一种基于视觉算法的芯片烧录定位矫正方法和系统与流程
本发明涉及芯片烧录定位,具体为一种基于视觉算法的芯片烧录定位矫正方法和系统。
背景技术:
1、芯片烧录是集成电路制造过程中的一项关键步骤,其中定位技术扮演着至关重要的角色。在芯片烧录的背景下,定位技术通过精确地确定芯片上的特定位置,对焊盘或其他关键元件进行定位,从而确保烧录过程的准确性、稳定性和成功率。
2、首先,考虑到现代集成电路设计和制造的高度复杂性,芯片上的元件密度相较之前显著增加。因此,定位技术在芯片烧录中的作用变得更为重要。它允许在微米级别准确地定位焊点或其他需要烧录的区域,确保每个元件都被正确编程,从而避免了由于元件位置偏差而引发的功能故障。随着电子产品日益小型化和高度集成,芯片上的焊点数量也相应增加。在这种情况下,传统的手动烧录方法已经无法满足生产需求。自动化烧录系统的引入使得定位技术变得尤为关键,因为它需要在高速生产线上准确、快速地定位并烧录每个芯片。
3、传统的芯片烧录定位矫正方法通常存在一些问题,例如在面对不同环境条件下难以适应,无法实时监测并调整矫正参数,以及在芯片布局发生变化时缺乏有效的定位手段。这些问题导致了烧录准确性和效率的降低。在传统技术中,矫正任务往往是静态的,无法根据实时环境变化进行动态调整。此外,常规的烧录定位方法往往对芯片布局的变化较为敏感,缺乏对不同环境条件下芯片定位的鲁棒性。
技术实现思路
1、(一)解决的技术问题:针对现有技术的不足,本发明提供了一种基于视觉算法的芯片烧录定位矫正方法和系统,以解决背景技术中提到的问题。
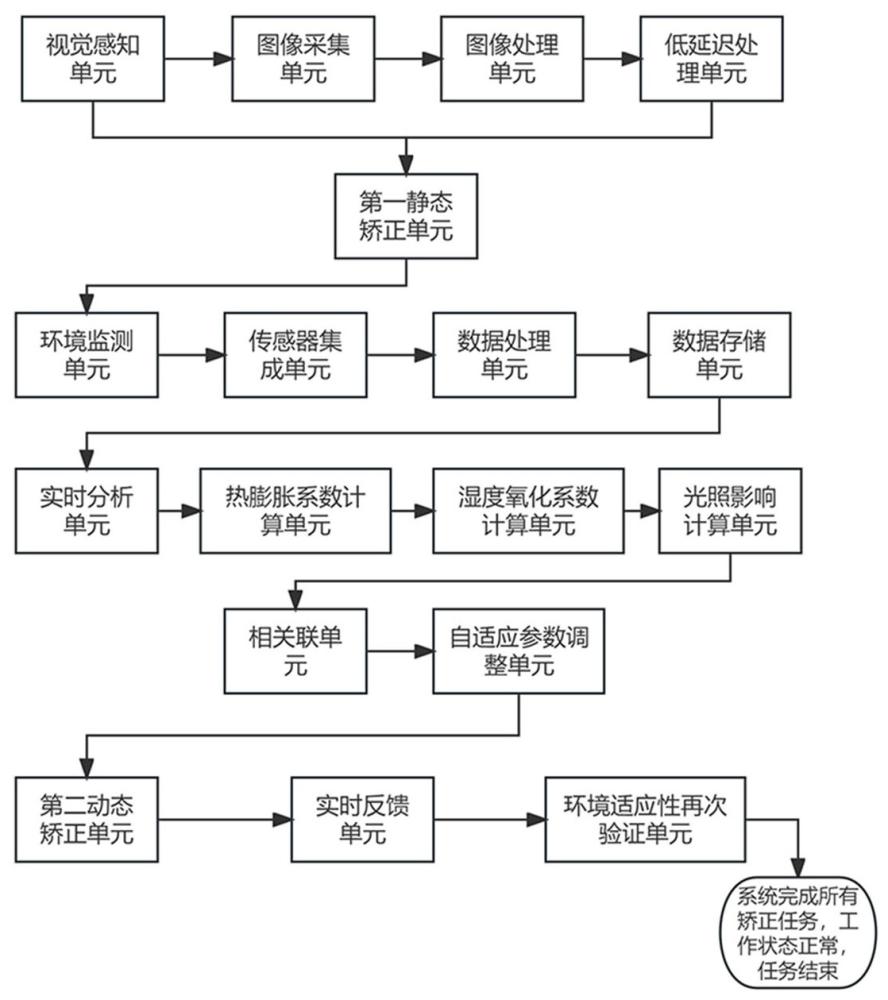
2、(二)技术方案:为实现以上目的,本发明通过以下技术方案予以实现:一种基于视觉算法的芯片烧录定位矫正系统,包括视觉感知单元、第一静态矫正单元、环境监测单元、实时分析单元和第二动态矫正单元;
3、所述视觉感知单元用于采用高分辨率相机和先进的图像处理算法,实时捕捉芯片表面的图像数据,并进行特征提取和匹配算法确定芯片上关键元件的位置;
4、第一静态矫正单元用于建立视觉算法模型,包括卷积神经网络或支持向量机其中一种,根据视觉感知单元的输出,执行第一矫正任务,将芯片的粗略位置调整到目标位置;考虑到芯片布局变化,进行定位和初步矫正;
5、所述第一静态矫正单元执行第一矫正任务的具体流程为:
6、s1、打开芯片监测开关,监测模板与芯片是否匹配成功;
7、s2、匹配成功后,获取新获取定标芯片图像模板的y坐标;
8、s3、运算获取第一矫正任务的纠偏值jpz,新的模板y坐标减去初始模板y坐标,获取纠偏值jpz;
9、s4、集合纠偏值jpz的结果,移动定位装置的初步矫正定位;
10、所述环境监测单元用于集成温度、湿度、光照传感器,监测烧录环境的实时状态,以检测影响烧录准确性的实时采集环境数据,建立实时环境数据集;
