一种基于各向异性结构边缘的椭圆检测方法及系统
本发明涉及椭圆检测,尤其涉及一种基于各向异性结构边缘的椭圆检测方法及系统。
背景技术:
1、早期的椭圆检测算法通常基于霍夫变换法,这种算法的基本思想是将椭圆表示为五维参数空间中的点,对于每个可能的椭圆,算法会在参数空间中增加相应的计数,最后选取计数最高的点作为检测到的椭圆。由于用到了五维的参数空间,霍夫变换法计算复杂度极高,需要较多运算资源。后来发展出了基于图像边缘的椭圆检测算法,该方法首先提取图像的边缘图,然后从边缘图中提取出若干平滑的椭圆弧段,再根据一定的几何规则对弧段进行组合(将可能来自于同一个椭圆的弧段组合在一起),再对每个组合使用最小二乘法拟合得到椭圆参数。这类方法与霍夫变换法相比时间复杂度大幅下降,因此被更加广泛地使用。
2、现有的基于图像边缘的椭圆检测算法通常包含如图1所示的若干步骤:
3、(1)提取边缘:提取边缘通常采用canny边缘检测,然后通过深度优先算法从边缘图中提取无分岔边缘。
4、(2)提取椭圆弧段:将无分岔边缘从拐点和角点断开得到若干平滑的椭圆弧段,如图2所示。图2为一条无分岔边缘,其中c5为一个拐点,因为从该点起坐标点旋转方向发生了反转(即夹角α5和α4旋转方向相反),c9为一个角点,因为夹角α9过大,沿这两个点将无分岔边缘断开,得到三条平滑椭圆弧段(c1-c2-c3-c4-c5、c5-c6-c7-c8-c9、c9-c10-c11-c12)。
5、(3)组合椭圆弧段:接下来将弧段进行组合,若两条弧段来自于同一个椭圆,则它们应满足如下规律:依次将两条弧段的端点1、中点、端点2相连,得到的图形应为一个凸六边形,如图3所示。图3为一个弧段组合,包括两条椭圆弧段将它们的端点和中点相连得到一个凸六边形,如虚线所示。
6、(4)椭圆拟合:对于每个弧段组合,将其中的所有坐标点进行最小二乘法拟合即可得到一个候选椭圆,其表达式为ax2+bxy+cy2+dx+ey+f=0,其中x和y为各坐标点的横纵坐标,a、b、c、d、e、f为最小二乘法要拟合的目标参数,最后将表达式变形为其中xc为中心点横坐标、yc为中心点纵坐标、a为长半轴长度、b为短半轴长度、α为长半轴旋转角。
7、(5)椭圆验证:最后对候选椭圆进行验证,计算其圆周被图像边缘覆盖的比例s,若s大于一个预设的阈值τ,则将该候选椭圆输出然后进行下一个弧段组合的拟合,否则直接进行下一个弧段组合的拟合。重复步骤(3-5)直到所有弧段组合都被拟合并验证。
8、现有的各向异性边缘提取方法的特点是将canny边缘检测中的sobel梯度算子替换为各向异性高斯方向导数。首先用多个高斯方向导数卷积核与输入图像进行卷积,计算图像内各像素沿各个方向的灰度变化强度,取变化最大的方向作为梯度方向,相应的变化强度作为梯度强度;然后对梯度图进行非极大值抑制和双阈值筛选得到二值化的边缘图,即边缘检测结果。其流程如图4所示。图4中左侧一列表示边缘检测的几个主要阶段,图4中右侧一列描述每个阶段的具体措施。该技术能有效地抑制噪声并保护结构边缘的完整性和连续性。然而该技术对椭圆检测并不具备针对性,因为其同样会提取大量的非结构边缘(如纹理边缘),而椭圆检测的目标通常是特定物体的轮廓、结构信息,纹理信息对椭圆检测更多只是干扰。
9、综上所述,现有椭圆检测技术包括以下缺点:
10、缺点1:基于图像边缘的椭圆检测算法的检测质量十分依赖于边缘图的质量,然而目前并没有针对椭圆检测而提出的边缘检测算法,现有的基于图像边缘的椭圆检测算法通常使用canny算子提取图像边缘。由于canny算子使用各向同性的高斯滤波对图像进行预处理,很容易破坏图像边缘的连续性,将完整的椭圆弧段分割为若干条细小的线段,一方面会增加组合弧段的时间,另一方面会影响椭圆拟合的精度,造成大量漏检和误检。
