自适应时间步长的晶圆抛光仿真方法、装置及可读介质与流程
本技术涉及集成电路,特别是涉及一种自适应时间步长的晶圆抛光仿真方法、装置及可读介质。
背景技术:
1、化学机械平坦化(chemical-mechanical planarization,cmp),又称化学机械抛光,是超大规模集成电路的生产过程中必不可少的一环。晶圆表面的晶体或金属材料在经过刻蚀沉积等工艺后表面变得凹凸不平,波动范围在几埃米到几千埃米不等,不利于生产过程中的良品率的提升,因此通过化学机械抛光解决该问题。计算机辅助设计领域的数值仿真技术可应用于cmp工艺过程的仿真预测,cmp数值仿真的核心求解器可被分为三个组成部分:有效抛光压力求解器、材料移除率求解器、形貌拓扑求解器。其中有效抛光压力求解器主要用于迭代求解抛光垫和晶圆之间各处的接触压力,材料移除率求解器主要依据各处的接触压力以及接触面材料等计算相应的材料移除率,形貌拓扑求解器则用于更新晶圆上表面形貌状态,整个仿真过程按照上述顺序进行迭代计算。
2、然而,当前仿真方案的形貌拓扑求解器在显式迭代求解数值积分时,在晶圆上表面的材料移除率差异较小的情况下,存在仿真效率较低的问题。
技术实现思路
1、在本实施例中提供了一种自适应时间步长的晶圆抛光仿真方法、装置及可读存储介质,以解决相关技术中存在的形貌拓扑求解时仿真效率较低的问题。
2、第一个方面,在本实施例中提供了一种自适应时间步长的晶圆抛光仿真方法,所述方法包括:
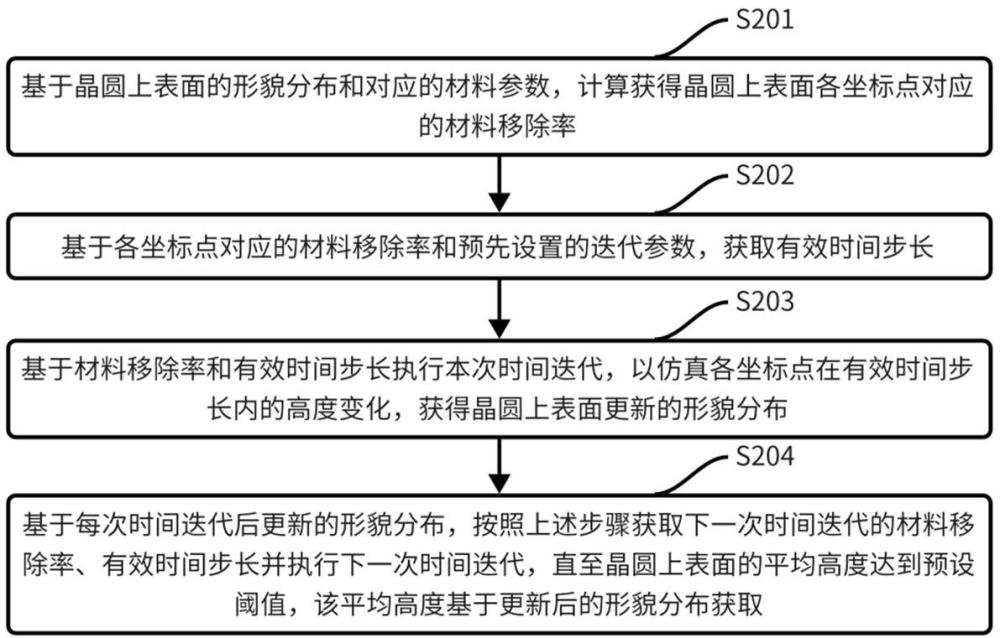
3、基于晶圆上表面的形貌分布和材料参数,计算获得所述晶圆上表面各坐标点对应的材料移除率;
4、基于所述各坐标点对应的材料移除率和预先设置的迭代参数,获取有效时间步长;
5、基于所述材料移除率和所述有效时间步长执行本次时间迭代,以仿真所述各坐标点在所述有效时间步长内的高度变化,获得所述晶圆上表面更新的形貌分布;
6、基于每次时间迭代后更新的形貌分布,按照上述步骤获取下一次时间迭代的材料移除率、有效时间步长并执行下一次时间迭代,直至所述晶圆上表面的平均高度达到预设阈值,所述平均高度基于更新后的形貌分布获取。
7、在其中的一些实施例中,所述基于所述各坐标点对应的材料移除率和预先设置的迭代参数,获取有效时间步长包括:
8、基于所述各坐标点对应的材料移除率和预先设置的迭代参数,获取本次时间迭代的最大时间步长;
9、将所述最大时间步长与预先设置的最小时间步长进行比较,在所述最大时间步长大于所述最小时间步长的情况下,基于所述最大时间步长确定所述有效时间步长;
10、在所述最大时间步长小于或等于所述最小时间步长的情况下,基于所述最小时间步长确定所述有效时间步长。
11、在其中的一些实施例中,所述基于所述各坐标点对应的材料移除率和预先设置的迭代参数,获取本次时间迭代的最大时间步长包括:
12、基于所述各坐标点对应的材料移除率的最大值、最小值和平均值,以及所述最小时间步长,获取本次时间迭代的最大移除量;
13、基于所述最大移除量和所述材料移除率的最大值,获取本次时间迭代的最大时间步长。
14、在其中的一些实施例中,所述基于所述各坐标点对应的材料移除率和预先设置的迭代参数,获取本次时间迭代的最大时间步长包括:
15、基于所述各坐标点对应的材料移除率的最大值,以及预先设置的最大移除量,获取本次时间迭代的最大时间步长。
16、在其中的一些实施例中,所述基于晶圆上表面的形貌分布和对应的材料参数,计算获得所述晶圆上表面各坐标点对应的材料移除率包括:
17、基于所述晶圆上表面的形貌分布进行空间迭代,获取稳定状态下所述晶圆上表面各坐标点对应的抛光垫形变量和抛光垫表面压力;
