一种隧道裂纹分割识别方法
本发明涉及图像处理,具体涉及一种隧道裂纹分割识别方法。
背景技术:
1、隧道裂纹是隧道常见的病害,隧道内洞面通常由于温度不均衡,热胀冷缩,造成洞面存在挤压出现裂纹。现有通过采集隧道的图像,可以实现实时监测隧道裂纹情况,但是现有的隧道裂纹分割识别方法通常采用卷积神经网络,例如yolo神经网络对裂纹目标进行识别,从而获取到裂纹位置,但是卷积神经网络中包含大量的卷积层和池化层,存在计算复杂度高和计算量大的问题,且隧道本身是分段浇筑或者是管片拼接而成,就存在较多类似于裂纹的痕迹,容易被误识别,存在裂纹识别精度不高的问题。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种隧道裂纹分割识别方法解决了以下技术问题:
2、1、采用卷积神经网络进行隧道裂纹分割识别,存在计算复杂度高和计算量大的问题;
3、2、隧道本身存在较多类似于裂纹的痕迹,容易被误识别,现有的隧道裂纹分割识别方法存在裂纹识别精度不高的问题。
4、为了达到上述发明目的,本发明采用的技术方案为:一种隧道裂纹分割识别方法,包括以下步骤:
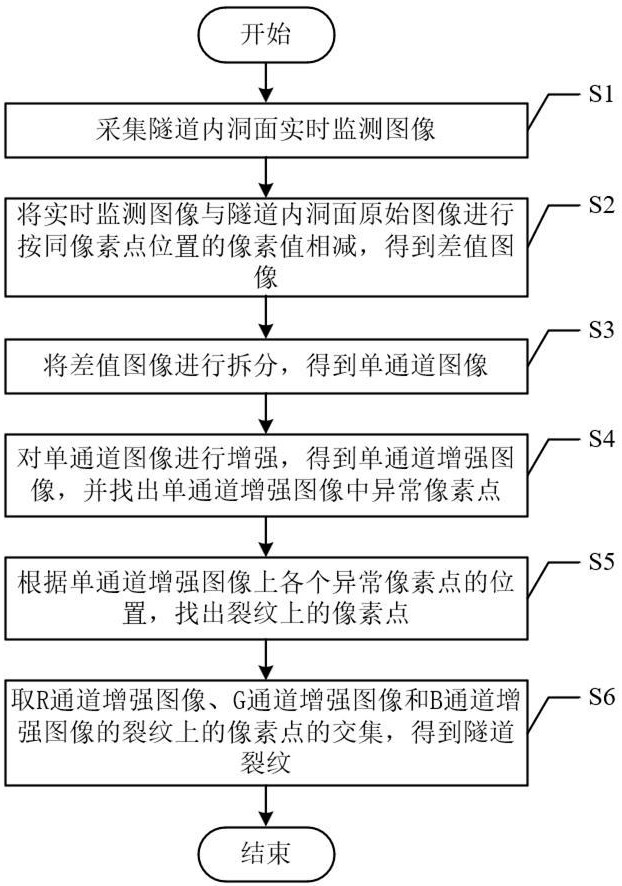
5、s1、采集隧道内洞面实时监测图像;
6、s2、将实时监测图像与隧道内洞面原始图像进行按同像素点位置的像素值相减,得到差值图像;
7、s3、将差值图像进行拆分,得到单通道图像,其中,单通道图像包括:r通道图像、g通道图像和b通道图像;
8、s4、对单通道图像进行增强,得到单通道增强图像,并找出单通道增强图像中异常像素点,其中,单通道增强图像包括:r通道增强图像、g通道增强图像和b通道增强图像;
9、s5、根据单通道增强图像上各个异常像素点的位置,找出裂纹上的像素点;
10、s6、取r通道增强图像、g通道增强图像和b通道增强图像的裂纹上的像素点的交集,得到隧道裂纹。
11、综上,本发明的有益效果为:本发明中采用实时监测图像与隧道内洞面原始图像相减的方式,解决隧道内存在类似裂纹的痕迹带来的影响,同时,更便于发现隧道的新变化,凸出隧道变化位置,再将差值图像进行拆分,得到三种单通道图像,对单通道图像进行增强处理,进一步地增大异常区域的通道值与正常区域的通道值的距离,使得异常区域更显著,提高提取异常像素点的精度,再从异常像素点中找到裂纹上的像素点,取三种单通道增强图像的裂纹上的像素点的交集,得到隧道裂纹,提高裂纹分割识别的精度。
12、本发明中根据差值图像上各个通道值的分布情况,找出对应裂纹上的像素点,计算量和复杂度远远小于卷积神经网络,解决现有采用卷积神经网络进行隧道裂纹分割识别,存在计算复杂度高和计算量大的问题。
13、本发明中在隧道内同一位置处,可能由于光线明暗的变化,该位置成像后,造成实时监测图像与隧道内洞面原始图像在该位置的像素值不同,但是光线明暗的变化对隧道内洞面的影响是整体的,因此,采用实时监测图像与隧道内洞面原始图像相减的方式,解决隧道内存在类似裂纹的痕迹带来的影响,且能凸出隧道内的新变化区域。
14、进一步地,所述s4包括以下分步骤:
15、s41、对单通道图像进行增强处理,得到单通道增强图像;
16、s42、根据单通道增强图像中每个像素点的邻域通道值,计算每个像素点的异常值;