11、缺点2:canny算子不区分纹理和结构边缘,而图像中的待检测椭圆多为目标物体的主要结构的轮廓,纹理信息几乎是多余的,因此提取出的纹理边缘只是在增加无意义的检测时间,同时还干扰目标椭圆的检测,影响检测精度。
12、缺点3:现有方法并不区分检测出的椭圆来自真正的边缘还是噪声边缘,对所有候选结果采用相同的方法进行验证,导致最终输出的检测结果中保留了大量由噪声边缘拟合而成的假阳性椭圆(通常为小椭圆),精确率进一步降低。
技术实现思路
1、为此,本发明实施例提供了一种基于各向异性结构边缘的椭圆检测方法及系统,用于解决现有技术中现有的椭圆检测方法检测效率低、精度低等问题。
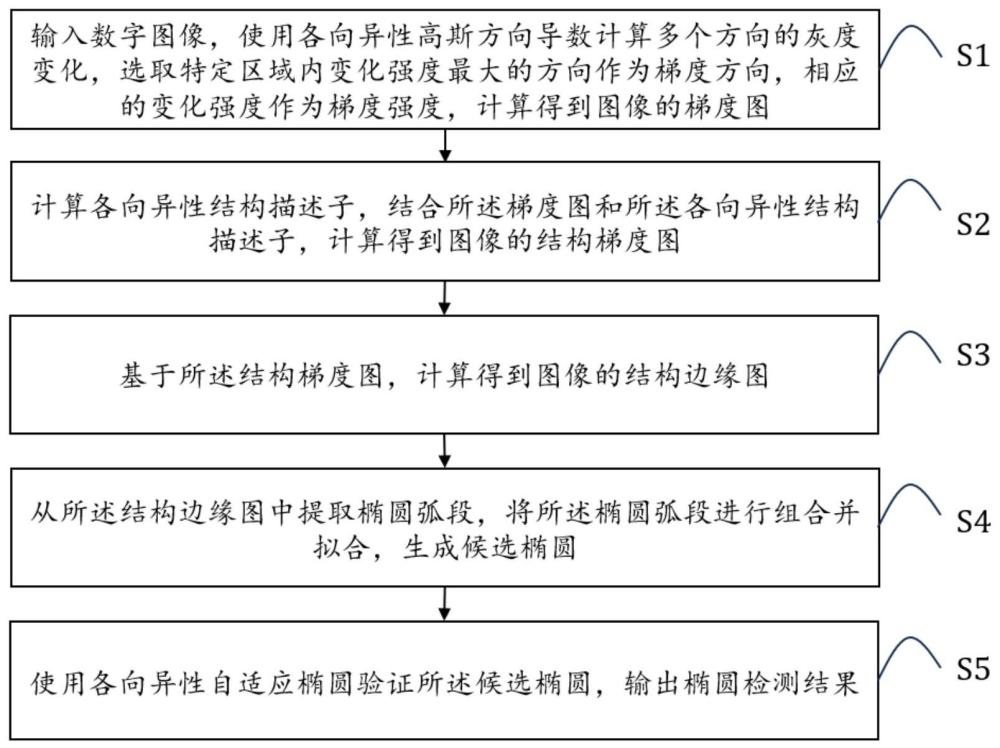
2、为了解决上述问题,本发明实施例提供一种基于各向异性结构边缘的椭圆检测方法,该方法包括:
3、步骤s1:输入数字图像,使用各向异性高斯方向导数计算多个方向的灰度变化,选取特定区域内变化强度最大的方向作为梯度方向,相应的变化强度作为梯度强度,计算得到图像的梯度图;
4、步骤s2:计算各向异性结构描述子,结合所述梯度图和所述各向异性结构描述子,计算得到图像的结构梯度图;
5、步骤s3:基于所述结构梯度图,计算得到图像的结构边缘图;
6、步骤s4:从所述结构边缘图中提取椭圆弧段,将所述椭圆弧段进行组合并拟合,生成候选椭圆;
7、步骤s5:使用各向异性自适应椭圆验证所述候选椭圆,输出椭圆检测结果。
8、优选地,在步骤s1中,使用各向异性高斯方向导数计算多个方向的灰度变化,选取特定区域内变化强度最大的方向作为梯度方向,相应的变化强度作为梯度强度,计算得到图像的梯度图,具体包括:
9、步骤s11:使用各向异性高斯方向导数计算x处的梯度方向gθ(x):
10、
11、其中
12、
13、
14、
15、式中,为灰度变化强度;x为像素点;θ为图像与x轴方向的夹角;g(x,θ;σ,ρ)为各向异性高斯方向导数;σ为控制平滑程度;ρ为各向异性因子;r为旋转矩阵;为对函数求参数的函数;
16、步骤s12:计算x处的梯度强度gm(x):
17、
18、步骤s13:计算x处的梯度的向量表示
19、
20、优选地,在步骤s2中,计算各向异性结构描述子的方法为:
21、
22、其中
23、
24、
25、
26、式中,x、y为像素点;d(x)为各向异性结构描述子;n(x)是一个以x为中心的各向异性窗口;d1(x)为该窗口内各像素梯度的模的加权平均;d2(x)为该窗口内各像素梯度向量的加权平均的模;w(x)为各向异性结构描述子窗口内的权值之和;ξ为控制该窗口内实际影响区域的大小;φ为各向异性因子;ε是一个大于0的极小量;r为旋转矩阵;gθ(x)为x处的梯度方向。
27、优选地,在步骤s2中,结合所述梯度图和所述各向异性结构描述子,计算得到图像的结构梯度图的方法为:
28、
29、式中,表示结构梯度图;d(x)为各向异性结构描述子;为x处的梯度的向量表示。
30、优选地,在步骤s3中,基于所述结构梯度图,计算得到图像的结构边缘图的方法为:
31、基于所述结构梯度图,使用非极大值抑制和双阈值筛选,获取二值化的结构边缘图。
32、优选地,在步骤s4中,从所述结构边缘图中提取椭圆弧段,将所述椭圆弧段进行组合并拟合,生成候选椭圆的方法为:
33、首先使用深度优先搜索从结构边缘图中提取所有无分岔边缘,将无分岔边缘从角点和拐点处断开,得到若干平滑的椭圆弧段;然后将所有满足弧段组合条件的弧段两两组合并进行最小二乘法拟合,得到一个候选椭圆,其表达式为ax2+bxy+cy2+dx+ey+f=0,其中x和y为各坐标点的横纵坐标,a、b、c、d、e、f为最小二乘法要拟合的目标参数,最后将表达式变形为其中xc为中心点横坐标、yc为中心点纵坐标、a为长半轴长度、b为短半轴长度、α为长半轴旋转角。
