下肢力线的评估方法和装置、存储介质及电子设备与流程
本技术涉及数据处理,具体而言,涉及一种下肢力线的评估方法和装置、存储介质及电子设备。
背景技术:
1、膝关节是人体重要的关节之一,其生物力学特性对于维持正常的步态和关节功能至关重要。在膝关节置换术中,股骨和胫骨假体的旋转对线对于手术效果和患者预后具有重要影响。
2、下肢力线恢复,是膝关节诊疗术式的重要目标,也是评估下肢生物力学的重要参数,以减少关节磨损,减少患者疼痛,对于评估和改善患者步态、减少下肢关节病变以及手术规划等方面具有重要意义。然而,传统的力线恢复,往往主要基于二维x线片的平片估计,仅依靠静态矢状位与冠状位影像来进行评估,这严重影响了对下肢力线评估的准确性。
3、针对相关技术中基于二维x线片对下肢力线进行评估,导致对下肢力线评估的准确性比较低的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本技术的主要目的在于提供一种下肢力线的评估方法和装置、存储介质及电子设备,以解决相关技术中基于二维x线片对下肢力线进行评估,导致对下肢力线评估的准确性比较低的问题。
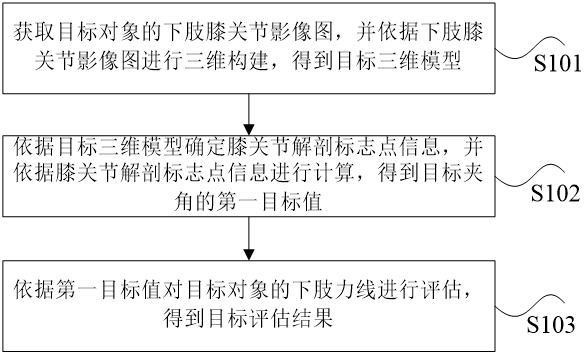
2、为了实现上述目的,根据本技术的一个方面,提供了一种下肢力线的评估方法。该方法包括:获取目标对象的下肢膝关节影像图,并依据所述下肢膝关节影像图进行三维构建,得到目标三维模型;依据所述目标三维模型确定膝关节解剖标志点信息,并依据膝关节解剖标志点信息进行计算,得到目标夹角的第一目标值,其中,所述目标夹角为以下至少之一:远端股骨角、股四头肌与髌腱纵轴的力线之间的夹角、胫股角、胫骨平台内倾角以及股骨后髁外旋角;依据所述第一目标值对所述目标对象的下肢力线进行评估,得到目标评估结果,其中,所述目标评估结果用于表征所述下肢力线是否符合预设要求。
3、进一步地,在所述目标夹角为所述胫股角时,依据膝关节解剖标志点信息进行计算,得到目标夹角的第一目标值包括:依据所述膝关节解剖标志点信息确定股骨近端点坐标和股骨远端点坐标;依据所述膝关节解剖标志点信息确定胫骨中心点坐标;依据所述股骨近端点坐标、所述股骨远端点坐标和所述胫骨中心点坐标进行计算,得到所述目标夹角的第一目标值。
4、进一步地,依据所述股骨近端点坐标、所述股骨远端点坐标和所述胫骨中心点坐标进行计算,得到所述目标夹角的第一目标值包括:依据所述股骨近端点坐标和所述股骨远端点坐标进行计算,得到第一距离值;依据所述胫骨中心点坐标和所述股骨近端点坐标进行计算,得到第二距离值;依据所述胫骨中心点坐标和所述股骨远端点坐标进行计算,得到第三距离值;依据所述第一距离值、所述第二距离值和所述第三距离值进行计算,得到所述目标夹角的第一目标值。
5、进一步地,依据所述第一目标值对所述目标对象的下肢力线进行评估,得到目标评估结果包括:依据所述目标三维模型确定股骨内外上髁连线、股骨后髁连线以及股骨滑车切迹的最低点与股骨髁间中点连线;依据所述股骨内外上髁连线、所述股骨后髁连线和所述股骨滑车切迹的最低点与股骨髁间中点连线对所述目标对象的下肢力线进行评估,得到第一评估结果;依据所述第一目标值对所述目标对象的下肢力线进行评估,得到第二评估结果;依据所述第一评估结果和所述第二评估结果,确定所述目标评估结果。
