长短叶片形式的后向离心叶轮设计方法与设计装置与流程
本发明涉及离心风机,尤其涉及一种长短叶片形式的后向离心叶轮设计方法与设计装置。
背景技术:
1、随着人们生活水平的提高,扫地机器人一类的清洁设备因为操作简单、使用方便,越来越多地走入了人们生活,和家庭、办公联系在了一起,成为了小家电中重要的一员,深受欢迎。
2、而在扫地机器人中,发挥主要作用的是其内部的高速离心风机。高速离心风机的离心叶轮是直观体现扫地机器人性能的主要组件,而随着人们生活水平和健康意识的大幅提升,人们对高速离心风机的清洁性能和噪声水平更为关注。
3、因此,高速离心风机在这些设备中如何高效、稳定、安静地运行是相关产品设计和工程优化中的关键问题,现有技术对离心风机进行优化设计依赖产品设计者的经验,因此设计过程需要花费较多的设计时间和经济成本,效率较低,难以满足离心风机越来越高的性能设计要求。
技术实现思路
1、本发明旨在提出一种长短叶片形式的后向离心叶轮设计方法与设计装置,通过该设计方法和设计装置使得后向离心叶轮具有较高出口静压和效率、并降低噪声的优点。
2、第一方面,本发明提供一种长短叶片形式的后向离心叶轮设计方法,所述设计方法包括以下步骤:
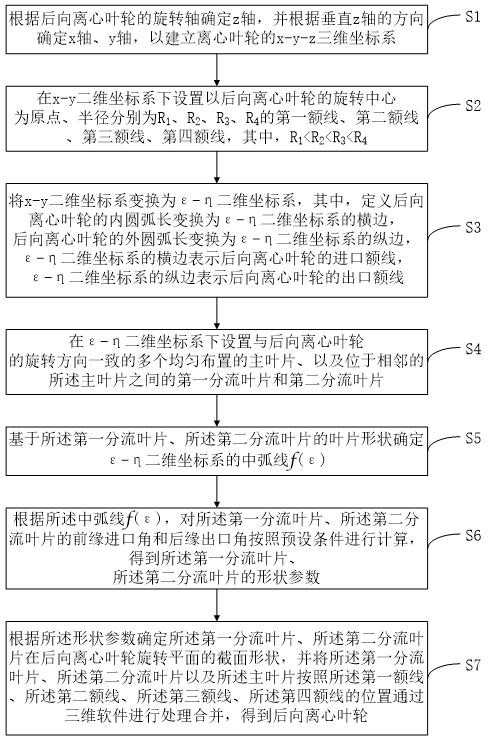
3、s1、根据后向离心叶轮的旋转轴确定z轴,并根据垂直z轴的方向确定x轴、y轴,以建立后向离心叶轮的x-y-z三维坐标系;
4、s2、在x-y二维坐标系下设置以后向离心叶轮的旋转中心为原点、半径分别为r1、r2、r3、r4的第一额线、第二额线、第三额线、第四额线,其中,r1<r2<r3<r4;
5、s3、将x-y二维坐标系变换为ε-η二维坐标系,其中,定义后向离心叶轮的内圆弧长变换为ε-η二维坐标系的横边,后向离心叶轮的外圆弧长变换为ε-η二维坐标系的纵边,ε-η二维坐标系的横边表示后向离心叶轮的进口额线,ε-η二维坐标系的纵边表示后向离心叶轮的出口额线;
6、s4、在ε-η二维坐标系下设置与后向离心叶轮的旋转方向一致的多个均匀布置的主叶片、以及位于相邻的所述主叶片之间的第一分流叶片和第二分流叶片;
7、s5、基于所述第一分流叶片、所述第二分流叶片的叶片形状确定ε-η二维坐标系的中弧线;
8、s6、根据所述中弧线,对所述第一分流叶片、所述第二分流叶片的前缘进口角和后缘出口角按照预设条件进行计算,得到所述第一分流叶片、所述第二分流叶片的形状参数;
9、s7、根据所述形状参数确定所述第一分流叶片、所述第二分流叶片在后向离心叶轮旋转平面的截面形状,并将所述第一分流叶片、所述第二分流叶片以及所述主叶片按照所述第一额线、所述第二额线、所述第三额线、所述第四额线的位置通过三维软件进行处理合并,得到后向离心叶轮。
10、更进一步地,所述主叶片的进口贴合于所述第一额线,所述主叶片的出口贴合于所述第四额线;所述第一分流叶片的进口贴合于所述第二额线,所述第一分流叶片的出口贴合于所述第三额线;所述第二分流叶片的进口贴合于所述第三额线,所述第二分流叶片的出口贴合于所述第四额线。
11、更进一步地,步骤s3中,根据如下表达式将x-y二维坐标系变换为ε-η二维坐标系:
12、ε=atan(y/x);
13、。
14、更进一步地,在ε-η二维坐标系:
15、所述主叶片在ε-η二维坐标系中进口的纵坐标值为inr1,出口的纵坐标值为inr4,所述主叶片在ε-η二维坐标系平面的长度为2π,宽度为in(r4)-in(r1);
16、所述第一分流叶片在ε-η二维坐标系中进口的纵坐标值为inr2,出口的纵坐标值为inr3,所述第一分流叶片在ε-η二维坐标系平面的长度为2π,宽度为in(r3)-in(r2);
17、所述第二分流叶片在ε-η二维坐标系中进口的纵坐标值为inr3,出口的纵坐标值为inr4,所述第二分流叶片ε-η二维坐标系在平面的长度为2π,宽度为in(r4)-in(r3)。