11、所述实时分析单元用于根据实时环境数据,分析计算获得:热膨胀系数rpz、湿度氧化系数sdx和光照影响系数gzx,并将热膨胀系数rpz、湿度氧化系数sdx和光照影响系数gzx相关联获得实时环境系数hjx,并根据实时环境系数hjx的值,动态调整第一矫正任务的参数,以适应不同环境条件;
12、所述第二动态矫正单元用于基于实时环境系数hjx和第一矫正任务的结果,执行第二矫正任务,对芯片的微调位置进行第二次调整。
13、优选的,所述视觉感知单元包括图像采集单元、图像处理单元和低延迟处理单元;
14、所述图像采集单元用于采用高分辨率相机用于捕捉芯片表面的图像数据,建立芯片图像数据集;
15、所述图像处理单元用于对芯片图像数据集进行预处理,包括去噪、白平衡、色彩矫正和帧率统一后,并执行特征提取操作,识别图像中与芯片元件的位置特征,位置特征包括边缘、角点、纹理、x坐标和y坐标;并进行模板匹配,匹配成功后,确定芯片元件的位置在模板上以坐标数据进行显示;
16、所述低延迟处理单元用于采用图像处理硬件和固态星盘进行读取和写入,减少i/o等待时间。
17、优选的,所述第一静态矫正单元具体流程如下:
18、s1、打开芯片监测开关,监测模板与芯片是否匹配成功:
19、s11、输入:获取芯片表面的图像数据,同时使用预定义的模板图像;
20、s12、处理:使用图像处理算法进行模板匹配,包括使用相关性匹配或特征匹配方法;
21、s13、输出:判断模板与芯片是否匹配成功,得到匹配结果;
22、s2、匹配成功后,获取新获取定标芯片图像模板的y坐标:
23、s21、条件判断:如果模板与芯片匹配成功;
24、s22、获取y坐标:从匹配结果中提取新获取定标芯片图像模板的y坐标;
25、s3、运算获取第一矫正任务的纠偏值jpz;
26、s31、获取初始模板y坐标:从系统记录中获取初始模板的y坐标;
27、s32、运算纠偏值:计算纠偏值jpz,即新的模板y坐标减去初始模板y坐标;
28、s4、集合纠偏值jpz的结果,移动定位装置的初步矫正定位:
29、s41、纠偏值集合:将计算得到的纠偏值jpz集合;
30、s42、移动定位装置:使用集合的纠偏值jpz,调整定位装置,完成芯片的初步矫正定位。
31、优选的,所述环境监测单元包括传感器集成单元、数据处理单元和数据存储单元;
32、所述传感器集成单元用于集成温度传感器、湿度传感器和光照传感器,实时获取烧录环境的温度值t、湿度值sdz和光照强度值gzqdz;
33、数据处理单元用于设置固定的采样频率,定时从各个传感器获取烧录环境的温度值t、湿度值sdz和光照强度值gzqdz;并对采集的数据进行去噪、滤波和归一化处理;
34、所述数据存储单元用于将处理后的实时环境数据存储在日志文件数据库中,建立实时环境数据集。
35、优选的,所述实时分析单元包括热膨胀系数计算单元、湿度氧化系数计算单元和光照影响计算单元;
36、所述热膨胀系数计算单元用于采集芯片初始长度l0,获取温度t变化值,记录为δt,并获取芯片的长度变化值δl,计算获取热膨胀系数rpz:
37、,
38、所述湿度氧化系数计算单元用于采集芯片初始氧化面积mj、氧化反应速率sl和当前湿度值sdz,由以下公式计算生成湿度氧化系数sdx:
39、,
40、式中,a表示修正常数值;
41、所述光照影响计算单元用于采用光照模型通过非线性影响计算获得光照影响系数gzx,所述光照影响系数gzx通过以下公式计算获得:
42、,
43、式中,gzqdz表示光照强度值,这一项体现非线性的光照影响关系,d控制了非线性的程度,e则是模型的偏移项,α表示控制光照影响系数gzx随光照强度变化的斜率,较大的值表示对光照强度的变化更为敏感;b表示光照强度的偏移,b值表示在光照强度为零时,光照影响系数gzx的基准值,反映了在较低光照条件下系统的基础性能;c表示光照强度的缩放因子。
44、优选的,所述实时分析单元还包括相关联单元;
45、所述相关联单元用于依据热膨胀系数rpz、湿度氧化系数sdx和光照影响系数gzx进行相关联,由以下公式生成实时环境系数hjx:
46、,
47、式中,w1、w2和w3表示为热膨胀系数rpz、湿度氧化系数sdx和光照影响系数gzx的权重值,且0<w1<1,0<w2<1,0<w3<1,w1+w2+w3=1。
48、优选的,所述实时分析单元还包括自适应参数调整单元;
49、所述自适应参数调整单元用于将实时环境系数hjx与第一预设阈值q1和第二预设阈值q2进行对比,且第一预设阈值q1<第二预设阈值q2;获得第一评估结果和第二评估结果,包括:
50、如果hjx≥q1但hjx<q2,则第一评估结果为正,表示系统需要进行适应性调整;具体包括调整矫正任务的灵敏度和步进值;具体包括初始灵敏度s1和初始步进值i1是系统一开始的灵敏度和步进值;如果第一评估结果为正,调整灵敏度s2=s1*0.8;步进值为i2=i1*0.5;
51、如果hjx小于q1,则表示当前实时环境合格,不需要进行适应性调整;
52、如果hjx≥q2,则表示第二评估结果为正,表示系统需要进行大幅度的适应性调整,如果第二评估结果为正,调整灵敏度s2=s1*1.5;步进值为i2=i1*2。
53、优选的,所述第二动态矫正单元执行第二矫正任务的具体流程包括:
54、s5、获取第一评估结果和第二评估结果:从自适应参数调整单元获取第一评估结果和第二评估结果,如果第一评估结果为正,表示系统需要进行适应性调整,获取灵敏度s2和步进值i2;如果第一评估结果为负,或者第一评估结果为正但第二评估结果为负,说明系统不需要或者不宜进行适应性调整,流程结束;
55、s6、根据获取的第一评估结果和第二评估结果,决定是否执行第二矫正任务;如果需要进行适应性调整,则执行第二矫正任务;
56、s7、基于第一矫正任务的结果和调整后的参数s2和i2,计算需要微调的位置和调整幅度;使用计算出的微调位置和调整幅度,执行对芯片的第二次微调。
57、优选的,所述第二动态矫正单元还包括实时反馈单元和环境适应性再次验证单元;
58、所述实时反馈单元用于实时监控第二矫正任务的执行过程,确保微调操作对芯片位置的影响符合预期,并提供实时反馈,以便操作员了解系统的工作状态;
