光纤陀螺测量数据自适应去噪方法、装置、设备及介质
本发明属于光纤陀螺数据处理,具体而言涉及一种光纤陀螺测量数据自适应去噪方法、装置、设备及介质。
背景技术:
1、光纤陀螺在顶管惯性导向系统中对顶管机的姿态角进行实时测量,但在实际应用过程中,由于顶管机刀盘转动需要大型电机和变压器进行驱动,会造成光纤陀螺测量数据包含很大的噪声,对测量精度产生影响。
2、常用的光纤陀螺随机去噪方法包括数字低通滤波器、时间序列分析法和小波滤波等方法。上述去噪方法中,低通滤波器主要依赖于带宽的选择,过窄时会损失有效信号,过宽时会造成去噪效果差。基于时间序列的分析方法包括均值滤波、滑动平均滤波、卡尔曼滤波和神经网络降噪等,但该方法存在时频分辨率低的问题,不适用非平稳信号。小波去噪也是去除随机噪声的有效方法,需要进行傅里叶变换无法满足实时去噪要求,去噪效果依赖小波基的选择。提升小波变换是第二代小波变换,摆脱了傅里叶变换的束缚,通过预测算子与更新算子进行分解,但对噪声不具有自适应性。
3、综上,现有技术中对于光线陀螺去噪方法存在自适应性差的问题需要解决。
技术实现思路
1、鉴于上述的分析,本发明实施例为了解决现有技术中对于光线陀螺去噪方法存在自适应性差的问题。
2、本发明提供一种光纤陀螺测量数据自适应去噪方法,包括以下步骤:
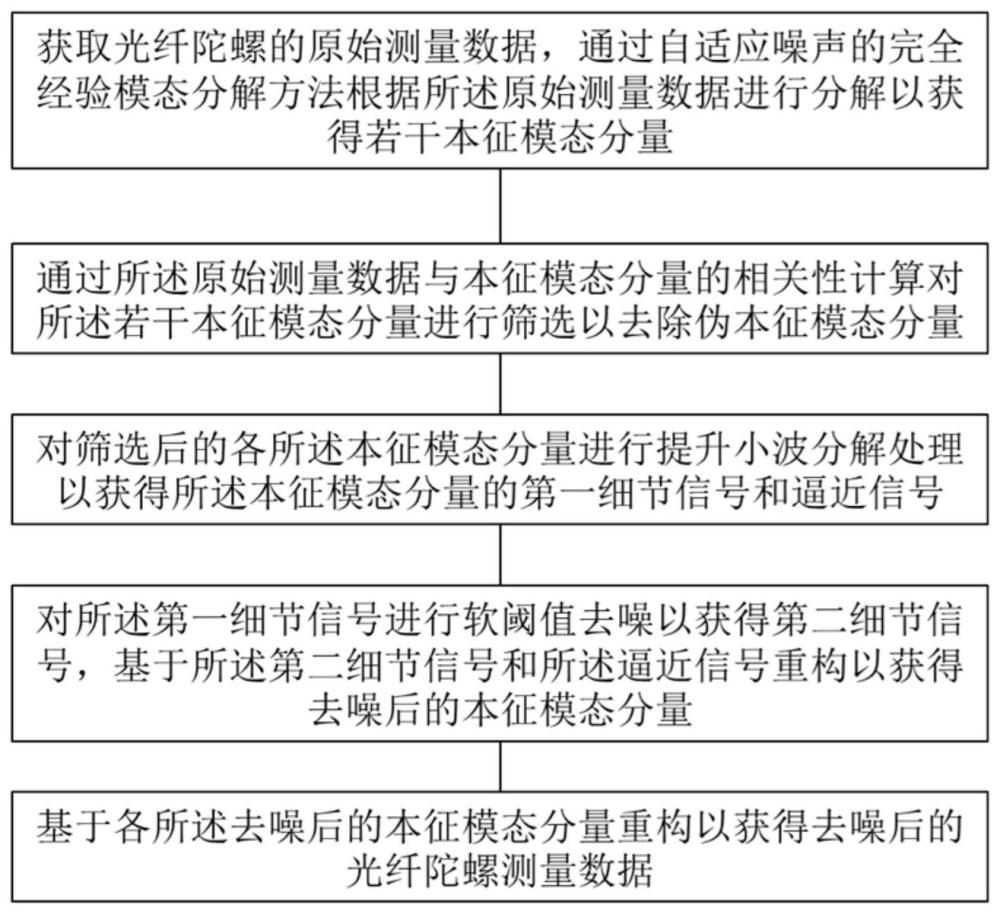
3、s1、获取光纤陀螺的原始测量数据,通过自适应噪声的完全经验模态分解方法根据所述原始测量数据进行分解以获得若干本征模态分量;
4、s2、通过所述原始测量数据与本征模态分量的相关性计算对所述若干本征模态分量进行筛选以去除伪本征模态分量;
5、s3、对筛选后的各所述本征模态分量进行提升小波分解处理以获得所述本征模态分量的第一细节信号和逼近信号;
6、s4、对所述第一细节信号进行软阈值去噪以获得第二细节信号,基于所述第二细节信号和所述逼近信号重构以获得去噪后的本征模态分量;
7、s5、基于各所述去噪后的本征模态分量重构以获得去噪后的光纤陀螺测量数据。
8、在一些实施例中,步骤s1中,通过自适应噪声的完全经验模态分解方法根据所述原始测量数据进行分解以获得若干本征模态分量,包括:
9、s11、在所述原始测量数据中加入白噪声,表示为:
10、si(t)=s(t)+ni(t),其中s(t)表示原始测量数据,ni(t)表示第i次加入的白噪声,si(t)表示第i此加入白噪声获得数据,i=1,2…,n,n为加入白噪声的次数;
11、s12、对si(t)进行经验模态分解以获得第一阶本征模态分量,分解方法表示为:
12、其中imf1表示第一阶本征模态分量,m(·)是满足imf筛选阈值的包络线的局部平均值;
13、s13、基于所述第一阶本征模态分量和原始测量数据获得第一残差,第一残差表示为:
14、r1(t)=s(t)-imf1,其中r1(t)表示残差;
15、s14、在第一残差中加入白噪声后进行经验模态分解以获得下一阶本征模态分量,基于所述下一阶本征模态分量和第一残差获得第二残差;
16、s15、以第二残差作为第一残差重复步骤s15,直到通过第一残差无法获得下一阶本征模态分量。
17、在一些实施例中,获取第k阶本征模态分量时,所述第i次加入的白噪声表示为:
18、ni(t)=σk(t)ei(ε(t)),其中σk(t)表示自适应调整的参数,k=1,2...,m,m表示获得本征模态分量的数量,ε(t)为高斯白噪声,ei(ε(t))是第i次经验模态分解的集成平均白噪声;
19、获得的第k阶本征模态分量表示为:
20、imfk表示第k阶本征模态分量,rk-1(t)表示基于第k-1阶本征模态分量和第k-2阶残差rk-2(t)获得的第k-1阶残差。