18、更进一步地,所述中弧线满足,且具有以下必要边界条件:
19、以所述中弧线在ε-η二维坐标系中横坐标轴上的长度作为1个单位量,所述中弧线的起始点p0与ε-η二维坐标系的原点重合,所述起始点p0在ε-η二维坐标系中的横向单位量为0,纵向单位量为0,;
20、所述中弧线的所述前缘进口角满足;
21、定义所述中弧线的尾缘点为p2,所述尾缘点p2在ε-η二维坐标系中的横向单位量为1,纵向单位量为,即,对应的,所述后缘出口角满足。
22、更进一步地,定义交接点为p1,所述交接点将所述中弧线分为以所述起始点p0为始、以所述交接点p1为末的第一弧线、以及以所述交接点p1为始、以所述尾缘点p2为末的第二弧线;所述交接点p1在ε-η二维坐标系中的横向单位量为,纵向单位量为,其切角为,即;
23、所述中弧线的二阶导数的二次积分满足:
24、;
25、其中,a、b、c、d为中弧线控制系数;
26、定义所述中弧线中所述前缘进口角、所述后缘出口角处的二阶导数分别为p、q,步骤s6中的所述预设条件,具体为:
27、对于所述前缘进口角处的二阶导数p,其满足约束(1):
28、(1);
29、对于所述后缘出口角处的二阶导数q,其满足约束(2):
30、(2);
31、约束(1)、(2)中,a1、b1、c1、d1为所述第一弧线的控制系数,a2、b2、c2、d2为所述第二弧线的控制系数;
32、其中,、。
33、更进一步地,,。
34、更进一步地,位于相邻的所述主叶片之间的所述第一分流叶片和所述第二分流叶片各自所在弧线形成的相位角为,且满足。
35、更进一步地,,,,。
36、第二方面,本发明还提供一种长短叶片形式的后向离心叶轮设计装置,包括:
37、初始坐标模块,用于根据后向离心叶轮的旋转轴确定z轴,并根据垂直z轴的方向确定x轴、y轴,以建立后向离心叶轮的x-y-z三维坐标系;
38、额线设置模块,用于在x-y二维坐标系下设置以后向离心叶轮的旋转中心为原点、半径分别为r1、r2、r3、r4的第一额线、第二额线、第三额线、第四额线,其中,r1<r2<r3<r4;
39、坐标转换模块,用于将x-y二维坐标系变换为ε-η二维坐标系,其中,定义后向离心叶轮的内圆弧长变换为ε-η二维坐标系的横边,后向离心叶轮的外圆弧长变换为ε-η二维坐标系的纵边,ε-η二维坐标系的横边表示后向离心叶轮的进口额线,ε-η二维坐标系的纵边表示后向离心叶轮的出口额线;
40、叶片设置模块,用于在ε-η二维坐标系下设置与后向离心叶轮的旋转方向一致的多个均匀布置的主叶片、以及位于相邻的所述主叶片之间的第一分流叶片和第二分流叶片;
41、数学建模模块,用于基于所述第一分流叶片、所述第二分流叶片的叶片形状确定ε-η二维坐标系的中弧线;
42、数学优化模块,用于根据所述中弧线,对所述第一分流叶片、所述第二分流叶片的前缘进口角和后缘出口角按照预设条件进行计算,得到所述第一分流叶片、所述第二分流叶片的形状参数;
43、组合处理模块,用于根据所述形状参数确定所述第一分流叶片、所述第二分流叶片在后向离心叶轮旋转平面的截面形状,并将所述第一分流叶片、所述第二分流叶片以及所述主叶片按照所述第一额线、所述第二额线、所述第三额线、所述第四额线的位置通过三维软件进行处理合并,得到后向离心叶轮。
44、本发明所达到的有益效果,在于根据风机基本参数的特点提出了一种长短叶片形式的后向离心叶轮设计方法,通过该方法及装置设计得到的包含多个主叶片和处于相邻主叶片之间的两级分流叶片的后向离心叶轮,可以有效抑制叶片尾缘处的流动分离和二次流,提高出口静压及效率,并降低噪声;并且,该设计方法能够便于计算机设备辅助设计,从而在设计过程中减少人工误差并提高设计效率,能够有效地提高风机性能。
- 还没有人留言评论。精彩留言会获得点赞!