6、进一步地,在依据所述第一目标值对所述目标对象的下肢力线进行评估,得到目标评估结果之后,所述方法还包括:若所述目标评估结果表征所述下肢力线不符合所述预设要求,则依据所述目标三维模型,确定角度旋转范围;依据所述角度旋转范围对所述目标三维模型中的胫腓骨进行旋转复位,以使所述下肢力线符合所述预设要求。
7、进一步地,依据所述目标三维模型,确定角度旋转范围包括:依据所述目标三维模型确定目标点的坐标信息,其中,所述目标点包括股骨近端点、股骨远端点、胫骨近端点和胫骨远端点;依据所述目标点的坐标信息对胫骨相对股骨的三维旋转角度进行计算,得到股胫旋转角对应的第二目标值;依据所述第二目标值确定所述角度旋转范围。
8、进一步地,依据所述目标点的坐标信息对胫骨相对股骨的三维旋转角度进行计算,得到股胫旋转角对应的第二目标值包括:依据所述目标点的坐标信息,确定股骨解剖轴线和胫骨解剖轴线;依据所述股骨解剖轴线和所述胫骨解剖轴线对胫骨相对股骨的三维旋转角度进行计算,得到所述第二目标值。
9、进一步地,依据所述角度旋转范围对所述目标三维模型中的胫腓骨进行旋转复位,以使所述下肢力线符合所述预设要求包括:依据所述目标三维模型确定髌骨横轴和腓骨力线,并依据所述髌骨横轴和所述腓骨力线构建目标坐标系;在所述目标坐标系下,依据胫踝机械轴线确定所述胫腓骨的旋转轴,以及依据胫腓横断面的逆时针方向确定所述胫腓骨的旋转方向;依据所述角度旋转范围、所述旋转轴和旋转方向对所述目标三维模型中的胫腓骨进行旋转,以使所述下肢力线符合所述预设要求。
10、为了实现上述目的,根据本技术的另一方面,提供了一种下肢力线的评估装置。该装置包括:获取单元,用于获取目标对象的下肢膝关节影像图,并依据所述下肢膝关节影像图进行三维构建,得到目标三维模型;第一确定单元,用于依据所述目标三维模型确定膝关节解剖标志点信息,并依据膝关节解剖标志点信息进行计算,得到目标夹角的第一目标值,其中,所述目标夹角为以下至少之一:远端股骨角、股四头肌与髌腱纵轴的力线之间的夹角、胫股角、胫骨平台内倾角以及股骨后髁外旋角;评估单元,用于依据所述第一目标值对所述目标对象的下肢力线进行评估,得到目标评估结果,其中,所述目标评估结果用于表征所述下肢力线是否符合预设要求。
11、进一步地,在所述目标夹角为所述胫股角时,第一确定单元包括:第一确定模块,用于依据所述膝关节解剖标志点信息确定股骨近端点坐标和股骨远端点坐标;第二确定模块,用于依据所述膝关节解剖标志点信息确定胫骨中心点坐标;第一计算模块,用于依据所述股骨近端点坐标、所述股骨远端点坐标和所述胫骨中心点坐标进行计算,得到所述目标夹角的第一目标值。
12、进一步地,第一计算模块包括:第一计算子模块,用于依据所述股骨近端点坐标和所述股骨远端点坐标进行计算,得到第一距离值;第二计算子模块,用于依据所述胫骨中心点坐标和所述股骨近端点坐标进行计算,得到第二距离值;第三计算子模块,用于依据所述胫骨中心点坐标和所述股骨远端点坐标进行计算,得到第三距离值;第四计算子模块,用于依据所述第一距离值、所述第二距离值和所述第三距离值进行计算,得到所述目标夹角的第一目标值。