59、所述环境适应性再次验证单元用于在第二矫正任务执行后,重新验证实时环境系数hjx是否仍然符合适应性调整的条件,如果环境系数hjx继续变化,进一步的适应性调整灵敏度和步进值。
60、一种基于视觉算法的芯片烧录定位矫正方法,包括以下步骤:
61、步骤一、初始化:启动系统,并初始化所有硬件和算法模型;
62、步骤二、视觉感知:通过高分辨率相机采集芯片表面的图像数据;利用图像处理算法进行去噪、白平衡、色彩矫正和帧率统一;运用特征提取和匹配算法确定芯片上关键元件的位置;
63、步骤三、第一静态矫正:利用卷积神经网络或支持向量机算法建立视觉算法模型;执行第一矫正任务,将芯片的粗略位置调整到目标位置;考虑芯片布局变化,进行定位和初步矫正;
64、步骤四、环境监测:集成温度、湿度、光照传感器,实时监测烧录环境的状态;采集环境数据,包括温度值t、湿度值sdz和光照强度值gzqdz,建立实时环境数据集;
65、步骤五、实时分析:根据实时环境数据,计算热膨胀系数rpz、湿度氧化系数sdx和光照影响系数gzx;利用相关联单元生成实时环境系数hjx;根据hjx的值,动态调整第一矫正任务的参数;
66、步骤六、自适应参数调整:将hjx与预设阈值q1和q2进行对比,得到第一评估结果和第二评估结果;根据评估结果,调整矫正任务的灵敏度和步进值;
67、步骤七、第二动态矫正:获取第一评估结果和第二评估结果,确定是否执行第二矫正任务;如果需要适应性调整,则执行第二矫正任务;计算微调位置和调整幅度,执行对芯片的第二次微调;
68、步骤八、实时反馈和环境适应性验证:实时监控第二矫正任务的执行过程,提供实时反馈;在任务执行后,重新验证hjx是否仍符合适应性调整条件,如果需要,进行进一步的适应性调整;系统完成所有矫正任务,工作状态正常,任务结束。
69、(三)有益效果:本发明提供了一种基于视觉算法的芯片烧录定位矫正方法和系统。具备以下有益效果:
70、(1)通过视觉感知单元采用高分辨率相机和图像处理算法,系统能够实时捕捉芯片表面的图像数据,执行特征提取和匹配算法,确保对关键元件位置的准确性定位。第一静态矫正单元建立视觉算法模型,通过卷积神经网络或支持向量机进行第一次矫正任务,提高了粗略位置的调整准确性。
71、(2)环境监测单元集成温度、湿度、光照传感器,实时监测烧录环境状态。实时分析单元根据实时环境数据计算热膨胀系数、湿度氧化系数和光照影响系数,动态调整第一矫正任务的参数。这使系统能够在不同的环境条件下适应性地调整,提高了系统的稳定性和鲁棒性。
72、(3)自适应参数调整单元根据实时环境系数和预设阈值进行对比,调整矫正任务的灵敏度和步进值。这种自适应性使系统在面对不同的环境变化时能够灵活调整参数,保持高效性和准确性。
73、(4)第二动态矫正单元包括实时反馈单元,实时监控第二矫正任务的执行过程,提供实时反馈。这有助于操作员了解系统的工作状态,及时发现问题并采取必要的措施,提高了系统的可维护性和可操作性。
- 还没有人留言评论。精彩留言会获得点赞!