一种瓷绝缘子串无人机红外自动对焦方法及系统与流程
本发明涉及绝缘子红外检测,具体为一种瓷绝缘子串无人机红外自动对焦方法及系统。
背景技术:
1、绝缘子是一种常见的输电线路关键部件,在发输变配电系统中广泛使用;由于暴露在室外复杂环境下长期运行,绝缘子串受到机械载荷、雷电冲击、冰雹、鸟粪、酸雨、雾霾等多种复杂因素的影响,绝缘子的机械性能与电气性能会逐渐下降,进而出现缺陷;缺陷绝缘子无法承受正常的机电负载,导致局部发热、放电、纵向绝缘击穿、炸裂等现象,不利于电力系统安全稳定运行。
2、目前,绝缘子缺陷检测手段种类较多,主要有电压分布法、绝缘电阻法、泄漏电流法、红外热像法、超声波法等;其中,最常用的非接触带电检测方法是利用手持或机载红外热像仪进行巡检的红外热像法,具有效率高、安全风险小、成本低等优势。
3、在输电线路设备检修现场,通常对于绝缘子红外检测手段为无人机搭载设备到达指定位置拍摄绝缘子的红外图像,提取图像中的温度,通过温度矩阵诊断判据确定缺陷绝缘子;但现有的拍摄方式,其受限于定位精度与镜头转动角度,极小的定位误差造成绝缘子目标脱离镜头范围,难以将目标完整拍摄,因此需要调整镜头,传统的方法为人工调整,效率低下,自动调整则需要考虑移动端算力来进行实时检测。
技术实现思路
1、针对现有技术的不足,本发明提供了一种瓷绝缘子串无人机红外自动对焦方法及系统,其目的在于解决复杂背景下绝缘子现场红外检测技术领域的难题,提高绝缘子现场目标校正准确率和效率。
2、为实现上述目的,本发明提供如下技术方案:一种瓷绝缘子串无人机红外自动对焦方法,包括如下步骤:
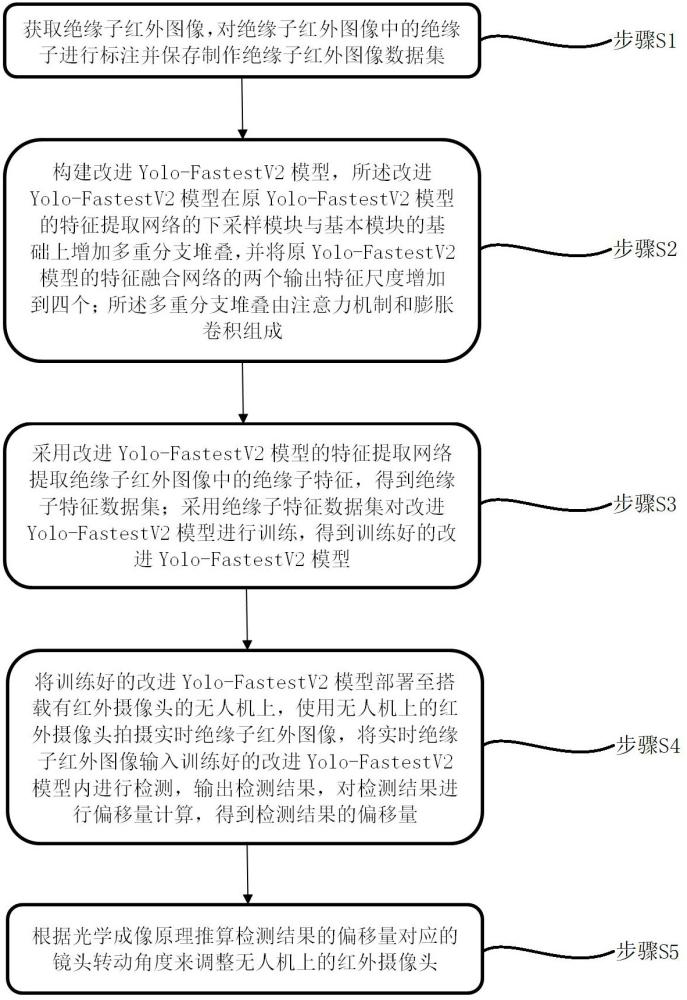
3、步骤s1:获取绝缘子红外图像,对绝缘子红外图像中的绝缘子进行标注并保存制作绝缘子红外图像数据集;
4、步骤s2:构建改进yolo-fastestv2模型,所述改进yolo-fastestv2模型在原yolo-fastestv2模型的特征提取网络的下采样模块与基本模块的基础上增加多重分支堆叠,并将原yolo-fastestv2模型的特征融合网络的两个输出特征尺度增加到四个;所述多重分支堆叠由注意力机制和膨胀卷积组成;
5、步骤s3:采用改进yolo-fastestv2模型的特征提取网络提取绝缘子红外图像中的绝缘子特征,得到绝缘子特征数据集;采用绝缘子特征数据集对改进yolo-fastestv2模型进行训练,得到训练好的改进yolo-fastestv2模型;
6、步骤s4:将训练好的改进yolo-fastestv2模型部署至搭载有红外摄像头的无人机上,使用无人机上的红外摄像头拍摄实时绝缘子红外图像,将实时绝缘子红外图像输入训练好的改进yolo-fastestv2模型内进行检测,输出检测结果,对检测结果进行偏移量计算,得到检测结果的偏移量;
7、步骤s5:根据光学成像原理推算检测结果的偏移量对应的镜头转动角度来调整无人机上的红外摄像头。
