一种链式着舰指挥方法
本发明涉及飞行指挥领域,具体涉及一种链式着舰指挥方法。
背景技术:
1、在固定翼飞机着舰训练中,着舰指挥官(landing signal officer, lso)依靠目视判断固定翼飞机下滑轨迹与标准着舰航线的偏差,并根据偏差情况下达相应口令,指挥固定翼飞机下滑着舰。目前被忽视的问题是这一偏差不仅包括飞行员操纵引起的轨迹偏差,也包括低空气流扰动(如风切变、下洗气流等)引起的飞机抖动。但由于lso在地面无法感知空中的气流扰动,实际执行中均按飞行员操纵引起的轨迹偏差下达指令,即飞机受气流扰动产生偏移后,lso会习惯性地认为是由于飞行员操纵不当引起的偏差,并据此下达口令要求飞行员修正偏差。
2、通常情况下,lso下达指令是在其察觉到飞机出现比较明显的偏差或趋势之后,飞行员从接收指令到进行相应操纵存在一定的反应时差,并且从操纵动作被执行到飞机姿态发生改变也存在一定的延迟,三重因素叠加,从而在一定程度上造成飞行员修正气流扰动引起的偏差动作不及时、效果不理想。在气象条件良好、回收强度不高的陆上模拟训练(field carrier landing practice, fclp)中,这一问题体现的还不明显;但恶劣气象条件叠加机群高强度回收将导致这一指挥机制难以满足要求。造成这一问题的原因有很多,既有人工指挥存在的固有缺陷(如目视观察受限导致飞机趋势预测不确定,决策时间短导致偏差判断不确定,或下达口令不及时等),也有飞行员感知偏差和修正偏差的能力不强等各方面因素。但另一个非常重要而又通常被忽视的原因,是飞行员与lso之间缺乏着舰感知信息的交流,尤其缺乏气流扰动感知信息的交流。一方面,lso只根据目视获取的偏差信息下达口令,而对飞行员的空中感受缺乏深刻体会,也就无法真正理解固定翼飞机着舰过程中存在的一些深层次、规律性问题,如普遍性的三、四转弯半径过大或过小,进入晚或进入早、舰尾先扬后沉、着舰前横滚力矩突变导致坡度不稳定等现象,而这对于飞行员减小航线偏差、安全着舰非常重要;另一方面,飞行员只根据菲涅尔透镜光学助降系统的灯光信号和lso口令修正偏差,对下滑道环境的感知无法与lso分享,导致这一宝贵的信息无法对后续飞行员发挥预警和辅助作用,造成极大的资源浪费。长此以往,飞行员与lso缺乏关键沟通,着舰指挥开环、孤立运行,训练效果也就难以提升。
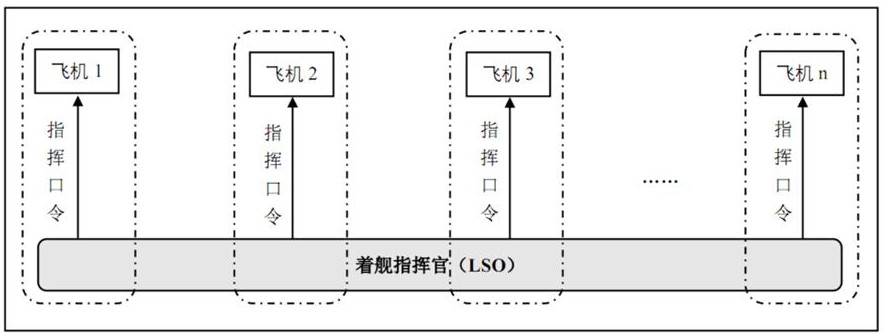
3、在固定翼飞机着舰过程中,飞行员对下滑道环境的感知具有十分重要的作用。尤其在着舰训练中,为提升回收效率,通常多架飞机同时训练,且前后间隔较短。此时,如果前一位飞行员及时将下滑道环境感知信息传递给lso,并通过lso传递给后续飞行员,帮助lso及后续飞行员及时掌握下滑道环境动态,将有助于后续飞行员提前分配注意力,采取措施稳定固定翼飞机姿态,避免或尽量减小气流扰动等不利环境因素造成的偏差,保持好攻角、高度和对中,减少人为差错,提高着舰成功率。如果每一位飞行员都能及时传递着舰感知信息,帮助lso和后续飞行员,后续飞行员更新着舰感知信息后又进而帮助其后的lso和飞行员,……如此迭代、循环,便形成了一个“飞行员-lso-飞行员”环环相扣的闭环指挥链条。在这一链条中,每一位飞行员都能获得lso和前面飞行员的辅助信息,lso与飞行员之间也更加深度地融合为一体。
4、目前,现有技术中未有相关链条式的着舰指挥机制的相关报道。因此,亟需设计一种能解决上述技术问题的着舰指挥方法。
