一种基于高速公路的车辆识别方法与流程
本技术涉及交通管理,尤其涉及一种基于高速公路的车辆识别方法。
背景技术:
1、传统的高速公路管理和监控系统主要依赖于人工巡逻和手动收费,存在效率低下、容易出错和误判等问题。随着人工智能和计算机视觉技术的发展,基于图像识别的自动化管理系统成为可能,并逐步实现了自动化收费。
2、目前,基于深度学习的车辆图像识别方法,可以实现对车辆类型、车辆颜色和车牌号码等信息的识别,但这些技术往往无法应对光照变化和天气因素对车辆图像识别的影响,导致车辆图像识别结果不准确。
技术实现思路
1、本技术实施例提供一种基于高速公路的车辆识别方法,用于解决高速公路上车辆识别准确率低的问题。
2、本技术实施例采用下述技术方案:
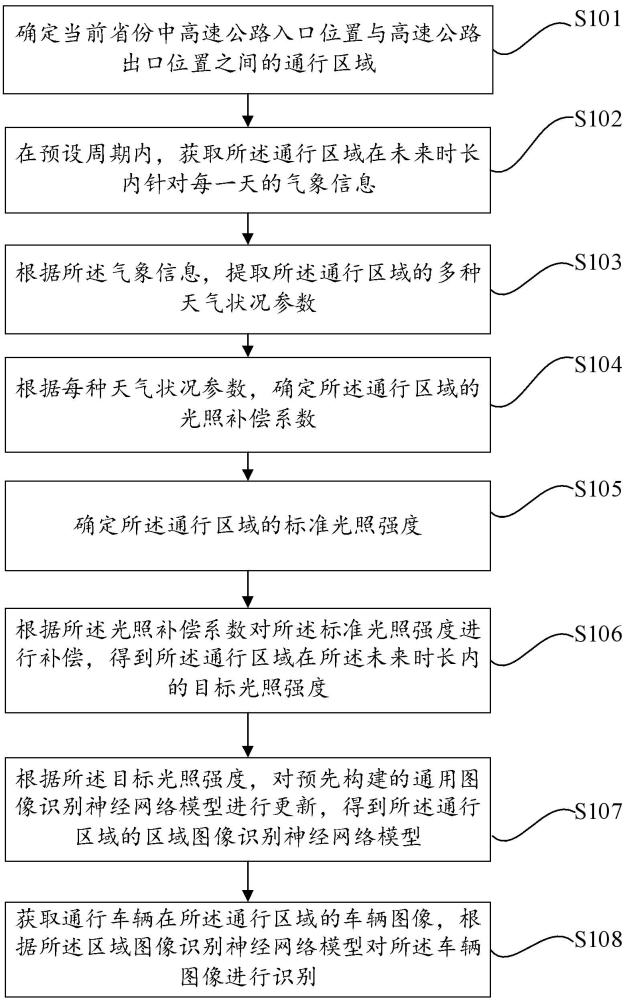
3、一方面,本技术实施例提供了一种基于高速公路的车辆识别方法,该方法包括:确定当前省份中高速公路入口位置与高速公路出口位置之间的通行区域;在预设周期内,获取所述通行区域在未来时长内针对每一天的气象信息;根据所述气象信息,提取所述通行区域的多种天气状况参数;每种天气状况参数分别包括在未来时长内针对每一天的状况参数值;根据每种天气状况参数,确定所述通行区域的光照补偿系数;确定所述通行区域的标准光照强度;根据所述光照补偿系数对所述标准光照强度进行补偿,得到所述通行区域在所述未来时长内的目标光照强度;根据所述目标光照强度,对预先构建的通用图像识别神经网络模型进行更新,得到所述通行区域的区域图像识别神经网络模型;获取通行车辆在所述通行区域的车辆图像,根据所述区域图像识别神经网络模型对所述车辆图像进行识别。
4、一个示例中,所述根据每种天气状况参数,确定所述通行区域的光照补偿系数,具体包括:获取通行区域的多种样本天气状况参数以及所述通行区域在每种样本天气状况参数下的对应样本补偿光照强度;确定用于描述每种样本天气状况参数与对应样本补偿光照强度之间的初始关系模型;根据每种样本天气状况参数与对应样本补偿光照强度,对所述初始关系模型的未知参数进行拟合,得到每种样本天气状况参数下的对应目标关系模型;若所述通行区域包括多个地区,针对每个地区,对每种天气状况参数在未来时长内的多个状况参数值进行求取平均值,得到每个地区针对每种天气状况参数的状况参数值;将每个地区针对每种状况参数的参数值进行求取平均值,得到所述通行区域针对每种天气状况参数的状况参数值;将通行区域针对每种天气状况参数的状况参数值分别输入各自的对应目标关系模型,得到每种天气状况参数的补偿光照强度;对所述每种天气状况参数的补偿光照强度进行求取均值,得到所述通行区域的补偿光照强度;在预先构建的映射关系表中,对所述补偿光照强度进行匹配,得到所述通行区域的光照补偿系数;在补偿光照强度小于预设阈值时,所述光照补偿系数大于0且小于1,在补偿光照强度大于或等于预设阈值时,所述光照补偿系数大于1。