21、在一些实施例中,步骤s2中,通过所述原始测量数据与本征模态分量的相关性计算对所述若干本征模态分量进行筛选以去除伪本征模态分量,包括:
22、s21、计算原始测量数据与本征模态分量的相关系数,表示为:
23、其中r表示相关系数,x(i)表示原始测量数据的采样,y(i)表示本征模态分量的采样,i=1,2...,n,n表示采样点数,e(x)表示x(i)的均值,e(y)表示y(i)的均值;
24、s22、若r不在预设阈值范围内,则判断该本征模态分量为伪本征模态分量以去除。
25、在一些实施例中,步骤s3中,对筛选后的至少部分所述本征模态分量进行提升小波分解处理以获得所述本征模态分量的第一细节信号和逼近信号,包括:
26、s31、将本征模态分量进行分割并且按照排列顺序的奇偶分为两个小波子集,表示为:
27、其中s(k)表示本征模态分量分割片段集合的第k个元素,so(k)表示奇样本子集序列,se(k)表示偶样本子集序列;
28、s32、通过se(k)预测so(k)以获得预测结果,基于所述预测结果和所述so(k)的差获得所述第一细节信号,第一细节信号的获得表示为:
29、d(k)=so(k)-p[se(k)],其中d(k)表示第一细节信号,p[se(k)]表示se(k)对so(k)预测的预测结果,p[·]表示预测算子;
30、s33、通过第一细节信号对se(k)进行更新以获得逼近信号,表示为:
31、c(k)=se(k)-u[d(k)],其中c(k)表示逼近信号,u[·]表示更新算子。
32、在一些实施例中,步骤s4中,对所述第一细节信号进行软阈值去噪以获得第二细节信号,包括:
33、对所述第一细节信号进行软阈值小波变换去噪以获得第二细节信号,表示为:
34、其中表示第二细节信号的小波系数,w表示第一细节信号的小波系数,sgn(·)表示符号函数,λ表示阈值。
35、在一些实施例中,阈值λ表示为:
36、其中σ表示第一细节信号的噪声的标准方差,n表示第一细节信号长度。
37、本发明还提供一种光纤陀螺测量数据自适应去噪装置,包括:
38、分解模块,获取光纤陀螺的原始测量数据,通过自适应噪声的完全经验模态分解方法根据所述原始测量数据进行分解以获得若干本征模态分量;
39、筛选模块,通过所述原始测量数据与本征模态分量的相关性计算对所述若干本征模态分量进行筛选以去除伪本征模态分量;
40、提升小波模块,对筛选后的各所述本征模态分量进行提升小波分解处理以获得所述本征模态分量的第一细节信号和逼近信号;
41、第一重构模块,对所述第一细节信号进行软阈值去噪以获得第二细节信号,基于所述第二细节信号和所述逼近信号重构以获得去噪后的本征模态分量;
42、第二重构模块,基于各所述去噪后的本征模态分量重构以获得去噪后的光纤陀螺测量数据。
43、本发明还提供一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时实现如上任一实施例所述的光纤陀螺测量数据自适应去噪方法。
44、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上任一实施例所述的光纤陀螺测量数据自适应去噪方法。
45、本发明以上实施例至少具有以下有益效果:
46、本发明实施例先通过自适应噪声的完全经验模态分解方法分解出本征模态分量,再通过计算本征模态分量与原始信号之间相关系数的大小来筛选有效的本征模态分量,对有效的高频本征模态分量进行提升小波分解处理增加信号的分辨率,然后对剩余本征模态分量进行软阈值去噪和信号重构,得到去噪完成后的信号。该方法即具有自适应性又更全面的滤除了各个频率的噪声,同时具有较高的处理效率,具有实时性。
- 还没有人留言评论。精彩留言会获得点赞!