技术实现思路
1、本技术提供能解决上述技术问题的链式着舰指挥方法。
2、为了解决上述技术问题,本技术实施例提供了如下的技术方案:
3、一种链式着舰指挥方法,其特殊之处在于包括以下步骤:
4、步骤1:结合飞行训练实际,建立复杂气流扰动和高强度回收下固定翼飞机着舰过程的数学模型;
5、步骤2:结合飞行训练实际,建立固定翼飞机着舰指挥的数学模型;
6、步骤3:建立链式着舰指挥机制,帮助飞行员实现气流扰动信息的实时感知、传递和预警;
7、步骤4:结合飞行训练实际,建立链式着舰指挥流程,实现复杂气流扰动及高强度回收下固定翼飞机安全着舰。
8、优选的,所述步骤1的具体过程为:
9、建立固定翼飞机着舰训练过程的数学模型:
10、(一)单架飞机着舰训练过程的数学模型
11、固定翼飞机训练中,通常一个架次fclp包含多个航次,假设飞机在时刻1的状态为,在时刻2的状态为,依次递推,在时刻的状态为;假设机上飞行员通过菲涅尔透镜光学引导设备的灯光以及固定翼飞机仪表等感知的每个时刻的自身状态分别为;假设飞机在每个时刻的标准航线对应的状态应为;则固定翼飞机在所有时刻的状态集合为,飞行员感知集合为,标准状态集合为;
12、飞行员的操纵行为取决于飞行员对飞机状态的感知以及在感知基础上产生的飞行员意图,因此飞机的最终状态也与飞行员的感知有关,令表示每个时刻在飞行员所感知状态的基础上,飞机经过飞行员操纵或气流扰动所达到的状态的联合概率密度,根据贝叶斯公式,
13、有
14、
15、其中,表示第个时刻在飞机状态为的条件下飞行员感知到飞机状态为的概率密度。假设飞行员在某个时刻的感知误差为,则有如下表达式:
16、
17、其中,表示飞机在前后两个时刻间的状态转变的概率密度。实际上,考虑到固定翼飞机4d航线以及飞行员操纵动作的连贯性,不同时刻的飞机状态之间存在较为确定的关系,因此有
18、
19、其中,为k-1时刻外部输入的控制,为气流扰动引起的轨迹偏差,为前后两个时刻飞机状态的转移函数。
20、外部输入的控制主要由飞行员的意图和lso的指令组成,从而可以建模为
21、
22、其中,为飞行员的意图权重,为lso的指挥权重,并且有;
23、(二)多架飞机着舰训练过程的数学模型
24、实际训练中,多架飞行同时飞行,为此在单架飞机着舰训练过程模型基础上,建立多架飞机着舰训练过程模型;
25、假设fclp训练中有架飞机同时训练(可以是不同机型),通常情况下,各架飞机的状态相互独立,飞行间隔相等;假设飞机的回收效率为每 t秒1架,即当第1架飞机在第秒回收时,第架飞机在第秒回收;设每架飞机在第1秒的状态集合为,时刻2为,...,时刻为,则有
26、
27、飞行员通过灯光信号、仪表等得到的对飞机状态的感知集合分别为
28、
29、则飞机的状态集合为
30、
31、飞行员感知集合为
32、
33、则根据贝叶斯公式,有
34、
35、其中,为个飞行员从开始训练到最终着舰共个时刻飞机状态的概率密度,为第个时刻飞行员感知的飞机状态的概率密度,为所有架飞机从时刻到时刻的飞机状态转移的概率密度,为所有个飞行员从开始训练到着舰前一刻总共个时刻飞机状态的概率密度,对于状态转移概率密度而言,由于每一架飞机的状态转移都是独立、互不影响的,因此有
36、
37、其中,表示第1架飞机从时刻到时刻的状态转移密度。
38、优选的,所述步骤2的具体过程为:
39、lso指挥存在多个环节,主要包括:
40、1)lso观察飞机的位置。这一过程可以建模为
41、
