入小根堆中;判断三角面片的数量是否小于等于预期的三角面片数量,如果否,就继续从小根堆中取出折叠代价最小的边,如果是,就结束,输出简化后的三维网格模型。
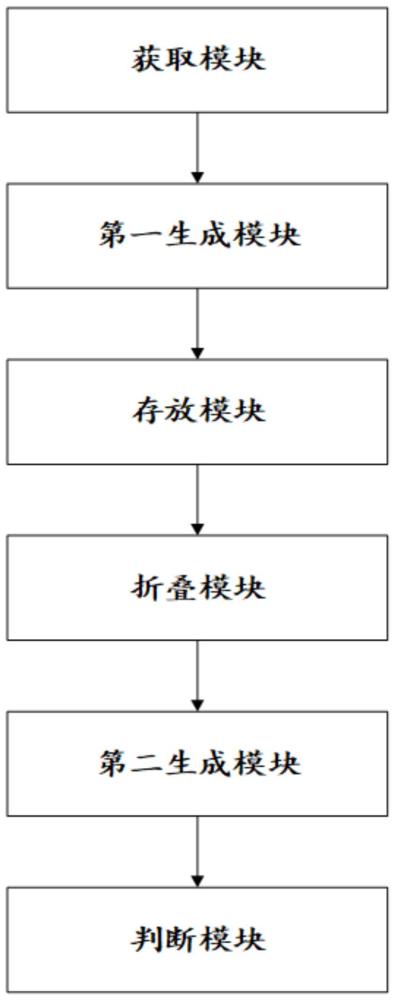
3、另一方面,提供了基于豪斯多夫距离感知的三维模型简化系统,包括:获取模块,其被配置为:获取待处理的三维网格模型和预期的三角面片数量;第一生成模块,其被配置为:统计三维网格模型中三角面片的数量,对待处理的三维网格模型的每一条边,生成一个初始顶点;优化初始顶点,得到新顶点;根据新顶点,计算每一条边的折叠代价;存放模块,其被配置为:建立小根堆,将所有边按照折叠代价由小到大排序后依次放入小根堆中,将折叠代价最小的边放置在小根堆的顶部;折叠模块,其被配置为:从小根堆中取出折叠代价最小的边,对取出的边进行折叠,所述折叠是将与当前边相连的两个端点合并成一个新顶点,折叠后,更新的值;第二生成模块,其被配置为:对于与新顶点相连的任一条边,生成一个初始顶点,优化初始顶点得到新顶点, 然后根据顶点计算边的折叠代价;根据折叠代价,将边放入小根堆中;判断模块,其被配置为:判断三角面片的数量是否小于等于预期的三角面片数量,如果否,就返回折叠模块,如果是,就结束,输出简化后的三维网格模型。
4、上述技术方案具有如下优点或有益效果:提出了一种新的基于豪斯多夫距离感知表面网格简化框架,旨在通过优化豪斯多夫距离来实现边折叠前后两网格的高度相似。本发明采用了一种基于多点对约束的能量优化函数,专门用于计算和优化边折叠后新顶点的位置,以此来最小化两网格之间的豪斯多夫距离。此外,本发明还将优化后的豪斯多夫距离作为当前边折叠操作的成本指标,以确保模型简化过程中几何结构能最大程度的保留。本发明的方法特别针对“极低”多边形网格的生成进行了优化设计。与现有技术相比,本发明的方法在保持几何精度和视觉相似性方面表现出更优异的性能。因此,当设计师或艺术家需要为移动平台等资源受限环境设计3d模型时,可以选择适当的原始模型数据集,并运用本方法高效生成“极低”多边形网格,显著提升其设计流程的效率。
技术特征:
1.基于豪斯多夫距离感知的三维模型简化方法,其特征是,包括:
2.如权利要求1所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,对待处理的三维网格模型的每一条边,生成一个初始顶点,是基于网格简化算法生成的。
3.如权利要求1所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,优化初始顶点,得到新顶点;根据新顶点,计算每一条边的折叠代价,具体包括:
4.如权利要求3所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,在网格上生成若干个采样点,具体包括:
5.如权利要求3所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,使用初始顶点生成网格,然后在网格上生成若干个采样点,具体包括:折叠边,使用初始顶点来生成边折叠后的网格:对于边和其2个端点,使用顶点代替和,修改网格的拓扑关系,将与和相关的边映射到新顶点上;对网格进行细分,生成若干个样本点。
6.如权利要求3所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,计算采样点到网格的最近点,然后生成点对数组,对于网格上的每个样本点,计算其在网格中的最近点,将它们组合起来形成点对(,),将点对(,)加入到集合中。
7.如权利要求3所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,计算采样点到网格的最近点,然后生成点对数组,对于网格上的样本点,计算它们在网格上的最近点,并生成点对,将点对(,)加入到集合。
8.如权利要求3所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,使用、和求解能量函数的最小值,得到优化的新顶点,并计算,具体包括:
9.如权利要求3所述的基于豪斯多夫距离感知的三维模型简化方法,其特征是,使用计算边折叠前后两个网格之间的近似豪斯多夫距离,包括:
10.基于豪斯多夫距离感知的三维模型简化系统,其特征是,包括:
技术总结
本发明涉及三维模型简化技术领域,公开了基于豪斯多夫距离感知的三维模型简化方法及系统,方法包括:对待处理的三维网格模型的每一条边,生成一个初始顶点,优化初始顶点得到新顶点;计算每一条边的折叠代价;将边放置在小根堆;从小根堆中取出折叠代价最小的边进行折叠,将与该边相连的两个端点合并成一个新顶点,对于与新顶点相连的边,生成一个初始顶点,优化初始顶点得到新顶点,然后根据顶点计算边的折叠代价;根据折叠代价,将边放入小根堆中;当三角面片的数量小于等于预期的三角面片数量,输出简化后的三维网格模型。运用本方法能显著提升设计流程的效率。
技术研发人员:李雪梅,许云扬,张彩明
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!