18、基于所述各坐标点对应的抛光垫形变量和抛光垫表面压力,计算获得所述各坐标点对应的接触压力;
19、基于所述各坐标点对应的接触压力和所述材料参数,获取所述各坐标点对应的材料移除率。
20、在其中的一些实施例中,所述基于每次时间迭代后获得的形貌分布,按照上述步骤获取下一次时间迭代的材料移除率包括:
21、基于本次时间迭代中获取的所述各坐标点对应的材料移除率,获取本次时间迭代的空间补偿值;
22、基于本次时间迭代中稳定状态下各坐标点对应的抛光垫形变量,以及所述空间补偿值,确定下一次时间迭代中各坐标点对应的抛光垫形变量的初始迭代值。
23、在其中的一些实施例中,所述基于本次时间迭代中获取的所述各坐标点对应的材料移除率,获取本次时间迭代的空间补偿值包括:
24、基于本次时间迭代中获取的所述各坐标点对应的材料移除率,获得所述各坐标点对应的材料移除量的最大值;
25、基于所述材料移除量的最大值,确定所述空间补偿值。
26、在其中的一些实施例中,所述基于本次时间迭代中稳定状态下各坐标点对应的抛光垫形变量,以及所述空间补偿值,确定下一次时间迭代中各坐标点对应的抛光垫形变量的初始迭代值包括:
27、将各坐标点对应的抛光垫形变量与所述空间补偿值相加,得到各坐标点对应的和值;
28、将所述和值与所述坐标点到参考平面的距离进行比较,在所述和值大于所述距离的情况下,基于所述距离确定下一次时间迭代的初始迭代值;
29、在所述和值小于或等于所述距离的情况下,基于所述和值确定下一次时间迭代的初始迭代值。
30、第二个方面,在本实施例中提供了一种自适应时间步长的晶圆抛光仿真装置,所述装置包括:
31、计算模块,用于基于晶圆上表面的形貌分布和材料参数,计算获得所述晶圆上表面各坐标点对应的材料移除率;
32、获取模块,用于基于所述各坐标点对应的材料移除率和预先设置的迭代参数,获取有效时间步长;
33、仿真模块,用于基于所述材料移除率和所述有效时间步长执行本次时间迭代,以仿真所述各坐标点在所述有效时间步长内的高度变化,获得所述晶圆上表面更新的形貌分布;
34、迭代模块,用于基于每次时间迭代后更新的形貌分布,按照上述步骤获取下一次时间迭代的材料移除率、有效时间步长并执行下一次时间迭代,直至所述晶圆上表面的平均高度达到预设阈值,所述平均高度基于更新后的形貌分布获取。
35、第三个方面,在本实施例中提供了一种可读存储介质,其上存储有程序,所述程序被处理器执行时实现第一个方面所述的自适应时间步长的晶圆抛光仿真方法的步骤。
36、与相关技术相比,在本实施例中提供的自适应时间步长的晶圆抛光仿真方法,通过基于晶圆上表面的形貌分布和对应的材料参数,计算获得晶圆上表面各坐标点对应的材料移除率,得到各坐标点在抛光过程中高度降低的速率;通过基于各坐标点对应的材料移除率和预先设置的迭代参数,获取有效时间步长,根据材料移除率的分布适当提高或降低时间步长,提高了仿真效率,避免了计算资源的浪费;通过基于材料移除率和有效时间步长执行本次时间迭代,获得晶圆上表面更新的形貌分布,通过仿真获取在该有效时间步长内晶圆上表面的抛光效果;通过基于每次时间迭代后更新的形貌分布,重复进行时间迭代,直至晶圆上表面的平均高度达到预设阈值,提高了整个仿真过程中的迭代效率,解决了相关技术中存在的形貌拓扑求解时仿真效率较低的问题。
37、本技术的一个或多个实施例的细节在以下附图和描述中提出,以使本技术的其他特征、目的和优点更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!