42、其中,表示k时刻lso观察的飞机位置,并且
43、
44、其中,为k时刻lso的观测误差;
45、2)lso判断飞机的偏差,这一过程建模为
46、
47、其中,表示k时刻lso判断出的飞机偏差;
48、3)lso做出决策,这一过程建模为
49、
50、其中,表示k时刻lso所作出的决策;
51、4)lso执行决策,这一过程可建模为
52、
53、 其中,为lso所下达的口令;
54、根据条件概率密度公式可得
55、
56、从而有:
57、
58、 即在当前飞机状态下,lso所下达的口令取决于着舰指挥的前3个环节;将公式(19)带入公式(4),
59、可得到修正的外部控制方程
60、
61、优选的,所述步骤3的具体过程为:
62、根据公式(3),有
63、,其中表示外部气流对飞机的扰动作用,
64、对公式(4)进行如下修改
65、
66、其中,表示估计出的气流扰动量;即,如果能提前估计出气流扰动的情况,并在输入控制中进行抵消,则可以使飞机免受或少受气流扰动的影响,从而实现复杂气象条件下的安全着舰;
67、具体而言,当第一架进近的飞机感受到气流扰动时,飞行员及时将感知到的气流扰动传递给lso,并由lso传递给后一名飞行员,便能够抵消气流影响,实现安全着舰,这种着舰指挥方法称之为链式着舰指挥。
68、优选的,所述步骤4的具体过程为:
69、采取如下的链式着舰指挥流程:
70、1)当第1架飞机进入下滑道后,根据菲涅尔透镜光学助降系统的引导灯光指示操纵飞机下滑,当在下滑道上感受到较强气流扰动(如公鸡尾流)、明显影响飞机姿态时,飞行员及时将自己感受到的气流扰动情况向lso进行简短报告;
71、2)lso获取下滑道上飞行员报告的气流扰动后,密切关注飞机姿态、及时指挥飞行员调整偏差;
72、3)当第2架飞机进入下滑道并改平后,lso向飞行员简要通报第1架飞机感受到的气流扰动情况,包括扰动所处的下滑道位置、扰动对飞机的影响(造成侧滑、下沉等)等,提醒飞行员集中注意力操纵飞机,提前采取措施稳定飞机姿态;
73、4)lso根据2)、3)指挥第2架飞机及后续飞机稳定飞行姿态,直至着舰。
74、通过以上流程,在复杂气流扰动和高强度回收下,固定翼飞机飞行稳定性和着舰安全性得到显著提升。
75、本发明提出的链式着舰指挥突破了传统思路,从指挥机制本身出发,通过气流扰动感知信息的迭代传递,实现“前人感知、后人预警”,在不增添装备前提下,可零成本抑制复杂气流影响,有效预防极端环境导致的人为差错,提升复杂气象条件和高强度回收下的舰载起降质效。具体而言,本发明的有益技术效果主要体现在以下四个方面:
76、1、所建立的着舰训练的多架次、全要素模型与实际的固定翼飞机着舰训练过程高度一致,为分析固定翼飞机着舰训练问题提供了严格的数学支撑,这是目前中外文献中已有模型均无法提供的。
77、2、所建立的着舰指挥数学模型与实际的固定翼飞机着舰指挥过程高度一致,为分析着舰指挥问题提供了严格的数学支撑,目前中外文献中尚没有类似模型可用于分析相关问题。
78、3、通过链式着舰指挥,充分利用气流扰动的人感信息,实现了气流信息迭代更新,能够帮助飞行员提前预警,从而及时采取措施抑制气流扰动的影响,实现固定翼飞机安全着舰。
79、4、通过链式着舰指挥,在不增加任何装备前提下,能够零成本实现舰尾流及舰岛流等复杂气流扰动的实时抑制,解决了以往拟制方法中需要采用cfd进行大量计算或加装气流探测、补偿设备的问题。
- 还没有人留言评论。精彩留言会获得点赞!