17、s43、在像素点的异常值大于异常阈值时,该像素点为异常像素点。
18、进一步地,所述s41包括以下分步骤:
19、s411、根据各个通道值的距离,对单通道图像进行聚类处理,找到面积占比最大的区域,归为正常区域;
20、s412、根据正常区域内通道值,对单通道图像进行增强处理,得到单通道增强图像。
21、上述进一步地方案的有益效果为:由于本发明中利用的是差值图像,而差值图像中包含光线带来的整体变化以及隧道内结构上的新变化,光线带来的整体变化面积占比较大,因此,本发明中根据各个通道值的距离,对单通道图像进行聚类处理,即将通道值相似的一类归为一个区域,占比最大的为正常区域。
22、进一步地,所述s412中对单通道图像进行增强处理的公式为:
23、,
24、其中,tz为增强后的通道值,t为单通道图像中任一待增强的通道值,tanh为双曲正切函数,ti为正常区域中第i个通道值,n为正常区域中通道值的数量,i为正整数。
25、上述进一步地方案的有益效果为:本发明中以正常区域为目标,根据单通道图像中任一待增强的通道值与正常区域内通道均值的距离,体现该待增强的通道值的异常情况,距离越大,增强后的通道值越大,与正常区域的区分更显著。
26、进一步地,所述s42包括以下分步骤:
27、s421、以单通道增强图像中每个像素点为中心点;
28、s422、根据中心点的内层邻域范围的通道值,计算中心点的第一异常系数,其中,内层邻域范围为33邻域区域;
29、s423、根据中心点的外层邻域范围的通道值,计算中心点的第二异常系数,其中,外层邻域范围为55邻域区域中减去33邻域区域的剩余区域;
30、s424、将第一异常系数和第二异常系数相加,得到每个像素点的异常值。
31、上述进一步地方案的有益效果为:本发明中在增强后,更利于提取出异常像素点,以单通道增强图像中每个像素点为中心点,根据两个范围内,通道值的分布情况,从而确定出该中心点的异常值,异常值用于表达该中心点是否处于通道值异常变化的位置。
32、进一步地,所述s422中计算中心点的第一异常系数的公式为:
33、,
34、其中,u1为中心点的第一异常系数,tj为内层邻域范围的第j个通道值,h为固定常数,j为正整数;
35、所述s423中计算中心点的第二异常系数的公式为:
36、,
37、其中,u2为中心点的第二异常系数,tk为外层邻域范围的第k个通道值。
38、上述进一步地方案的有益效果为:本发明选择了两个范围:内层邻域范围和外层邻域范围,从而提高异常像素点的选择精度,通过邻域的通道值分布情况,能反映该区域的通道值是否波动,波动代表该区域可能是纹裂与正常区域的过渡点。
39、进一步地,所述s5包括以下分步骤:
40、s51、根据单通道增强图像上异常像素点的mm邻域范围内各个异常像素点的位置,获取异常像素点的横向变化向量、纵向变化向量和方向变化向量,其中,m为正整数;
41、s52、根据异常像素点的横向变化向量、纵向变化向量和方向变化向量,采用三层bp神经网络,计算异常像素点的疑似裂纹系数;
42、s53、根据异常像素点的疑似裂纹系数,得到每个异常像素点的裂纹值;
43、s54、在裂纹值大于裂纹阈值时,对应异常像素点为裂纹上的像素点。