5、一个示例中,所述确定用于描述样本天气状况参数与样本补偿光照强度之间的初始关系模型,具体包括:根据云量与对应样本补偿光照强度之间呈现负相关关系,确定用于描述云量与对应样本补偿光照强度之间的线性模型;根据降雨量与对应样本补偿光照强度之间呈现指数关系,确定用于描述降雨量与对应样本补偿光照强度之间的指数模型;根据雾霾指数与对应样本补偿光照强度之间呈现对数关系,确定用于描述雾霾指数与对应样本补偿光照强度之间的对数模型。
6、一个示例中,所述线性模型的表达式如下:其中,为云量的对应样本补偿光照强度,为云量,为常数参数,为常数参数;所述指数模型的表达式如下:其中,为降雨量的对应样本补偿光照强度,为降雨量,c为常数参数,为常数参数;所述对数模型的表达式如下:其中,为雾霾指数的对应样本补偿光照强度,为雾霾指数,e为常数参数,f为常数参数。
7、一个示例中,所述确定所述通行区域的标准光照强度,具体包括:获取所述通行区域的日出时间和日落时间;在所述日出时间与所述日落时间之间的第一时间段内,确定所述通行区域的第一标准光照强度;在所述日落时间之后以及所述日出时间之前的第二时间段内,确定所述通行区域的第二标准光照强度;所述第一标准光照强度高于所述第二标准光照强度;所述根据所述光照补偿系数对所述标准光照强度进行补偿,得到所述通行区域在所述未来时长内的目标光照强度,具体包括:将所述光照补偿系数与所述第一标准光照强度进行相乘,得到所述通行区域在所述未来时长内的第一目标光照强度;将所述光照补偿系数与所述第二标准光照强度进行相乘,得到所述通行区域在所述未来时长内的第二目标光照强度。
8、一个示例中,所述根据所述目标光照强度,对预先构建的通用图像识别神经网络模型进行更新,得到所述通行区域的区域图像识别神经网络模型,具体包括:获取所述通行区域在历史周期内的历史车辆图像,以及所述历史车辆图像的识别标注信息;根据图像拍摄时间,对所述历史车辆图像进行划分,得到所述第一时间段内的第一历史车辆图像,以及所述第二时间段内的第二历史车辆图像;根据所述第一目标光照强度,对所述第一历史车辆图像的亮度进行调整,得到第一目标历史车辆图像;根据所述第二目标光照强度,对所述第二历史车辆图像的亮度进行调整,得到第二目标历史车辆图像;根据所述第一目标历史车辆图像以及所述第一目标历史车辆图像的识别标注信息,对所述通用图像识别神经网络模型进行训练,得到第一目标图像识别神经网络模型;根据所述第二目标历史车辆图像以及所述第二目标历史车辆图像的识别标注信息,对所述通用图像识别神经网络模型进行训练,得到第二目标图像识别神经网络模型;根据所述第一目标图像识别神经网络模型与所述第二目标图像识别神经网络模型,得到所述通行区域的区域图像识别神经网络模型。
9、一个示例中,所述根据所述区域图像识别神经网络模型对所述车辆图像进行识别,具体包括:确定所述车辆图像的拍摄时间;判断所述拍摄时间是否处于所述第一时间段内;若是,则调用第一目标图像识别神经网络模型,对所述车辆图像进行识别;若否,则调用第二目标图像识别神经网络模型,对所述车辆图像进行识别。