34、优选地,在步骤s5中,使用各向异性自适应椭圆验证所述候选椭圆,输出椭圆检测结果,具体包括:
35、步骤s51:将一个候选椭圆记为e(xc,yc,a,b,α),其中(xc,yc)为中心坐标,a和b分别为长短半轴长度,α为长半轴相对于x轴的旋转角,从e上均匀选取m个采样点,第i个采样点pi(xi,yi)的计算方式为:
36、
37、式中,θi=2πi/m;
38、步骤s52:求出候选椭圆上采样点pi处的法向量ni:
39、ni=r(π/2-α)(-a sin θi,b cos θi)t
40、式中,r为旋转矩阵;
41、步骤s53:计算采样点pi的各向异性验证得分si:
42、
43、式中,表示结构梯度图;si计算的是采样点pi处椭圆法线和图像边缘法线的相似度与结构梯度强度的乘积,当采样点pi处存在结构边缘且其方向与椭圆一致时,si达到最大值;
44、步骤s54:计算候选椭圆e的得分s,当且仅当得分s大于验证阈值τ,椭圆候选e将被保留到检测结果中,否则,将候选椭圆e移除,其中候选椭圆e的得分s为各采样点各向异性得分的平均值,即
45、
46、优选地,所述验证阈值τ的计算方法为:
47、
48、式中,τ0为一个基础阈值;w和h分别为输入图像的宽和高;为候选椭圆e和输入图像的相对大小;β为缩放系数;tanh为双曲正切函数。
49、本发明实施例还提供了一种基于各向异性结构边缘的椭圆检测系统,该系统用于实现上述所述的基于各向异性结构边缘的椭圆检测方法,具体包括:
50、梯度图计算模块,用于输入数字图像,使用各向异性高斯方向导数计算多个方向的灰度变化,选取特定区域内变化强度最大的方向作为梯度方向,相应的变化强度作为梯度强度,计算得到图像的梯度图;
51、结构梯度图计算模块,用于计算各向异性结构描述子,结合所述梯度图和所述各向异性结构描述子,计算得到图像的结构梯度图;
52、结构边缘图计算模块,用于基于所述结构梯度图,计算得到图像的结构边缘图;
53、候选椭圆生成模块,用于从所述结构边缘图中提取椭圆弧段,将所述椭圆弧段进行组合并拟合,生成候选椭圆;
54、检测模块,用于使用各向异性自适应椭圆验证所述候选椭圆,输出椭圆检测结果。
55、本发明实施例还提供了一种计算机存储介质,所述计算机存储介质存储有计算机软件产品,所述计算机软件产品包括的若干指令,用以使得一台计算机设备执行上述所述的基于各向异性结构边缘的椭圆检测方法。
56、从以上技术方案可以看出,本发明申请具有以下优点:
57、(1)本发明使用各向异性高斯方向导数来计算多个方向的灰度变化,选取特定区域内变化强度最大的方向作为梯度方向,相应的变化强度作为梯度强度,相对于现有的梯度算子(sobel算子、prewitt算子、laplacian算子等)对结构边缘更加敏感,能有效降低结构边缘的漏检率,保证检测到的结构边缘的连续性,因此能够提取出更完整的椭圆弧段,提升椭圆检测的召回率。
58、(2)图像梯度信息反映了图像各像素灰度大小的变化强度和变化方向,现有的梯度算子在计算过程中只考虑x和y两个方向的灰度变化,而数字图像属于离散信号,这样的计算方法得到的梯度方向和梯度强度并不准确。本发明考虑的多个方向的变化,计算方式更加符合图像梯度的定义,得到的梯度信息更加准确,因此能更加精确地定位椭圆边缘。
59、(3)本发明提出了一种各向异性结构描述子来描述各个边缘像素,可将非结构边缘的梯度信息消除,以减少用于椭圆检测的无效边缘,在降低运算复杂度的同时还有效地减少了假阳性的出现。此外,本发明还提出一种各向异性自适应椭圆验证来更准确地消除假阳性检测结果,进一步降低噪声边缘的影响,提升精确率。
60、(4)本发明相对于现有的椭圆检测方法具有精确率高、召回率高、时间复杂度低等特点。
- 还没有人留言评论。精彩留言会获得点赞!