13、进一步地,评估单元包括:第三确定模块,用于依据所述目标三维模型确定股骨内外上髁连线、股骨后髁连线以及股骨滑车切迹的最低点与股骨髁间中点连线;第一评估模块,用于依据所述股骨内外上髁连线、所述股骨后髁连线和所述股骨滑车切迹的最低点与股骨髁间中点连线对所述目标对象的下肢力线进行评估,得到第一评估结果;第二评估模块,用于依据所述第一目标值对所述目标对象的下肢力线进行评估,得到第二评估结果;第四确定模块,用于依据所述第一评估结果和所述第二评估结果,确定所述目标评估结果。
14、进一步地,所述装置还包括:第二确定单元,用于在依据所述第一目标值对所述目标对象的下肢力线进行评估,得到目标评估结果之后,若所述目标评估结果表征所述下肢力线不符合所述预设要求,则依据所述目标三维模型,确定角度旋转范围;复位单元,用于依据所述角度旋转范围对所述目标三维模型中的胫腓骨进行旋转复位,以使所述下肢力线符合所述预设要求。
15、进一步地,第二确定单元包括:第五确定模块,用于依据所述目标三维模型确定目标点的坐标信息,其中,所述目标点包括股骨近端点、股骨远端点、胫骨近端点和胫骨远端点;第二计算模块,用于依据所述目标点的坐标信息对胫骨相对股骨的三维旋转角度进行计算,得到股胫旋转角对应的第二目标值;第六确定模块,用于依据所述第二目标值确定所述角度旋转范围。
16、进一步地,第二计算模块包括:确定子模块,用于依据所述目标点的坐标信息,确定股骨解剖轴线和胫骨解剖轴线;第四计算子模块,用于依据所述股骨解剖轴线和所述胫骨解剖轴线对胫骨相对股骨的三维旋转角度进行计算,得到所述第二目标值。
17、进一步地,复位单元包括:构建模块,用于依据所述目标三维模型确定髌骨横轴和腓骨力线,并依据所述髌骨横轴和所述腓骨力线构建目标坐标系;第七确定模块,用于在所述目标坐标系下,依据胫踝机械轴线确定所述胫腓骨的旋转轴,以及依据胫腓横断面的逆时针方向确定所述胫腓骨的旋转方向;旋转模块,用于依据所述角度旋转范围、所述旋转轴和旋转方向对所述目标三维模型中的胫腓骨进行旋转,以使所述下肢力线符合所述预设要求。
18、为了实现上述目的,根据本技术的一方面,提供了一种计算机可读存储介质,所述存储介质存储程序,其中,在所述程序运行时控制所述存储介质所在设备执行上述任意一项所述的下肢力线的评估方法。
19、为了实现上述目的,根据本技术的另一个方面,还提供了一种电子设备,电子设备包括一个或多个处理器和存储器,存储器用于存储一个或多个处理器实现上述任意一项所述的下肢力线的评估方法。
20、通过本技术,采用以下步骤:获取目标对象的下肢膝关节影像图,并依据下肢膝关节影像图进行三维构建,得到目标三维模型;依据目标三维模型确定膝关节解剖标志点信息,并依据膝关节解剖标志点信息进行计算,得到目标夹角的第一目标值,其中,目标夹角为以下至少之一:远端股骨角、股四头肌与髌腱纵轴的力线之间的夹角、胫股角、胫骨平台内倾角以及股骨后髁外旋角;依据第一目标值对目标对象的下肢力线进行评估,得到目标评估结果,其中,目标评估结果用于表征下肢力线是否符合预设要求,解决了相关技术中基于二维x线片对下肢力线进行评估,导致对下肢力线评估的准确性比较低的问题。在本方案中,通过下肢膝关节影像图构建三维模型,开展立体分析,通过目标三维模型确定膝关节解剖标志点信息,然后根据解剖标志点信息计算出远端股骨角、股四头肌与髌腱纵轴的力线之间的夹角、胫股角、胫骨平台内倾角以及股骨后髁外旋角等目标夹角的第一目标值,最后根据第一目标值对下肢力线进行评估,进而达到了提高对下肢力线评估的准确性的效果。
- 还没有人留言评论。精彩留言会获得点赞!