10、一个示例中,所述方法还包括:获取通行车辆在高速公路入口位置的车辆驶入图像;将所述车辆驶入图像输入所述区域图像识别神经网络模型,得到所述通行车辆的驶入车辆特征;所述驶入车辆特征包括车辆类型、车辆颜色、车牌号码;在车辆画像数据库中,对所述驶入车辆特征进行匹配;若匹配成功,将匹配的车辆画像确定为所述通行车辆的目标车辆画像;在所述目标车辆画像中,获取所述通行车辆的历史通行记录;判断所述历史通行记录中是否具有包括所述高速公路入口位置的目标通行记录;若是,则根据所述目标通行记录,预测所述通行车辆在本次通行的高速公路出口位置,得到理论预测出口位置;为所述通行车辆建立本次通行的车辆图像序列,将所述车辆驶入图像输出至所述车辆图像序列,将所述理论预测出口位置与所述驶入车辆特征确定为所述车辆图像序列的序列标签。
11、一个示例中,所述将所述理论预测出口位置与所述驶入车辆特征确定为所述车辆图像序列的序列标签之后,所述方法还包括:接收所述通行车辆在收费自助车道的收费请求;获取所述通行车辆在高速公路出口位置的车辆驶出图像;根据所述区域图像识别神经网络模型对所述车辆驶出图像进行识别,得到所述通行车辆的驶出车辆特征;所述驶出车辆特征包括车辆类型、车辆颜色、车牌号码;根据所述驶出车辆特征,查找所述通行车辆的车辆图像序列;若查找成功,则判断所述高速公路出口位置与所述理论预测出口位置是否一致;若是,则根据所述高速公路出口位置与所述高速公路入口位置、所述车辆驶出图像的时间戳与所述车辆驶入图像的时间戳,确定所述通行车辆的收费金额。
12、一个示例中,所述方法还包括:若所述高速公路出口位置与所述理论预测出口位置不一致,则将所述车辆驶出图像发送至管理用户终端;接收所述管理用户终端上传的驶出标注特征;将所述驶出标注特征与所述驶出车辆特征进行比对;若比对一致,则确定所述车辆驶出图像与所述车辆驶入图像识别正确;若比对不一致,则确定所述车辆驶出图像与所述车辆驶入图像识别错误。
13、本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:
14、通过获取通行区域在未来时长内的气象信息,并提取多种天气状况参数,可以了解不同天气条件下通行区域的光照强度、能见度等影响图像识别的因素。
15、此外,根据天气状况参数,确定光照补偿系数,以便在不同天气条件下对图像进行准确识别。
16、此外,通过确定通行区域的光照补偿系数,可以根据不同天气条件下的光照强度对标准光照强度进行补偿。这有助于在不同光照条件下提高图像的可见度和质量,从而增加图像识别的准确性。
17、此外,根据目标光照强度,对预先构建的通用图像识别神经网络模型进行更新,得到适应不同光照条件的区域图像识别神经网络模型,实现了基于区域特点,为各区域个性化定制图像识别神经网络模型,可以提高模型的泛化能力和适应性,使其在不同天气条件下对车辆图像进行更准确的识别。
18、综上所述,通过综合考虑气象参数、光照补偿和更新图像识别模型等因素,可以提高通行区域车辆图像的识别准确性。
- 还没有人留言评论。精彩留言会获得点赞!