8、进一步的,所述改进yolo-fastestv2模型由特征提取网络、特征融合网络和目标检测头组成;所述特征提取网络依次由3×3卷积、最大池化层、第一带多重分支堆叠的下采样模块、第一带多重分支堆叠的基本模块、第二带多重分支堆叠的下采样模块、第二带多重分支堆叠的基本模块、第三带多重分支堆叠的下采样模块、第三带多重分支堆叠的基本模块、第四带多重分支堆叠的下采样模块、第四带多重分支堆叠的基本模块、第五带多重分支堆叠的下采样模块、第五带多重分支堆叠的基本模块、1×1卷积和全局平均池化层组成;所述特征融合网络依次由第一cbs模块、第一上采样模块、第一堆叠模块、第二cbs模块、第二上采样模块、第二堆叠模块、第三cbs模块、第三上采样模块、第三堆叠模块和第四cbs模块组成,其中,在第一cbs模块、第二cbs模块、第三cbs模块和第四cbs模块的输出端均连接有一个第一深度可分离卷积和第二深度可分离卷积;所述目标检测头由多个1×1卷积组成;所述第二带多重分支堆叠的基本模块、第三带多重分支堆叠的基本模块、第四带多重分支堆叠的基本模块和第五带多重分支堆叠的基本模块输出端分别连接第三堆叠模块、第二堆叠模块、第一堆叠模块和第一cbs模块,第一深度可分离卷积输出端连接两个1×1卷积,第二深度可分离卷积输出端连接一个1×1卷积。
9、进一步的,所述第一带多重分支堆叠的下采样模块、第二带多重分支堆叠的下采样模块、第三带多重分支堆叠的下采样模块、第四带多重分支堆叠的下采样模块和第五带多重分支堆叠的下采样模块结构相同,均分为三条支路,第一条支路依次由3×3膨胀卷积和1×1卷积组成,第二条支路依次由1×1卷积、3×3膨胀卷积和1×1卷积组成,第一条支路和第二条支路末尾的1×1卷积输出端合并,合并后依次连接第一堆叠模块、通道重排模块、通道注意力机制和第二堆叠模块和1×1卷积(降维),第三条支路依次由3×3膨胀卷积和空间注意力机制组成,空间注意力机制的输出端连接第二堆叠模块。
10、进一步的,所述第一带多重分支堆叠的基本模块、第二带多重分支堆叠的基本模块、第三带多重分支堆叠的基本模块、第四带多重分支堆叠的基本模块和第五带多重分支堆叠的基本模块结构相同,依次由通道划分模块、第一堆叠模块、通道重排模块、通道注意力机制、第二堆叠模块和1×1卷积(降维)组成,在通道划分模块输入端设有第一条支路,第一条支路依次连接3×3膨胀卷积和空间注意力机制后连接第二堆叠模块,在通道划分模块输出端设有第二条支路,第二条支路依次连接1×1卷积、3×3膨胀卷积和1×1卷积后连接堆叠模块的输入端。
11、进一步的,所述第一cbs模块、第二cbs模块、第三cbs模块和第四cbs模块结构相同,均依次由卷积层、标准化层和sigmoid激活函数组成。
12、进一步的,得到检测结果的偏移量具体过程为:
13、步骤s4.1:将实时绝缘子红外图像输入训练好的改进yolo-fastestv2模型中进行检测,得到实时绝缘子红外图像中绝缘子预测框左上角、右下角的横坐标与纵坐标,根据绝缘子预测框左上角、右下角的横坐标与纵坐标获得绝缘子预测框的中心坐标位置;