44、进一步地,所述s51具体为:从异常像素点的mm邻域范围内等距采样k+1个异常像素点,采用第n+1个采样异常像素点与第n个采样异常像素点的横坐标相减,得到横向变化向量中第n个横向变化值xb,n,k和n为正整数,横向变化向量为:x={xb,n},其中,x为横向变化向量,n的取值范围为1~k;
45、采用第n+1个采样异常像素点与第n个采样异常像素点的纵坐标相减,得到纵向变化向量中第n个纵向变化值yb,n,纵向变化向量为:y={yb,n},其中,y为纵向变化向量;
46、采用第n+1个采样异常像素点与第n个采样异常像素点的角度相减,得到方向变化向量中第n个方向变化值rn,方向变化向量为:r={rn},其中,r为方向变化向量,rn=en+1-en,en+1为第n+1个采样异常像素点的角度,en为第n个采样异常像素点的角度,en+1=arctan(yn+1/xn+1),xn+1为第n+1个采样异常像素点的横坐标,yn+1为第n+1个采样异常像素点的纵坐标,en=arctan(yn/xn),xn为第n个采样异常像素点的横坐标,yn为第n个采样异常像素点的纵坐标,arctan为反正切函数。
47、上述进一步地方案的有益效果为:本发明根据异常像素点的mm邻域范围内各个异常像素点的位置,从而获取异常像素点的横向变化向量、纵向变化向量和方向变化向量,通过邻域范围内坐标的变化,表达该异常像素点的特征,再采用三层bp神经网络去预估该异常像素点的疑似裂纹系数。
48、本发明中横向变化向量表达mm邻域范围横坐标的变化趋势,纵向变化向量表达mm邻域范围纵坐标的变化趋势,方向变化向量表达mm邻域范围像素点角度的变化趋势,综合三方面的因素,预估异常像素点的疑似裂纹系数。
49、进一步地,所述s52中三层bp神经网络包括:第一输入层、第二输入层、第三输入层、第一隐藏层、第二隐藏层、第三隐藏层和输出层;
50、所述第一输入层用于输入横向变化向量,其输出端与第一隐藏层的输入端连接;所述第二输入层用于输入纵向变化向量,其输出端与第二隐藏层的输入端连接;所述第三输入层用于输入方向变化向量,其输出端与第三隐藏层的输入端连接;所述输出层的输入端分别与第一隐藏层的输出端、第二隐藏层的输出端和第三隐藏层的输出端连接,其输出端作为三层bp神经网络的输出端。
51、上述进一步地方案的有益效果为:本发明中三个输入层和三个隐藏层各处理一个类型的数据,减少bp神经网络的复杂度,更好调控每个类型的数据对输出结果的影响。
52、进一步地,所述s53中得到每个异常像素点的裂纹值的公式为:
53、,
54、其中,l为异常像素点的裂纹值,fo为正在计算裂纹值的异常像素点的疑似裂纹系数,为正在计算裂纹值的异常像素点的mm邻域范围内第个异常像素点的疑似裂纹系数,为正整数,c为在计算裂纹值的异常像素点的mm邻域范围内异常像素点的数量,fth为门限值,γ为超门限系数,γ等于在计算裂纹值的异常像素点的mm邻域范围内疑似裂纹系数大于门限值的数量。
55、上述进一步地方案的有益效果为:本发明中在获取每个异常像素点的疑似裂纹系数后,根据周边范围内其他异常像素点的疑似裂纹系数以及自身的疑似裂纹系数,确定出与门限值的差值,差值越大越有可能为裂纹上的像素点,同时,设置超门限系数,在周边范围大多数疑似裂纹系数大于门限值时,该异常像素点也归为裂纹上的像素点。
- 还没有人留言评论。精彩留言会获得点赞!