14、步骤s4.2:使用实时绝缘子红外图像的中心坐标位置减去绝缘子预测框的中心坐标位置得到水平偏移量x_offset、垂直偏移量y_offset,计算公式如下:
15、(1);
16、(2);
17、式中,x1,y1分别为绝缘子预测框左上角的横坐标与纵坐标;x2,y2分别为绝缘子预测框右下角的横坐标与纵坐标;w为实时绝缘子红外图像的宽;h为实时绝缘子红外图像的高。
18、进一步的,步骤s5的具体过程为:所述光学成像原理采用对角视场角,以实时绝缘子红外图像的像素点为单位,已知实时绝缘子红外图像的高h,宽w,视场角为2ω,则对角线l,红外摄像头的镜头到图像中心s,水平视场角度2θx,垂直视场角度2θy,计算公式如下:
19、(3);
20、(4);
21、(5);
22、(6)。
23、进一步的,步骤s1的具体过程为:使用labelimg工具标注绝缘子红外图像中的绝缘子,标注完成后,保存标注的绝缘子构建绝缘子红外图像数据集。
24、一种用于实现瓷绝缘子串无人机红外自动对焦方法的系统,包括:
25、获取模块,用于获取绝缘子红外图像,对绝缘子红外图像中的绝缘子进行标注并保存制作绝缘子红外图像数据集;
26、构建模块,用于构建改进yolo-fastestv2模型,所述改进yolo-fastestv2模型在原yolo-fastestv2模型的特征提取网络的下采样模块与基本模块的基础上增加多重分支堆叠,并将原yolo-fastestv2模型的特征融合网络的两个输出特征尺度增加到四个;所述多重分支堆叠由注意力机制和膨胀卷积组成;
27、训练模块,用于采用改进yolo-fastestv2模型的特征提取网络提取绝缘子红外图像中的绝缘子特征,得到绝缘子特征数据集;采用绝缘子特征数据集对改进yolo-fastestv2模型进行训练,得到训练好的改进yolo-fastestv2模型;
28、检测模块,用于将训练好的改进yolo-fastestv2模型部署至搭载有红外摄像头的无人机上,使用无人机上的红外摄像头拍摄实时绝缘子红外图像,将实时绝缘子红外图像输入训练好的改进yolo-fastestv2模型内进行检测,输出检测结果,对检测结果进行偏移量计算,得到检测结果的偏移量;
29、推算模块,用于根据光学成像原理推算检测结果的偏移量对应的镜头转动角度来调整无人机上的红外摄像头。
30、与现有的技术相比,本发明具备以下有益效果:本发明在满足智能算法准确率的情况下尽可能减少运算量,降低对硬件的配置要求,可以实现移动端对绝缘子的实时检测,基于yolo-fastestv2模型将输出尺度增加到四个,并多尺度融合提高小目标检测精度;通过轻量级网络进行特征提取来减少计算量,给轻量级网络增加通道注意力机制、空间注意力机制和膨胀卷积,增强有效特征,提高网络泛化能力,适用于复杂场景目标检测,此外本发明提出的绝缘子检测方法具有结构简单、易于实现等优点,应用前景广泛。
- 还没有人留言评论。精彩留言会获得点赞!